TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024129745
公報種別
公開特許公報(A)
公開日
2024-09-27
出願番号
2023039142
出願日
2023-03-13
発明の名称
ワークアライメント装置及び方法
出願人
株式会社東京精密
代理人
個人
主分類
G01B
11/00 20060101AFI20240919BHJP(測定;試験)
要約
【課題】チャックテーブルとワークとの相対的な位置関係を簡便に検出するワークアライメント装置及び方法を提供する。
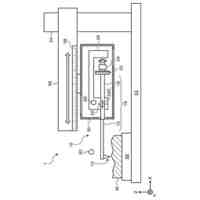
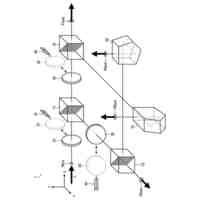
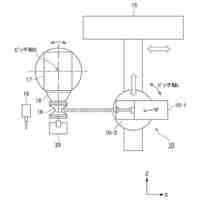
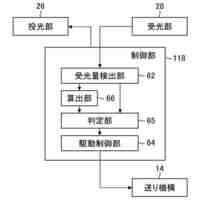
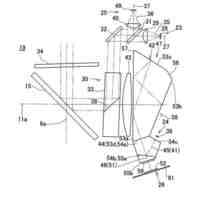
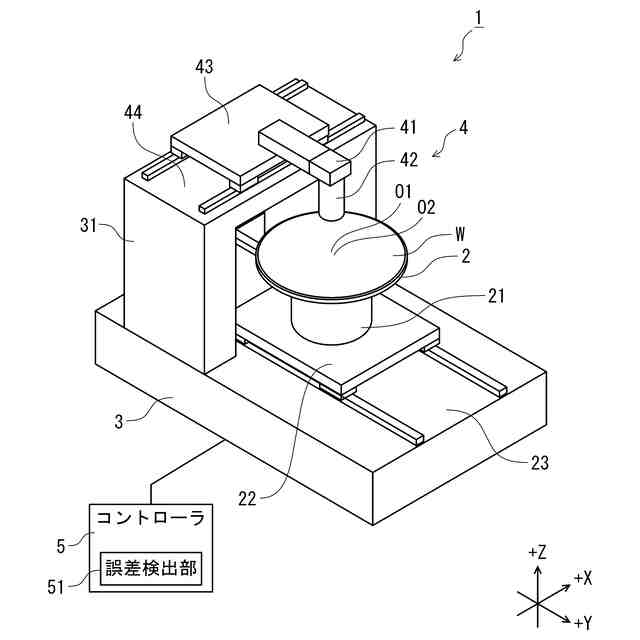
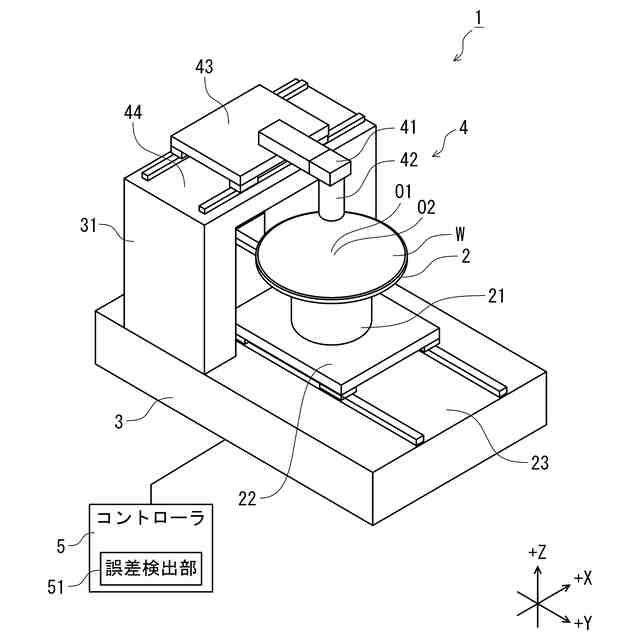
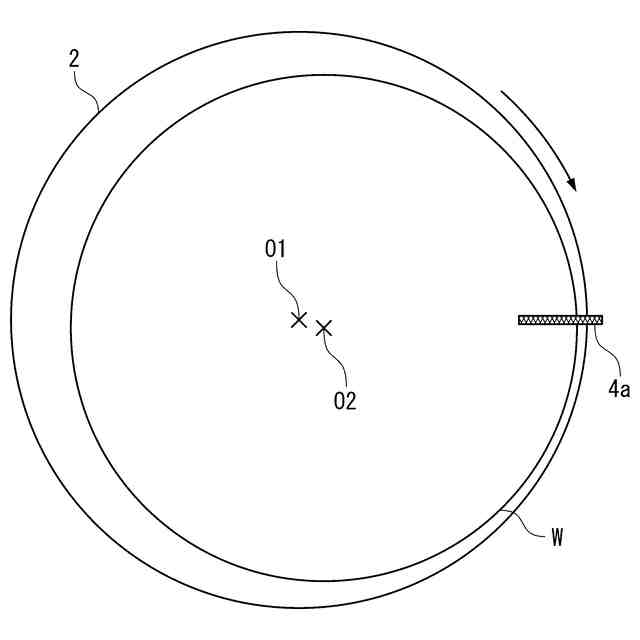
