TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024142825
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055172
出願日
2023-03-30
発明の名称
プローバ
出願人
株式会社東京精密
代理人
スプリング弁理士法人
主分類
H01L
21/66 20060101AFI20241003BHJP(基本的電気素子)
要約
【課題】プローブの先端の位置を迅速に検出することができるプローバを提供する。
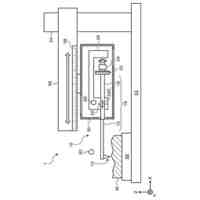
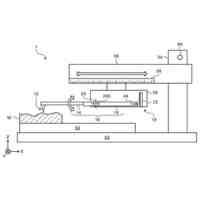
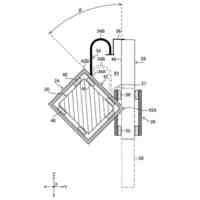
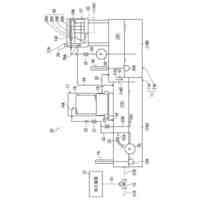
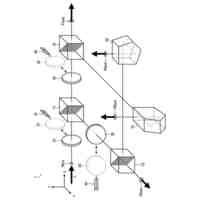
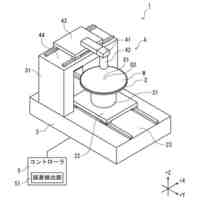
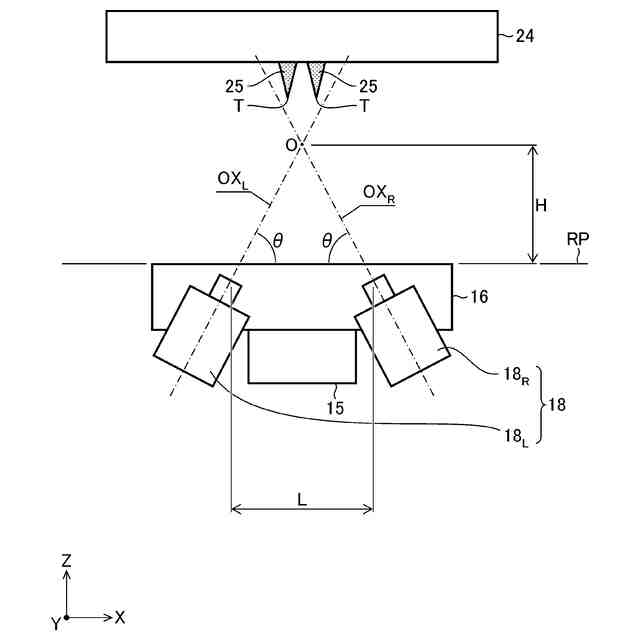
【解決手段】プローバ10は、ウェーハWを保持するウェーハチャック16と、ウェーハチャック16に対向する面にプローブ25を有するプローブカード24と、プローブカード24に対してウェーハチャック16を相対的に移動させる移動機構13,14,15と、2つのカメラ18
L
,18
R
を有し、2つのカメラ18
L
,18
R
でプローブ25を撮像するプローブ撮像ユニット18と、2つのカメラ18
L
,18
R
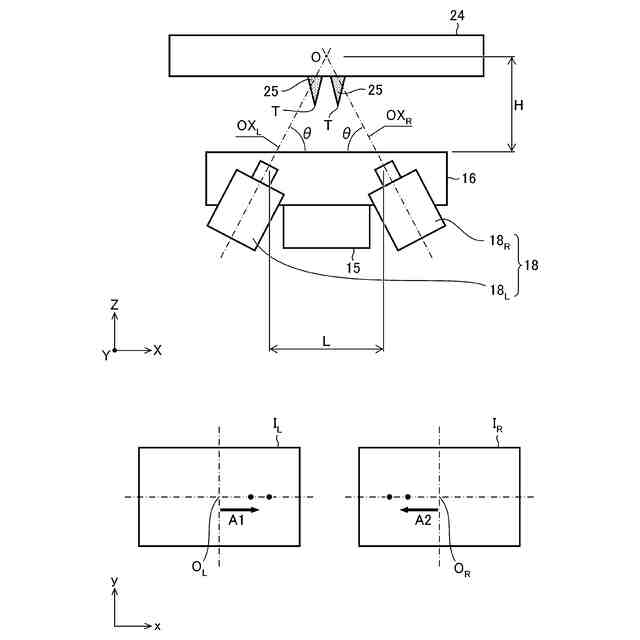
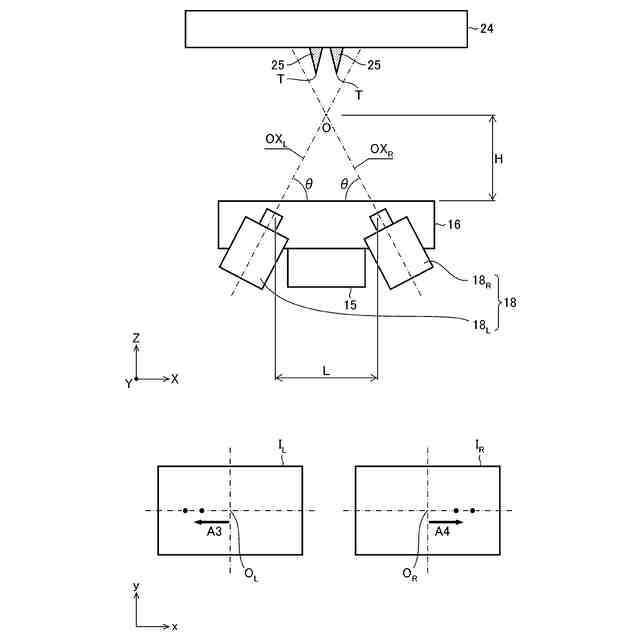
で撮像された2つの画像I
L
,I
R
に基づいて、プローブ25の先端Tの位置を検出するプローブ位置検出部27と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ウェーハを保持するウェーハチャックと、
前記ウェーハチャックに対向する面にプローブを有するプローブカードと、
前記プローブカードに対して前記ウェーハチャックを相対的に移動させる移動機構と、
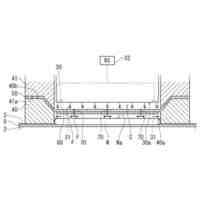
2つのカメラを有し、前記2つのカメラで前記プローブを撮像するプローブ撮像ユニットと、
前記2つのカメラで撮像された2つの画像に基づいて、前記プローブの先端の位置を検出するプローブ位置検出部と、
を備えるプローバ。
続きを表示(約 210 文字)
【請求項2】
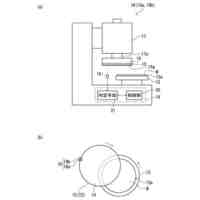
前記2つのカメラの撮影光軸は互いに交差する、
請求項1に記載のプローバ。
【請求項3】
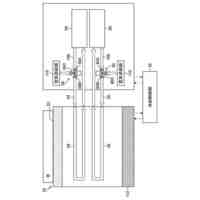
前記2つのカメラはそれぞれテレセントリック光学系により構成されたカメラである、
請求項2に記載のプローバ。
【請求項4】
