TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174448
公報種別
公開特許公報(A)
公開日
2024-12-17
出願番号
2023092274
出願日
2023-06-05
発明の名称
回転電機制御装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
H02P
25/22 20060101AFI20241210BHJP(電力の発電,変換,配電)
要約
【課題】過電流を抑制可能な回転電機制御装置を提供する。
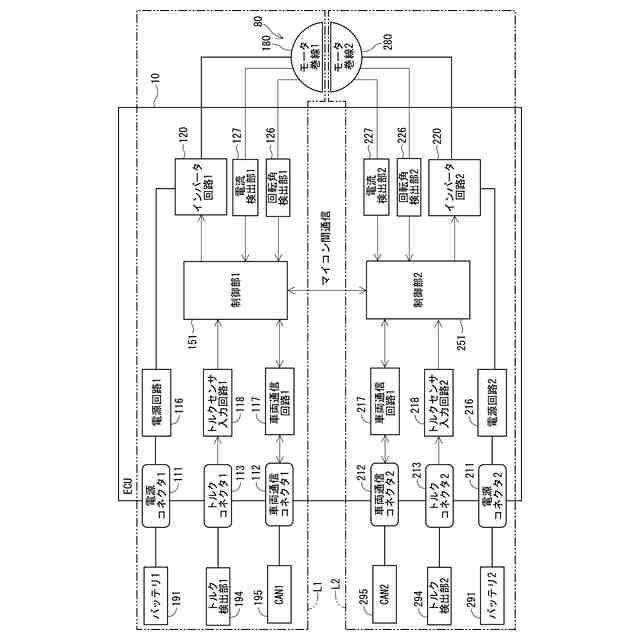
【解決手段】ECU10は、複数組のモータ巻線180、280を有するモータ80の駆動を制御するものであって、複数の制御部151、251を備える。制御部151、251は、電流検出値および電流指令値に基づいてモータ巻線180、280に印加する電圧指令値を演算し、電圧指令値に基づいてモータ巻線180、280の通電を制御する通電制御部を有し、モータ巻線180、280ごとに設けられて相互に通信可能である。ECU10は、系統間で少なくとも1つのパラメータを共用して通電制御を行う協調駆動制御を実施可能である。第2制御部251は、第1制御部151から送信された電流指令値を用いてモータ巻線の通電制御を行う。第1制御部151は、第2制御部251に送信したものと同じ電流指令値を用いてモータ巻線の通電制御を行う。
【選択図】 図4
特許請求の範囲
【請求項1】
複数組のモータ巻線(180、280)を有する回転電機(80)の駆動を制御する回転電機制御装置であって、
前記モータ巻線に通電される電流の電流検出値および電流指令値に基づいて前記モータ巻線に印加する電圧指令値を演算し、前記電圧指令値に基づいて前記モータ巻線の通電を制御する通電制御部(500、600)を有し、前記モータ巻線ごとに設けられて相互に通信可能である複数の制御部(151、251)を備え、
前記モータ巻線と対応する前記制御部との組み合わせを系統とし、系統間で少なくとも1つのパラメータを共用して通電制御を行う協調駆動制御を実施可能であって、
