TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143702
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056496
出願日
2023-03-30
発明の名称
航跡管理装置、航跡管理方法、及びプログラム
出願人
日本電気株式会社
代理人
弁理士法人ブライタス
主分類
G01S
13/66 20060101AFI20241003BHJP(測定;試験)
要約
【課題】移動物体の軌道予測において、その信頼度が高く、予測された軌道情報を利用する外部システムの処理負荷及び、その外部システムと接続する通信ネットワークへの通信負荷を軽減する。
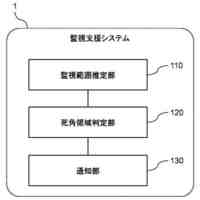
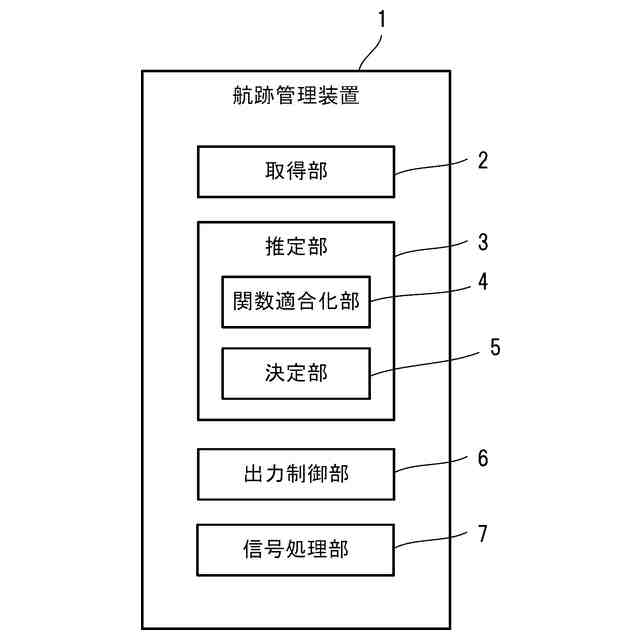
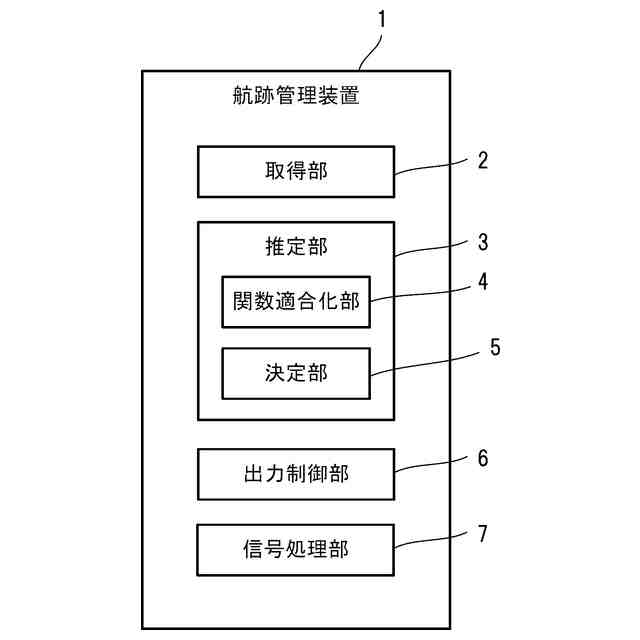
【解決手段】航跡管理装置は、点列の形式で移動物体に関する時系列の軌跡情報を取得する取得部と、軌跡情報を第1関数の形式に変換し、予め登録された所定の式表現で表された複数の第2関数からいずれかの第2関数を取得し、第1関数の形式に変換された軌道情報である変換済軌跡情報と第2関数とに基づいて、変換済軌跡情報を第2関数の式表現に適合させた第3関数を決定し、決定した第3関数に基づいて移動物体に関する軌跡情報を推定する推定部と、推定した軌跡情報を出力装置に出力する出力制御部と、を備える。
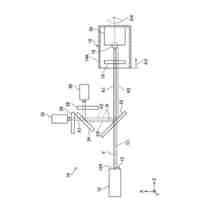
【選択図】図1
特許請求の範囲
【請求項1】
点列の形式で移動物体に関する時系列の軌跡情報を取得する取得手段と、
前記軌跡情報を第1関数の形式に変換し、予め登録された所定の式表現で表された複数の第2関数からいずれかの第2関数を取得し、前記第1関数の形式に変換された軌道情報である変換済軌跡情報と前記第2関数とに基づいて、前記変換済軌跡情報を前記第2関数の式表現に適合させた第3関数を決定し、決定した前記第3関数に基づいて前記移動物体に関する軌跡情報を推定する推定手段と、
推定した前記軌跡情報を出力装置に出力する出力制御手段と、
を備えることを特徴とする航跡管理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記推定手段は、
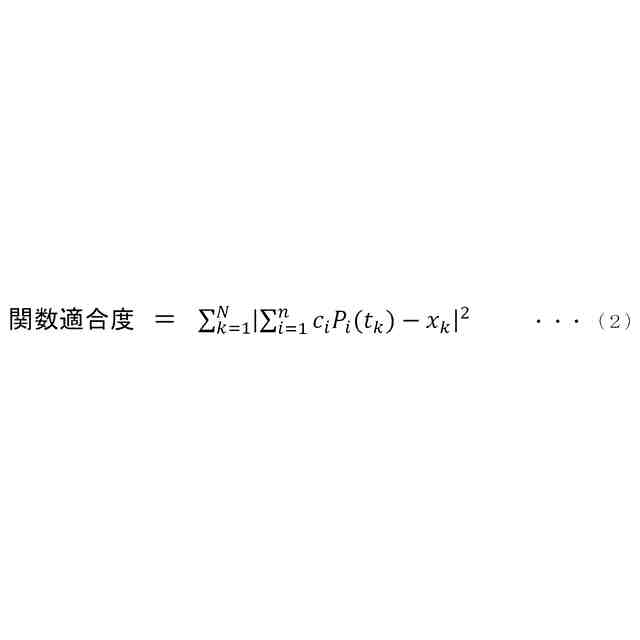
前記複数の第2関数それぞれについて、前記変換済軌跡情報を前記第2関数の式表現に適合させた前記第3関数を決定し、前記第3関数と前記変換済軌跡情報とに基づいて、前記第3関数毎に、前記第3関数への前記変換済軌跡情報の適合度を算出する関数適合化手段と、
前記適合度に基づいて、前記第3関数から1つの関数を決定する決定手段と、
を備えることを特徴とする請求項1に記載の航跡管理装置。
【請求項3】
前記決定手段は、複数の第3関数のうち最も前記適合度の高い第3関数を選定する
ことを特徴とする請求項2に記載の航跡管理装置。
【請求項4】
前記決定手段は、前記適合度に基づいて、複数の第3関数を合成する
ことを特徴とする請求項2に記載の航跡管理装置。
【請求項5】
前記関数適合化手段は、前記第2関数と、前記第2関数による適合化手法を規定する情報とに基づいて、前記第2関数の式表現に適合させた第3関数を決定する
ことを特徴とする請求項2に記載の航跡管理装置。
【請求項6】
