TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165255
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081288
出願日
2023-05-17
発明の名称
車両制御装置
出願人
株式会社日立製作所
代理人
弁理士法人平木国際特許事務所
主分類
B60W
30/14 20060101AFI20241121BHJP(車両一般)
要約
【課題】乗員の身体的乗り心地を向上させることができる車両制御装置を提供する。
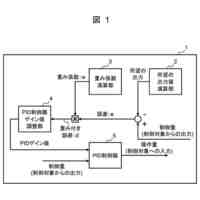
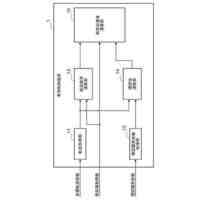
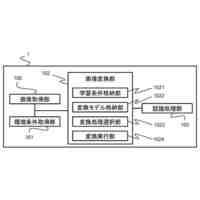
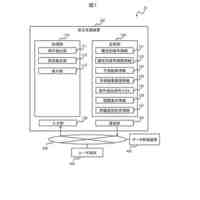
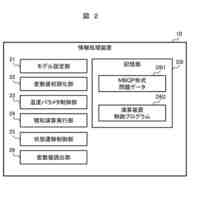
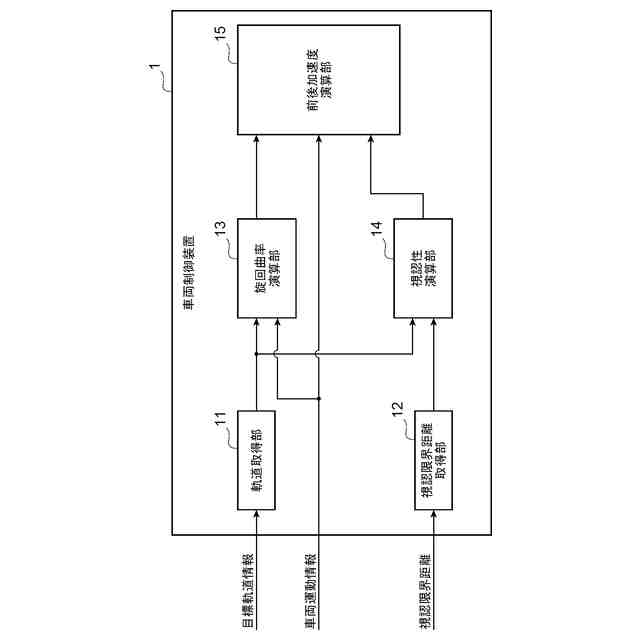
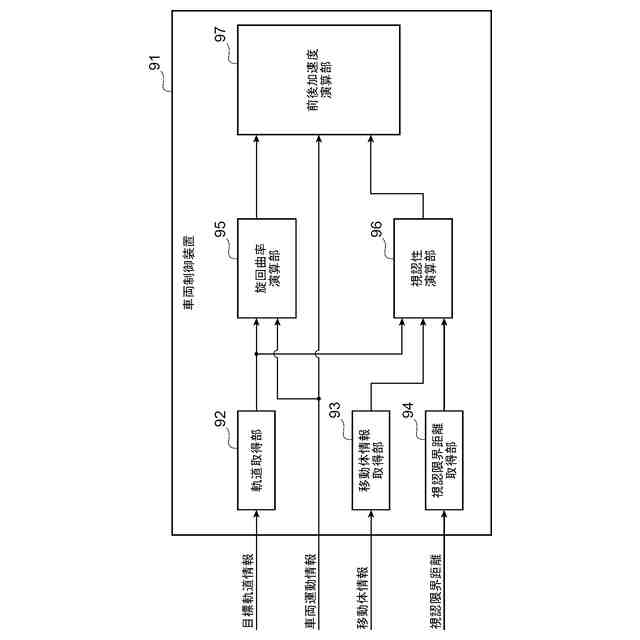
【解決手段】車両制御装置(1、91、121)の一態様は、自動運転車両が走行する目標軌道情報、地図情報などに基づいた視認限界距離を取得し、目標軌道情報から旋回曲率、目標軌道情報及び視認限界距離から乗員の視認性を算出した後、自動運転車両の前後加速度を演算する装置であって、軌道取得部(11、92、122)、視認限界距離取得部(12、94、123)、旋回曲率演算部(13、95、124)、視認性演算部(14、96、125)、前後加速度演算部(15、97、127)を備える。前後加速度演算部(15、97、127)は、前記曲率情報の変化率、前記視認性情報の変化率、前記車両運動情報を用いて自動運転車両に指令する前後加速度を演算する。
【選択図】図1
特許請求の範囲
【請求項1】
車両が走行する目標軌道情報を取得する軌道取得部と、
視認限界距離を取得する視認限界距離取得部と、
前記目標軌道情報と自車情報を用いて旋回曲率を演算する旋回曲率演算部と、