1つの前記制御部(151)をメイン制御部、他の前記制御部(251)をサブ制御部とすると、
前記サブ制御部は、前記メイン制御部から送信された前記電流指令値を用いて前記モータ巻線の通電制御を行い、
前記メイン制御部は、前記サブ制御部に送信したものと同じ前記電流指令値を用いて前記モータ巻線の通電制御を行う、回転電機制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記メイン制御部は、前記サブ制御部に送信する前記電流指令値を格納可能な送信部(171)を有し、前記送信部に格納した前記電流指令値を用いて前記モータ巻線の通電制御を行う請求項1に記載の回転電機制御装置。
【請求項3】
前記メイン制御部は、前記サブ制御部に送信する前記電流指令値を格納可能な送信部(171)を有し、前記送信部に格納されている前記電流指令値が更新されていない場合、前記電流指令値として前回値を保持して前記モータ巻線の通電制御を行う請求項1に記載の回転電機制御装置。
【請求項4】
前記サブ制御部は、前記メイン制御部から送信された前記電流指令値を前記メイン制御部に送り返し、
前記メイン制御部にて、前記サブ制御部から送り返された前記電流指令値と、自系統の前記電流指令値とを比較し、値が異なっていた場合、前記電圧指令値を制限する、または、前記協調駆動制御を停止する請求項1~3のいずれか一項に記載の回転電機制御装置。
【請求項5】
複数組のモータ巻線(180、280)を有する回転電機(80)の駆動を制御する回転電機制御装置であって、
前記モータ巻線に通電される電流の電流検出値および電流指令値に基づいて前記モータ巻線に印加する電圧指令値を演算し、前記電圧指令値に基づいて前記モータ巻線の通電を制御する通電制御部(500、600)を有し、前記モータ巻線ごとに設けられて相互に通信可能である複数の制御部(151、251)を備え、
前記モータ巻線と対応する前記制御部との組み合わせを系統とし、系統間で少なくとも1つのパラメータを共用して通電制御を行う協調駆動制御を実施可能であって、