前記関数適合化手段は、前記第2関数が特定の運動モデルに基づくパラメータ付き関数である場合、前記第2関数と前記変換済軌跡情報とに基づいて、前記特定の運動モデルに基づくパラメータの最適値を算出する
ことを特徴とする請求項2に記載の航跡管理装置。
【請求項7】
前記関数適合化手段は、前記第2関数毎に定まっている内積演算が定義された関数空間中の直交関数系に基づいて、前記軌跡情報の前記直交関数系による線形表現の係数を算出する
ことを特徴とする請求項2に記載の航跡管理装置。
【請求項8】
前記航跡管理装置は、さらに、
センサーから前記移動物体の軌跡情報に関する信号を取得し、取得した前記信号に基づいて、前記点列の形式で前記移動物体に関する時系列の前記軌跡情報を生成する信号処理手段と
を備えることを特徴とする請求項1~7のうちいずれか1項に記載の航跡管理装置。
【請求項9】
コンピュータが、
点列の形式で移動物体に関する時系列の軌跡情報を取得し、
前記軌跡情報を第1関数の形式に変換し、予め登録された所定の式表現で表された複数の第2関数からいずれかの第2関数を取得し、前記第1関数の形式に変換された軌道情報である変換済軌跡情報と前記第2関数とに基づいて、前記変換済軌跡情報を前記第2関数の式表現に適合させた第3関数を決定し、決定した前記第3関数に基づいて前記移動物体に関する軌跡情報を推定し、
推定した前記軌跡情報を出力装置に出力する
ことを特徴とする航跡管理方法。
【請求項10】
コンピュータに、
点列の形式で移動物体に関する時系列の軌跡情報を取得する取得ステップと、
前記軌跡情報を第1関数の形式に変換し、予め登録された所定の式表現で表された複数の第2関数からいずれかの第2関数を取得し、前記第1関数の形式に変換された軌道情報である変換済軌跡情報と前記第2関数とに基づいて、前記変換済軌跡情報を前記第2関数の式表現に適合させた第3関数を決定し、決定した前記第3関数に基づいて前記移動物体に関する軌跡情報を推定する推定ステップと、
推定した前記軌跡情報を出力装置に出力する出力制御ステップと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、航跡管理装置、航跡管理方法、及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
移動体の軌跡情報を管理する技術として、例えば、以下の技術が開示されている。例えば、特許文献1では、センサーから受信したデータを、複数の運動モデルを用いたフィルタにより処理し、最も適合度の高いフィルタの処理結果を用いて、各時刻における移動体の位置と速度を推定する手法が開示されている。
【0003】
また、特許文献2では、産業用ロボットの動作経路を制御する際に、点列で与えられた経路情報から、連続曲線による経路情報を生成し、高精度なロボット制御を行う手法が開示されている。
【0004】
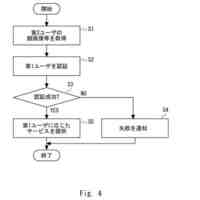
また、特許文献3では、軌道情報の利用例として味方領域に着弾する敵ミサイルの迎撃ミサイルによる撃破確率の算出手法及び、運動モデルから予測軌道を微分方程式の数値解法を用いて算出する手法について開示されている。
【先行技術文献】
【特許文献】
【0005】
特開平7-218611号公報
特開平3-245209号公報
特開平10-133558号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来、移動物体の追跡が長期間にわたる場合、軌道情報を点列の形式で管理及び配信しているため、移動物体の追跡時間に比例してデータ量が増大するため、通信ネットワーク及びデータ利用システムにおける負荷が増大していた。