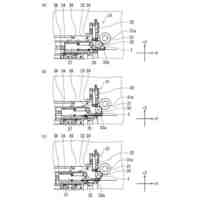
前記移動機構は、前記プローブカードに対して前記プローブ撮像ユニットを相対的に移動させる、
請求項1から3のいずれか1項に記載のプローバ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ウェーハ上に形成された半導体装置(チップ)の電気的特性の検査を行うプローバに関し、プローブの先端の位置を迅速に検出することができるプローバに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
半導体製造工程は、多数の工程を有し、品質保証及び歩留まりの向上のために、各種の製造工程で各種の検査が行われる。例えば、ウェーハ上に半導体装置を含む複数のチップが形成された段階で、各チップの電極パッドは、テスタに接続され、テスタから電源及びテスト信号が供給される。そして、各チップ上に形成された半導体装置から出力される信号は、テスタによって測定される。これにより、半導体装置が正常に動作するかを電気的に検査される(ウェーハレベル検査)。このウェーハレベル検査はプローバを用いて行われる。
【0003】
ウェーハレベル検査では、プローバに設置されたプローブカードのプローブ(触針)をチップ上の電極パッドに正確に接触させる必要がある。例えば、特許文献1に記載のプローブ装置(プローバ)は、プローブカードのプローブを下方から撮像する触針用光学装置(プローブ位置検出カメラ)を備え、プローブ位置検出カメラで撮像することによりプローブの先端を検出し、その検出結果に基づいてウェーハを載置するチャック部のZステージを駆動してプローブの先端を電極パッドに接触させる。
【先行技術文献】
【特許文献】
【0004】
特開2004-039752号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載されている技術では、Zステージを駆動してプローブ位置検出カメラを上下に動かしてプローブ位置検出カメラの焦点をプローブの先端に合わせることにより、プローブの先端の位置を検出している。特にプローブ位置検出カメラの焦点深度が浅い場合には、プローブとプローブ位置検出カメラとが衝突しないようにプローブカードとプローブ位置検出カメラとの相対距離を小刻みに変更しながらプローブ位置検出カメラの焦点をプローブの先端に合わせる必要がある。そのため、プローブの先端の位置を検出するために時間がかかるという問題がある。
【0006】
本発明は、このような事情に鑑みてなされたもので、プローブの先端の位置を迅速に検出することができるプローバを提供することを目的とする。
【課題を解決するための手段】
【0007】
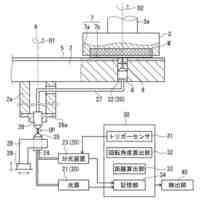
第1態様に係るプローバは、ウェーハを保持するウェーハチャックと、ウェーハチャックに対向する面にプローブを有するプローブカードと、プローブカードに対してウェーハチャックを相対的に移動させる移動機構と、2つのカメラを有し、2つのカメラで前記プローブを撮像するプローブ撮像ユニットと、2つのカメラで撮像された2つの画像に基づいて、プローブの先端の位置を検出するプローブ位置検出部と、を備える。