前記目標軌道情報と前記視認限界距離を用いて乗員視認性を演算する視認性演算部と、
前記旋回曲率と前記乗員視認性を用いて前記車両の前後加速度を演算する前後加速度演算部と、を備えることを特徴とする車両制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の車両制御装置において、
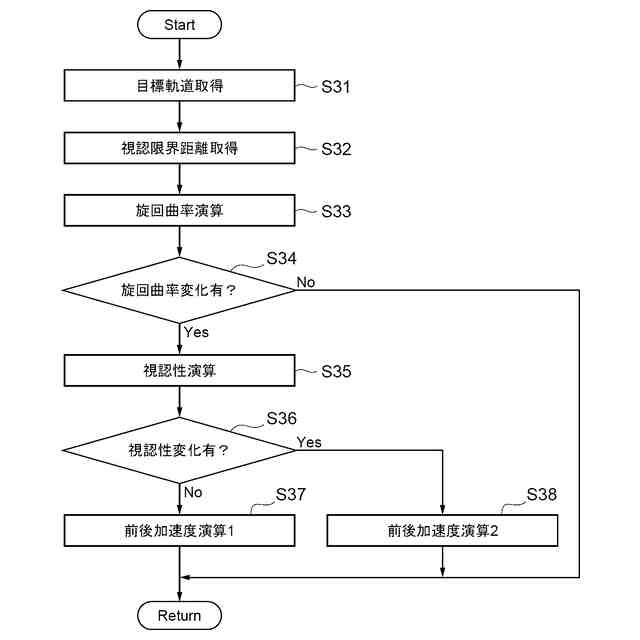
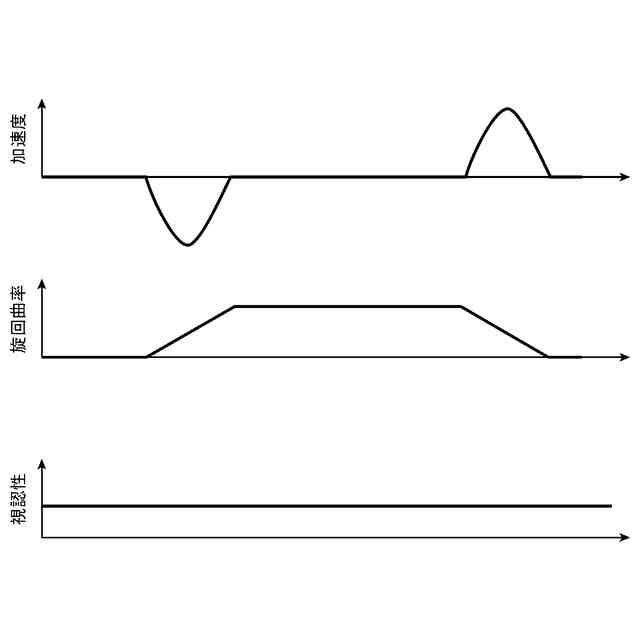
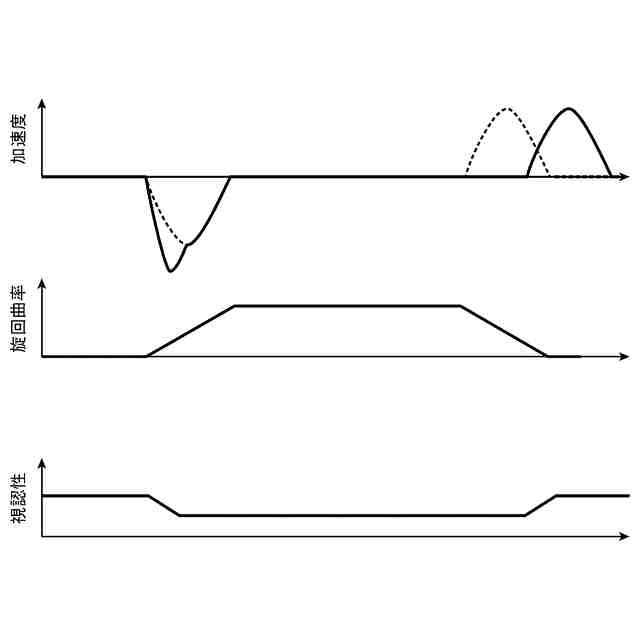
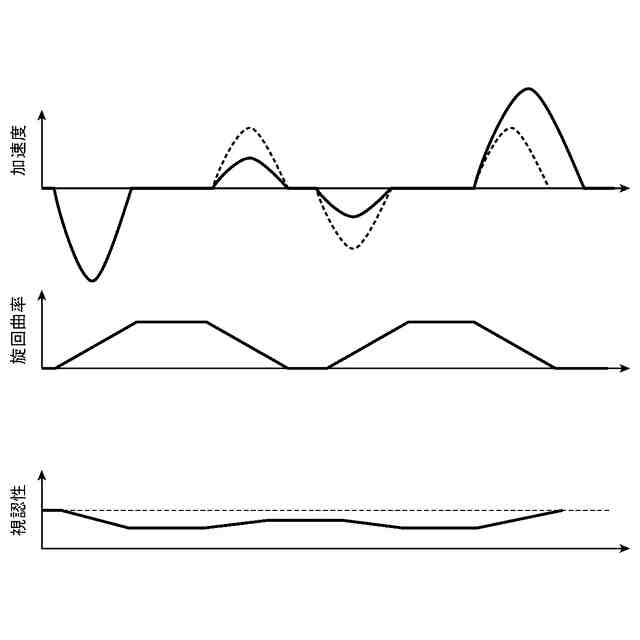
前記前後加速度演算部は、前記旋回曲率の変化率と速度の積に基づいて演算される第1前後加速度指令値と、前記乗員視認性の変化率と速度の積に基づいて演算される第2前後加速度指令値に基づいて前後加速度指令値を演算することを特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記前後加速度演算部は、前記旋回曲率の変化率が正かつ前記乗員視認性の変化率が負の場合において減速指令値を前記車両の前後加速度として出力し、前記旋回曲率の変化率が負かつ前記乗員視認性の変化率が正の場合において加速指令値を前記車両の前後加速度として出力することを特徴とする車両制御装置。
【請求項4】
請求項2に記載の車両制御装置において、
前記前後加速度演算部は、前記旋回曲率の変化率が負かつ前記乗員視認性の変化率が0の場合において、加速指令値を抑制することを特徴とする車両制御装置。
【請求項5】
請求項2に記載の車両制御装置において、
前記前後加速度演算部は、前方注視点における前記旋回曲率の変化及び前記乗員視認性の変化に基づいて前記車両の前後加速度を演算することを特徴とする車両制御装置。
【請求項6】
請求項1に記載の車両制御装置において、
前記乗員視認性は、視認可能な道路面積とすることを特徴とする車両制御装置。
【請求項7】
請求項1に記載の車両制御装置において、
前記車両の周辺環境に存在する移動体情報を取得する移動体情報取得部をさらに備え、