【0007】
また、運動モデルが未知な移動物体の軌道予測を行った際、軌道予測全体の信頼性が低く留まっていた。その理由は、特定の運動モデルに基づいて予測を行った場合、実際の軌道とは大きく異なる予測を精度よく行ってしまい、精度の高い予測結果であっても十分に信頼できなくなってしまうためである。
【0008】
追跡または予測が長期にわたる移動物体の過去の軌跡及び将来の軌道に関する情報を転送する際のネットワーク負荷を抑制し、これらの情報を利用する下流システムにおける参照処理の負荷を削減するためには、次のことが求められる。すなわち、移動物体の過去の軌跡及び将来の軌道に関する情報を追跡または予測の期間によらない形式で転送する必要がある。
【0009】
また、移動物体の将来の軌道を予測する際の信頼度を向上させるためには、様々な運動モデルによる軌道予測を吟味することに加えて、いずれの運動モデルによる予測も適合しなかった際の将来軌道の暫定予測手法を用意しておく必要がある。
【0010】
特許文献1では、センサーからの信号を複数の追尾フィルタを用いて処理することで追尾精度を向上する手法が開示されている。しかしながら、特許文献1では、センサーが出力する移動物体の位置情報を転送及び参照する負荷を低減する手法については開示されておらず、追尾フィルタは運動モデルによる運動の記述が妥当であることを前提としている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
今日
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
今日
日本電気株式会社
ナノカーボン生成装置及びナノカーボン製造方法
今日
日本電気株式会社
原価管理システム、原価管理方法及びプログラム
今日
日本電気株式会社
プログラム、監視支援システムおよび監視支援方法
今日
日本電気株式会社
無線LAN端末、無線LAN基地局、及び方法
3日前
日本電気株式会社
情報処理装置、情報処理システム、情報処理方法、および情報処理プログラム
3日前
個人
集束超音波の測定機
24日前
個人
センサ制御回路
24日前
甲神電機株式会社
電流検出器
17日前
株式会社大真空
センサ
12日前
甲神電機株式会社
漏電検出器
17日前
甲神電機株式会社
電流センサ
17日前
東レ株式会社
液体展開用シート
4日前
ユニパルス株式会社
ロードセル
11日前
株式会社高橋型精
採尿具
18日前
株式会社トプコン
測量装置
17日前
ダイトロン株式会社
外観検査装置
24日前
学校法人東京電機大学
干渉計
25日前
アズビル株式会社
熱式流量計
18日前
株式会社トプコン
植物センサ
今日
株式会社クボタ
作業車両
3日前
キヤノン電子株式会社
サーボ加速度計
4日前
キヤノン電子株式会社
サーボ加速度計
4日前
キヤノン電子株式会社
サーボ加速度計
4日前
豊田合成株式会社
表示装置
17日前
日本特殊陶業株式会社
ガスセンサ
18日前
TDK株式会社
磁気センサ
24日前
シャープ株式会社
収納装置
18日前
株式会社ミトミ技研
圧力測定装置
24日前
トヨタ自動車株式会社
画像検査装置
12日前
株式会社JVCケンウッド
撮像装置
25日前
エスペック株式会社
試験装置
25日前
株式会社東京久栄
水中移動体用採水器
18日前
アズビル株式会社
ヒータ温度推定装置
25日前
株式会社島津製作所
ガスクロマトグラフ
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