前記通電制御部は、自系統の前記電流検出値と他系統の前記電流検出値との電流和および電流差を用いた電流フィードバック制御において、電流和に基づくフィードバック演算結果である和のフィードバック制御量、および、電流差に基づくフィードバック演算結果である差のフィードバック制御量の上下限を制限する回転電機制御装置。
【請求項6】
前記和のフィードバック制御量の上下限を制限する和の制限値と、前記差のフィードバック制御量の上下限を制限する差の制限値とは等しい、請求項5に記載の回転電機制御装置。
【請求項7】
前記通電制御部は、前記和のフィードバック制御量または前記差のフィードバック制御量の一方が制限値で制限されている場合、前記和のフィードバック制御量または前記差のフィードバック制御量の他方は、前回値を保持する請求項5に記載の回転電機制御装置。
【請求項8】
1つの前記制御部は、電流制御演算に用いる定数である設定定数を、他の前記制御部に送信する請求項1~3、5~7のいずれか一項に記載の回転電機制御装置。
【請求項9】
前記制御部は、電流制御に用いる定数である設定定数について、自身で持つ値と他の前記制御部の値とが異なっている場合、前記電圧指令値を制限する、または、前記協調駆動制御を停止する請求項1~3、5~7のいずれか一項に記載の回転電機制御装置。
【請求項10】
前記制御部は、前記電流検出値、または、複数系統の前記電流検出値の和が電流異常判定閾値より大きい場合、前記電圧指令値を制限する、または、前記協調駆動制御を停止する請求項1~3、5~7のいずれか一項に記載の回転電機制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転電機制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、複数の系統を協調させて回転電機の駆動を制御する回転電機制御装置が知られている。例えば特許文献1では、第1制御部にて演算された指令値に基づき、第1系統および第2系統の通電を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2018-130007号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