前記視認性演算部は、前記目標軌道情報と前記視認限界距離と前記移動体情報を用いて前記乗員視認性を演算することを特徴とする車両制御装置。
【請求項8】
請求項7に記載の車両制御装置において、
前記視認性演算部は、前記移動体情報が前記視認限界距離に影響を与える場合は前記移動体情報との相対速度関係を用いて前記乗員視認性を調整することを特徴とする車両制御装置。
【請求項9】
請求項1に記載の車両制御装置において、
前記旋回曲率と前記乗員視認性を用いて前記車両の走行速度を演算する走行速度演算部をさらに備え、
前記前後加速度演算部は、前記走行速度に基づいて前記車両の前後加速度を演算することを特徴とする車両制御装置。
【請求項10】
請求項2に記載の車両制御装置において、
前記前後加速度演算部は、前記旋回曲率の変化率が正かつ前記乗員視認性の変化率が負の場合において前記車両の前後加速度として出力する減速指令値を、前記旋回曲率の変化率が正かつ前記乗員視認性の変化率が0の場合において前記車両の前後加速度として出力する減速指令値よりも大きくすることを特徴とする車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転車両の車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
自動車におけるADAS(先進運転支援システム)及び自動運転関連技術の開発が、近年、急速に進められており、快適な移動を提供する必要がある。快適な移動を提供するためには車両前後方向、横方向などの車両運動のみならず乗員の視認情報を考慮した制御が必要となる。乗員の視認情報を考慮した車両制御に関する手法として、車両の走行制御装置(特許文献1参照)、車両制御装置(特許文献2参照)がある。
【0003】
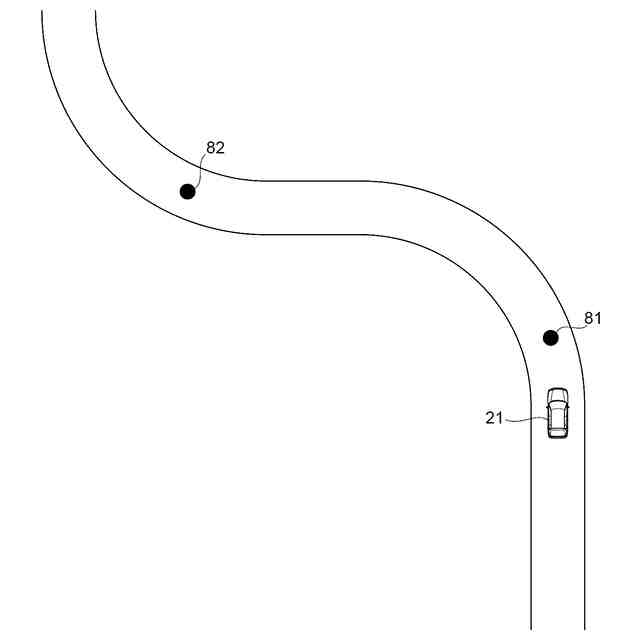
特許文献1に記載の車両の走行制御装置は、車線区画線データ、道路に沿って存在するガードレール、縁石等の側壁データ、車両等の立体物データ等を自車両からの相対的な位置を算出することで旋回方向内側の路端を算出し、カーブの見通し情報を算出する。自動運転制御によるカーブ通過時の目標車速とカーブの見通し情報の関係に基づいて車速補正値を算出することで車速を調整し、カーブ中でもドライバのフィーリングに合致した適切な車速でカーブを走行することが可能となる。