【0008】
第1態様に係るプローバにおいて、2つのカメラで撮像された画像に基づいて、プローブの先端の位置を検出することができる。プローブ位置検出カメラの焦点合わせに要する時間が実質的にないため、プローブの先端の位置を迅速に検出することが可能となる。
【0009】
好ましくは、2つのカメラの撮影光軸は互いに交差する。これにより、プローブ位置検出部は、比較的容易な幾何学的演算を用いてプローブの先端の位置を検出することができる。
【0010】
より好ましくは、2つのカメラはそれぞれテレセントリック光学系により構成されたカメラである。2つのカメラがテレセントリック光学系を有するため、撮像された画像におけるプローブの先端の大きさ(撮影倍率)はカメラから先端までの距離にほとんど依存せず、ほぼ一定である。そのため、プローブ位置検出部は、画像上でのプローブの先端の位置に基づいて比較的容易な演算で実空間でのプローブの先端の位置を検出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東京精密
研削装置
25日前
株式会社東京精密
測定装置
17日前
株式会社東京精密
測定装置
17日前
株式会社東京精密
測定装置
17日前
株式会社東京精密
プローバ
10日前
株式会社東京精密
研削装置
25日前
株式会社東京精密
測定装置
17日前
株式会社東京精密
プローバ
3日前
株式会社東京精密
プローバ
3日前
株式会社東京精密
CMP装置
13日前
株式会社東京精密
シート剥離装置
10日前
株式会社東京精密
ワーク加工装置
14日前
株式会社東京精密
三次元座標測定機
14日前
株式会社東京精密
配管の断熱構造体
4日前
株式会社東京精密
三次元座標測定機
14日前
株式会社東京精密
充放電試験システム
3日前
株式会社東京精密
三次元座標測定装置
14日前
株式会社東京精密
加工用排液濾過装置
5日前
株式会社東京精密
測定装置及び測定方法
10日前
株式会社東京精密
研削装置及び研削方法
4日前
株式会社東京精密
ウェーハ冷却システム
4日前
株式会社東京精密
ウェハ保護テープ剥離装置
24日前
株式会社東京精密
光路切替装置及び測定装置
1か月前
株式会社東京精密
加工装置及び画像処理方法
10日前
株式会社東京精密
リテーナリングの組立方法
4日前
株式会社東京精密
プローブ及び形状測定装置
4日前
株式会社東京精密
研磨装置の保持面加工方法
17日前
株式会社東京精密
半導体ウェーハ研削砥石装置
17日前
株式会社東京精密
ワーク外観検査装置及び方法
10日前
株式会社東京精密
亀裂検出装置及びその診断方法
1か月前
株式会社東京精密
プローバ及びウェーハ搬送方法
3日前
株式会社東京精密
プローバ及びプローブ検査方法
3日前
株式会社東京精密
ワークアライメント装置及び方法
17日前
株式会社東京精密
研磨終点検出装置及びCMP装置
14日前
株式会社東京精密
オートフォーカス装置及び光学装置
4日前
株式会社東京精密
溝形状測定方法及び溝形状測定装置
3日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