第1制御部から通信にて送られる指令値を用いて第2制御部での演算を行う場合、例えば第1制御部側にて演算負荷増大等により指令演算が通信タイミングに間に合わず、第1制御部と第2制御部とで異なる指令値を用いた制御が行われると、電圧指令値が増大し、過電流が生じる虞がある。
【0005】
また、協調駆動制御において、複数系統の電流和および電流差を制御している場合、系統間で電流指令値が異なると、制御量が増大する。また、この状態で電流和と電流差の制御量のバランスが崩れると、過電流が生じる虞がある。
【0006】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、過電流を抑制可能な回転電機制御装置を提供することにある。
【課題を解決するための手段】
【0007】
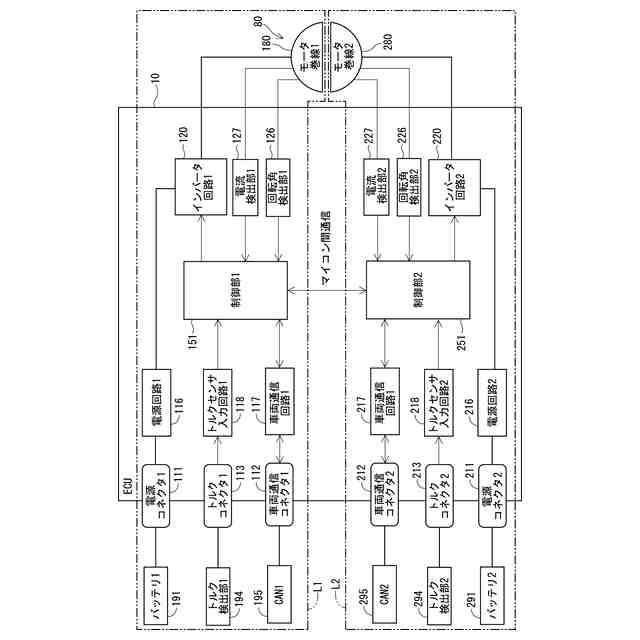
本発明の回転電機制御装置は、複数組のモータ巻線(180、280)を有する回転電機(80)の駆動を制御するものであって、モータ巻線に通電される電流の電流検出値および電流指令値に基づいてモータ巻線に印加する電圧指令値を演算し、電圧指令値に基づいてモータ巻線の通電を制御する通電制御部(500、600)を有し、モータ巻線ごとに設けられて相互に通信可能である複数の制御部(151、251)を備える。回転電機制御装置は、モータ巻線と対応する制御部との組み合わせを系統とし、系統間で少なくとも1つのパラメータを共用して通電制御を行う協調駆動制御を実施可能である。
【0008】
1つの態様では、1つの制御部(151)をメイン制御部、他の制御部(251)をサブ制御部とすると、サブ制御部は、メイン制御部から送信された電流指令値を用いてモータ巻線の通電制御を行い、メイン制御部は、サブ制御部に送信したものと同じ電流指令値を用いてモータ巻線の通電制御を行う。
【0009】
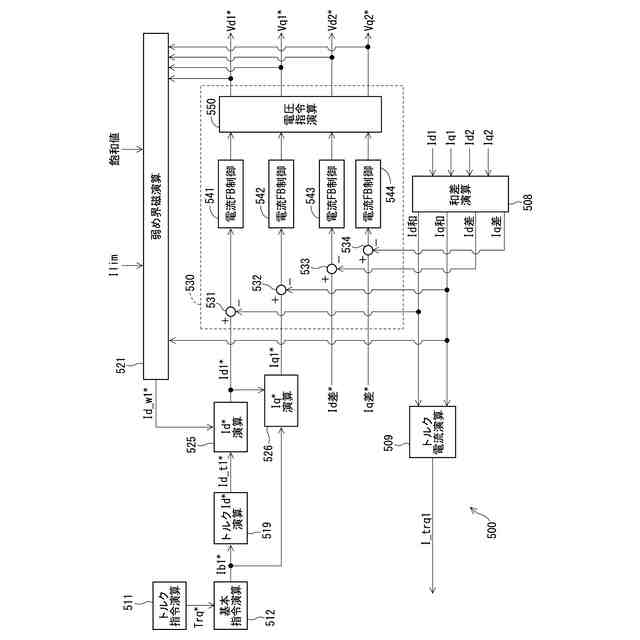
もう1つの態様では、通電制御部は、自系統の電流検出値と他系統の電流検出値との電流和および電流差を用いた電流フィードバック制御において、電流和に基づくフィードバック演算結果である和のフィードバック制御量、および、電流差に基づくフィードバック演算結果である差のフィードバック制御量の上下限を制限する。これにより、過電流を防ぐことができる。