【0004】
特許文献2に記載の車両制御装置は、カメラ画像に基づいて現在走行している車線を規定する二つの区画線を特定し、将来情報(将来曲率)に基づいて車両が進入しつつある曲線路を安定して走行することを可能にするための目標加速度を演算する。
【先行技術文献】
【特許文献】
【0005】
特開2017-171027号公報
特開2020-069956号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の車両の走行制御装置においては、自車両がカーブを通過する際の旋回半径に基づいて目標速度を演算しており、自動運転車両が実際に走行する軌道の曲率情報に基づいて目標車速を演算しておらず、実際の走行に適した車速が演算されていない可能性がある。また、目標車速と車速補正値を用いることで車速を調整しており、加速度を調整していないことから、乗員の乗り心地を悪化させてしまうことがある。
【0007】
特許文献2に記載の車両制御装置は、カメラ情報で検知された将来曲率に基づいて加減速を実施しており、カメラ情報が取得できない状況においては適切な加減速を実現することができない。
【0008】
本発明は、上記事情に鑑みてなされたものであり、乗員の身体的乗り心地を向上させることができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明に係る車両制御装置の一態様は、車両が走行する目標軌道情報を取得する軌道取得部と、視認限界距離を取得する視認限界距離取得部と、前記目標軌道情報と自車情報を用いて旋回曲率を演算する旋回曲率演算部と、前記目標軌道情報と前記視認限界距離を用いて乗員視認性を演算する視認性演算部と、前記旋回曲率と前記乗員視認性を用いて前記車両の前後加速度を演算する前後加速度演算部と、を備える。
【発明の効果】
【0010】
本発明によれば、生成軌道情報及び乗員が視認する道路形状に基づいた車両の加減速を実施することで、乗員の身体的乗り心地を向上させることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
推進装置
7日前
株式会社日立製作所
