TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004478
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104193
出願日
2023-06-26
発明の名称
位置推定装置および位置推定方法
出願人
国立大学法人千葉大学
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/28 20060101AFI20250107BHJP(測定;試験)
要約
【課題】位置推定精度が高い位置推定装置および位置推定方法を提供する。
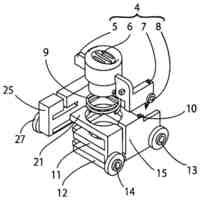
【解決手段】歩数を推定する歩数推定部と、歩幅を推定する歩幅推定部と、進行方向を推定する進行方向推定部と、を備える位置推定装置10であって、歩数推定部は、所定の周期における少なくとも縦方向の1軸方向の加速度に基づく第1振幅より歩数を検出可能な第1振幅検出手段と、所定の周期における横方向の1軸または2軸方向の加速度に基づく第2振幅より歩数を検出可能な第2振幅検出手段と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
歩数を推定する歩数推定部と、歩幅を推定する歩幅推定部と、進行方向を推定する進行方向推定部と、を備える位置推定装置であって、
前記歩数推定部は、所定の周期における少なくとも縦方向の1軸方向の加速度に基づく第1振幅より歩数を検出可能な第1振幅検出手段と、前記所定の周期における横方向の1軸または2軸方向の加速度に基づく第2振幅より歩数を検出可能な第2振幅検出手段と、を有する位置推定装置。
続きを表示(約 790 文字)
【請求項2】
前記歩数推定部は、前記第1振幅検出手段または前記第2振幅検出手段により歩数が検出されると、他の振幅検出手段は用いない請求項1に記載の位置推定装置。
【請求項3】
前記歩数推定部は、前記第2振幅検出手段に先立って前記第1振幅検出手段による検出を行う請求項2に記載の位置推定装置。
【請求項4】
前記位置推定装置は、加速度、角速度、地磁気に基づいて姿勢を推定する姿勢推定部をさらに備える請求項1ないし3のいずれかに記載の位置推定装置。
【請求項5】
前記歩数推定部は、ロール軸の傾きに応じて歩行状態を判別する請求項4に記載の位置推定装置。
【請求項6】
前記歩数推定部は、特定の周期における縦方向の1軸方向の加速度に基づく第3振幅より歩数を検出可能な第3振幅検出手段をさらに有し、
前記判別された歩行状態がながら歩行状態であれば前記第1振幅検出手段と前記第2振幅検出手段を併用し、前記姿勢推定部によって判別された歩行状態が手振り歩行状態であれば前記第3振幅検出手段を用いる請求項5に記載の位置推定装置。
【請求項7】
前記歩幅推定部は、横方向の2軸方向の加速度と、縦方向の1軸方向の加速度によって歩幅を推定する請求項1に記載の位置推定装置。
【請求項8】
歩数を推定する歩数推定処理と、歩幅を推定する歩幅推定処理と、進行方向を推定する進行方向推定処理と、を備える位置推定方法であって、
前記歩数推定処理は、所定の周期における少なくとも縦方向の1軸方向の加速度に基づく第1振幅より歩数を検出可能な第1振幅検出ステップと、前記所定の周期における横方向の1軸または2軸方向の加速度に基づく第2振幅より歩数を検出可能な第2振幅検出ステップと、を有する位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行者の位置推定装置および位置推定方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、スマートフォンやタブレットなどのモバイル端末の普及により、ユーザの位置情報を推定する位置推定装置および位置推定方法への需要が増加している。このような位置推定の手法は、スターレコニングと、デッドレコニングに大別される。
【0003】
スターレコニングの手法の一例として知られるGPS(Global Positioning System)は、複数の人工衛星から電波を受信することで正確な位置推定を行うことができる。その一方で、正確な位置推定を行うには屋外など遮蔽物が少ない場所であることが好ましく、地下や屋内施設では不向きである。
【0004】
デッドレコニングの手法の一例として知られるPDR(Pedestrian Dead Reckoning,歩行者自律航法)は、モバイル端末に内蔵されたセンサから取得した加速度、地磁気などに基づいてある地点からの相対位置を推定することができる。そのため、屋内・屋外に関わらず位置推定を行うことができるという利点がある。
【0005】