【図面の簡単な説明】
【0010】
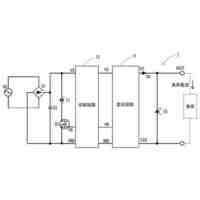
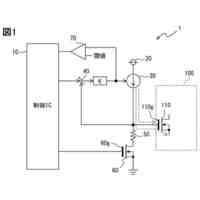
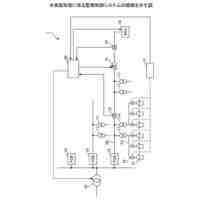
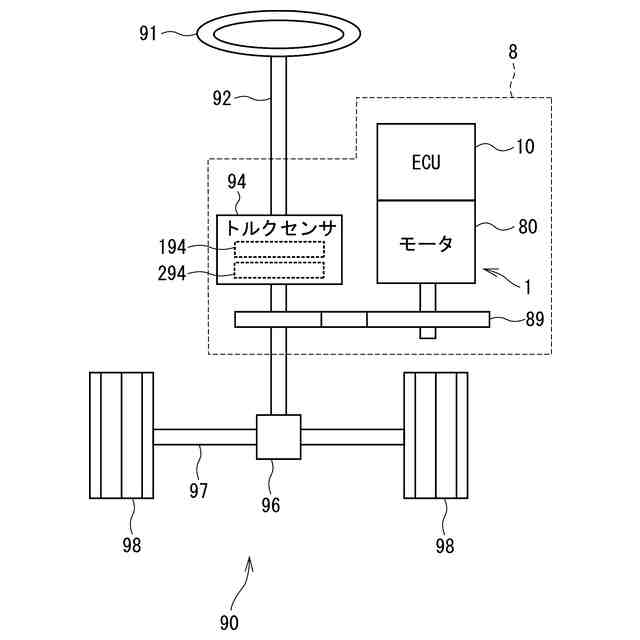
第1実施形態による電動パワーステアリング装置の概略構成図である。
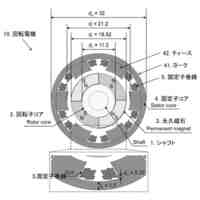
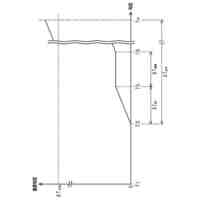
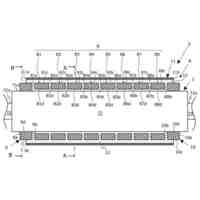
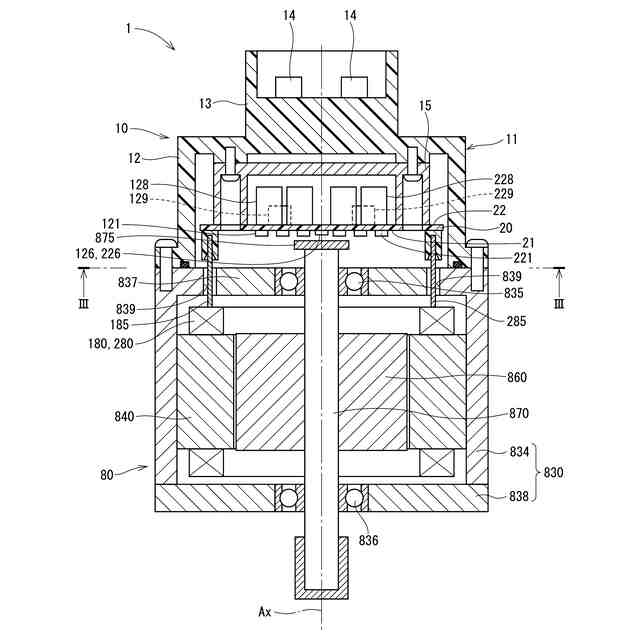
第1実施形態による駆動装置の断面図である。
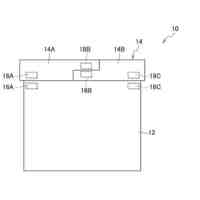
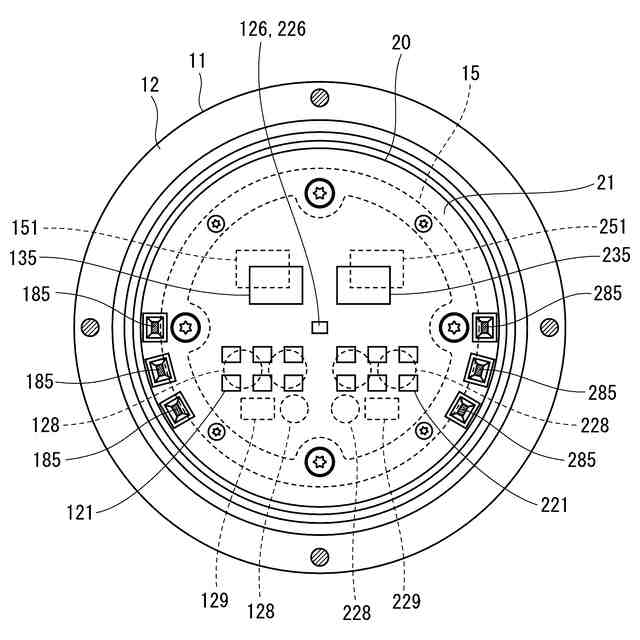
図2のIII-III線断面図である。
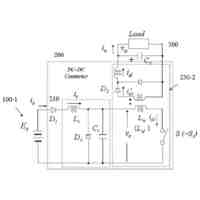
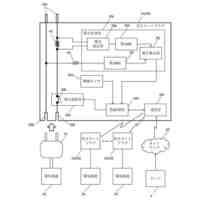
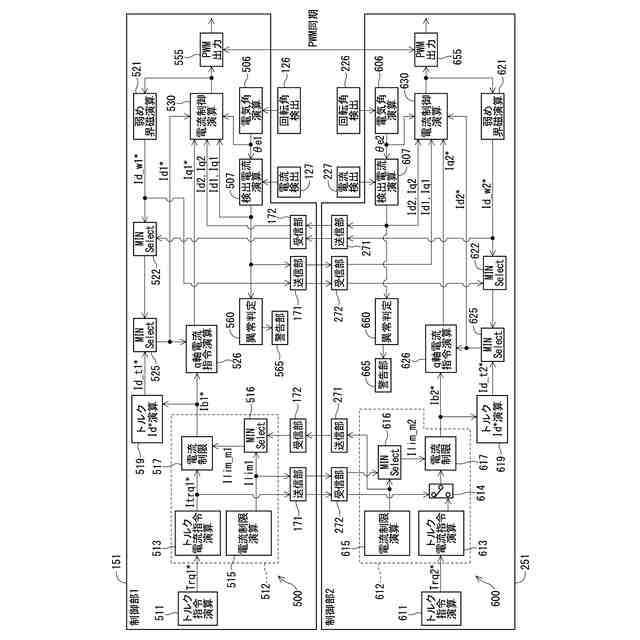
第1実施形態によるECUの構成を示すブロック図である。
第1実施形態による第1制御部の通電制御部を示すブロック図である。
第1実施形態による第1制御部および第2制御部の通電制御部を示すブロック図である。
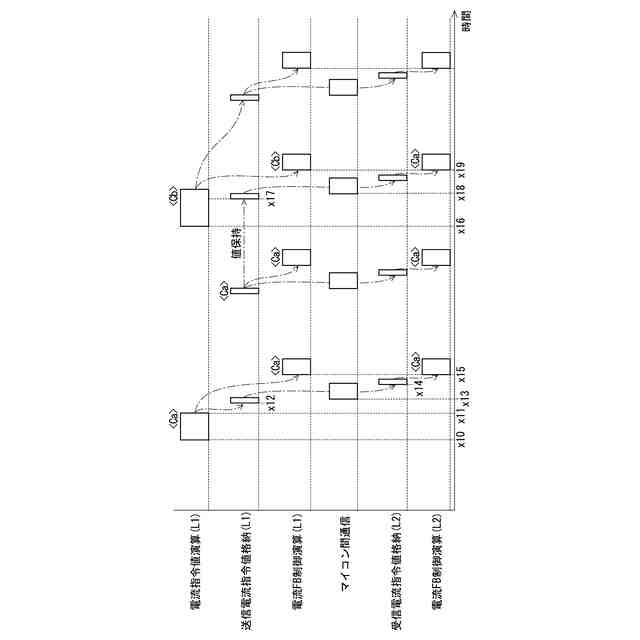
参考例による電流制御処理を説明するタイムチャートである。
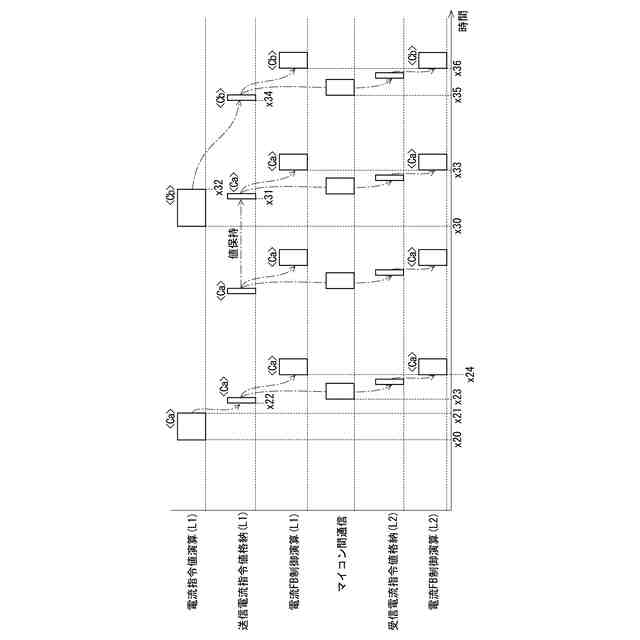
第1実施形態による電流制御処理を説明するタイムチャートである。
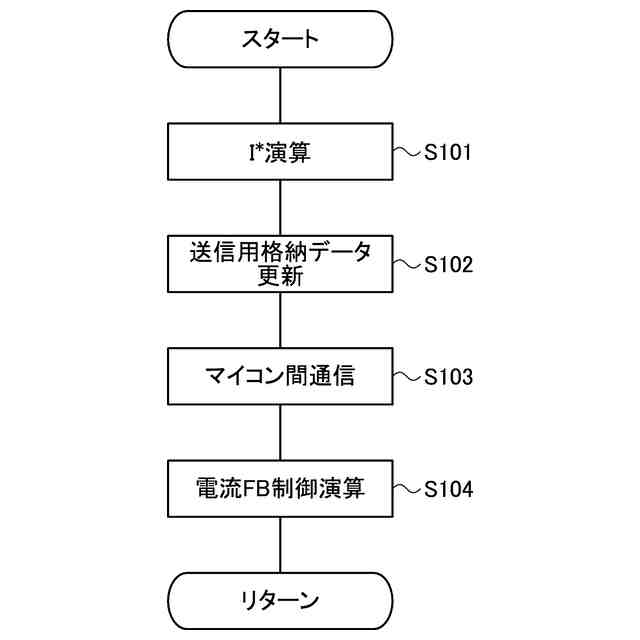