制御装置
14日前
株式会社日立製作所
軌条車両
6日前
株式会社日立製作所
推進システム
7日前
株式会社日立製作所
放射線モニタ
27日前
株式会社日立製作所
車両制御装置
7日前
株式会社日立製作所
乗客コンベアー
7日前
株式会社日立製作所
超音波検査装置
8日前
株式会社日立製作所
地図情報処理装置
27日前
株式会社日立製作所
異常検知システム
14日前
株式会社日立製作所
塗料および被塗布物
1日前
株式会社日立製作所
推定システム及び方法
7日前
株式会社日立製作所
発電システム制御装置
7日前
株式会社日立製作所
テキスト生成システム
7日前
株式会社日立製作所
製造装置及び製造方法
1日前
株式会社日立製作所
データ管理装置及び方法
7日前
株式会社日立製作所
巻上機及びエレベーター
14日前
株式会社日立製作所
補強部材を備えた鉄道車両
8日前
株式会社日立製作所
監視システムおよび監視方法
27日前
株式会社日立製作所
検査支援方法及び検査支援装置
13日前
株式会社日立製作所
異常検知装置及び異常検知方法
14日前
株式会社日立製作所
環境認識装置及び環境認識方法
7日前
株式会社日立製作所
人物特性推定システム及び方法
7日前
株式会社日立製作所
パネル解体システムおよび方法
13日前
株式会社日立製作所
半導体装置およびその製造方法
6日前
株式会社日立製作所
受注支援装置および受注支援方法
1日前
株式会社日立製作所
更新方法、データベース更新装置
27日前
株式会社日立製作所
製造評価装置および製造評価方法
8日前
株式会社日立製作所
昇降路での作業のための据付装置
14日前
株式会社日立製作所
システム及びシステムの制御方法
27日前
株式会社日立製作所
情報処理装置並びに情報処理方法
14日前
株式会社日立製作所
磁場発生装置および磁気冷凍装置
27日前
株式会社日立製作所
需給計画装置および需給計画方法
6日前
株式会社日立製作所
電子装置、及び電磁妨害低減方法
15日前
株式会社日立製作所
超音波検査装置及び超音波検査方法
13日前
株式会社日立製作所
画像認識システム及び画像認識方法
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