例えば、特許文献1の位置推定装置は、PDRを用いて位置推定を行うものであって、センサから取得した加速度、地磁気などに基づいて歩数推定、歩幅推定、進行方向推定を行う。そして、ある地点から移動した距離を歩数と歩幅の積として算出し、推定した進行方向を反映することで、移動後の位置推定を行うことができる。
【先行技術文献】
【特許文献】
【0006】
特開平9-89584号公報(第4,5頁、第3図)
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1のような位置推定装置においては、x軸、y軸、z軸の3軸について各方向の加速度を検出する加速度センサを用いて、位置推定装置を体の前に持ち画面を見ながら歩行するいわゆるながら歩行、体の横に持ち手振りで歩行するいわゆる手振り歩行などの歩行状態にかかわらず、歩数を推定することができる。
【0008】
加速度センサを用いた歩数推定では、z軸方向の加速度から得たピーク値とあらかじめ設定された閾値を比較して歩数を推定する方法、z軸方向の加速度の増減が切り替わるタイミングの数に応じて歩数を推定する方法が一般的である。
【0009】
しかしながら、前者の方法では歩幅が小さいなどによりピーク値が閾値を超えないと歩数としてカウントされない虞があり、後者の方法では着地時の振動などのノイズを歩数としてカウントする虞がある。特にPDRによる位置推定では歩数の誤差が位置推定にて大幅なずれが発生する大きな要因となっている。
【0010】
本発明は、このような課題に着目してなされたもので、位置推定精度が高い位置推定装置および位置推定方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人千葉大学
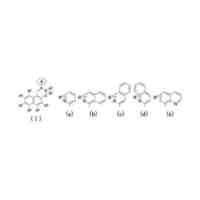
表示素子
5か月前
国立大学法人千葉大学
抗真菌剤
7か月前
国立大学法人千葉大学
フルコンバータ
2か月前
国立大学法人千葉大学
副室式エンジン
2か月前
国立大学法人千葉大学
アンモニア吸蔵材
7か月前
国立大学法人千葉大学
照明器具及びフィルタ
1か月前
国立大学法人千葉大学
成膜装置及び成膜方法
2か月前
国立大学法人千葉大学
自由エネルギーの計算方法
4か月前
国立大学法人千葉大学
設計支援装置および設計支援方法
7か月前
スタンレー電気株式会社
観測装置
2か月前
スタンレー電気株式会社
観測装置
5か月前
個人
光渦を用いた神経性疾患の治療装置
1か月前
キッコーマン株式会社
酪酸菌の生育促進剤
6か月前
国立大学法人千葉大学
樹脂用可塑剤として有用な新規イソソルビド誘導体
2か月前
国立大学法人千葉大学
架橋構造を有する脂肪族ポリカーボネートの製造方法
2か月前
キッコーマン株式会社
酪酸又は乳酸の産生量増強剤
6か月前
国立大学法人千葉大学
画像処理装置、画像機器、画像処理方法、及びプログラム
3か月前
国立大学法人千葉大学
エポキシド類製造用触媒、及び、エポキシド類の製造方法
1か月前
国立大学法人千葉大学
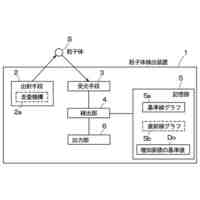
粒子体検出装置、粒子体検出方法及び粒子体検出プログラム
3か月前
国立大学法人千葉大学
画像処理装置、画像処理システム、画像処理方法及びプログラム
2か月前
国立大学法人千葉大学
サリチリデンアミノピリジンと二置換ホウ素から形成される発光材料
7か月前
国立大学法人千葉大学
アンジオテンシン変換酵素II(ACE2)に対する高親和性モノクローナル抗体
7か月前
日清紡ホールディングス株式会社
培養液、イチゴ栽培施設およびイチゴ栽培方法
5か月前
岡本化学工業株式会社
カチオン重合開始剤およびそれを用いた光学的立体造形用組成物
2か月前
国立大学法人千葉大学
炭素繊維強化樹脂とガラス繊維強化樹脂とを含む材料組成物から炭素繊維を回収する方法
2か月前
国立大学法人千葉大学
水素発生触媒、水素発生触媒の活性化用組成物、水素発生装置および水素発生触媒の活性化方法
2か月前
国立大学法人千葉大学
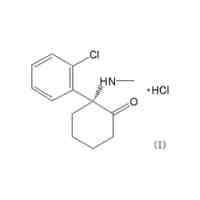
R-ケタミンおよびその塩の医薬品としての応用
7か月前
国立大学法人千葉大学
副作用情報検索システム、副作用情報検索装置、副作用情報検索方法、及びコンピュータプログラム
2か月前
国立大学法人千葉大学
水素発生合金、水素発生合金の使用方法、マグネシウム電池用負極材、発電用水素発生剤、水素吸蔵合金及びポーラス金属材
3か月前
国立大学法人千葉大学
コロイド結晶構造の作製方法、コロイド結晶構造の転写方法、転写物、コロイド粒子、コロイド結晶構造、コロイド結晶膜およびコロイド結晶構造を作製するための組成物
5か月前
個人
メジャー文具
1か月前
日本精機株式会社
検出装置
10日前
個人
採尿及び採便具
16日前
個人
高精度同時多点測定装置
1か月前
個人
計量機能付き容器
5日前
個人
アクセサリー型テスター
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