第1実施形態による電流制御処理を説明するフローチャートである。
第2実施形態による電流制御処理を説明するフローチャートである。
第2実施形態による電流制御処理を説明するタイムチャートである。
第2実施形態による電流制御処理を説明するタイムチャートである。
第2実施形態による電流制御処理を説明するタイムチャートである。
第3実施形態による設定定数送信処理を説明するフローチャートである。
電流検出値および電流指令値を示すタイムチャートである。
電流指令値が異なる場合の第1制御部のFB制御量を示すタイムチャートである。
電流指令値が異なる場合の第2制御部のFB制御量を示すタイムチャートである。
和のFB制御量と差のFB制御量の制限値が異なる場合の電圧指令値を示すタイムチャートである。
和のFB制御量と差のFB制御量の制限値が異なる場合の電流を示すタイムチャートである。
第4実施形態によるFB制御量制限処理を説明するフローチャートである。
第4実施形態によるFB制御量および電圧指令値を示すタイムチャートである。
第4実施形態によるFB制御量を示すタイムチャートである。
第4実施形態によるFB制御量を示すタイムチャートである。
第5実施形態による異常判定処理を説明するフローチャートである。
第5実施形態による異常時処置への移行を説明するタイムチャートである。
第6実施形態による異常判定処理を説明するフローチャートである。
第7実施形態による第1制御部における指令値比較処理を説明するフローチャートである。
第7実施形態による第2制御部における指令値比較処理を説明するフローチャートである。
第7実施形態による指令値比較処理を説明するタイムチャートである。
第7実施形態による指令値比較処理を説明するタイムチャートである。
第8実施形態による第1制御部における指令値比較処理を説明するフローチャートである。
第8実施形態による第2制御部における指令値比較処理を説明するフローチャートである。
第8実施形態による指令値比較処理を説明するタイムチャートである。
第9実施形態による第1制御部における指令値比較処理を説明するフローチャートである。
第9実施形態による第2制御部における指令値比較処理を説明するフローチャートである。
第9実施形態による指令値比較処理を説明するタイムチャートである。
第10実施形態による第1制御部における設定定数比較処理を説明するフローチャートである。
第10実施形態による第1制御部における設定定数比較処理を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
7日前
カヤバ株式会社
モータ
7日前
個人
共振電流制御形直流電源
今日
国立大学法人信州大学
回転電機
今日
株式会社ミクニ
電動装置
13日前
ニチコン株式会社
電源装置
今日
ブラザー工業株式会社
充電器
7日前
ブラザー工業株式会社
充電器
7日前
コバックス株式会社
補助電源システム
7日前
株式会社ダイヘン
充電装置
7日前
三菱電機株式会社
ガス絶縁開閉装置
14日前
株式会社豊田自動織機
モータ
14日前
株式会社豊田自動織機
ステータ
今日
富士電機株式会社
電力変換装置
14日前
株式会社ジェイテクト
制御装置
今日
株式会社ダイヘン
充電システム
7日前
富士電機株式会社
電力変換装置
7日前
株式会社アイシン
発電装置
14日前
ネグロス電工株式会社
気密カバー
14日前
株式会社デンソー
駆動回路
1日前
矢崎総業株式会社
電気接続箱
2日前
日機装株式会社
回転電機およびポンプ装置
2日前
株式会社豊田自動織機
電力変換装置
14日前
株式会社豊田自動織機
電力変換装置
7日前
富士電機株式会社
監視制御システム
15日前
株式会社豊田自動織機
電力変換装置
7日前
株式会社デンソー
電力変換装置
7日前
株式会社デンソー
電力変換装置
7日前
株式会社リビングロボット
電力監視システム
1日前
西芝電機株式会社
充電システム
7日前
トヨタ紡織株式会社
ロータの製造装置
8日前
株式会社アイシン
車両用駆動装置
7日前
株式会社京三製作所
電気転てつ機
7日前
株式会社豊田自動織機
車載電力変換装置
7日前
株式会社アイシン
電源モジュール
7日前
エイブリック株式会社
電流制限回路及び電流制限装置
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