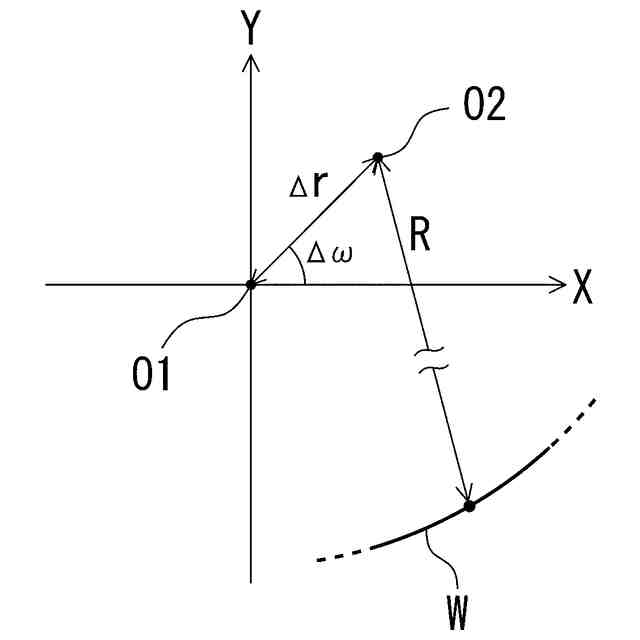
【解決手段】ワークアライメント装置1は、チャックテーブル2に保持された回転状態のワークWのエッジ全周を撮像するカメラ4と、カメラ4が撮像した撮像画像からエッジの位置を全周に亘って検出し、エッジの位置をチャックテーブル2の所定回転角度おきにサンプリングし、チャックテーブル2の回転角度とエッジの位置との関係を示すエッジトレンド線の座標関数を導出し、座標関数をフーリエ変換してチャックテーブル2の回転中心O1に対するワークWの中心O2の配置誤差を検出する誤差検出部51と、を備えている。
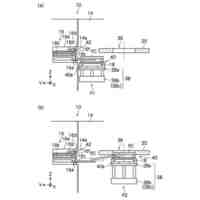
【選択図】図1
特許請求の範囲
【請求項1】
チャックテーブルと前記チャックテーブルに載置された略円形状のワークとの相対的な位置関係を検出するワークアライメント装置であって、
前記チャックテーブルに保持された回転状態の前記ワークのエッジ全周を撮像する撮像部と、
前記撮像部が撮像した撮像画像から前記エッジの位置を全周に亘って検出し、前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングし、前記チャックテーブルの回転角度と前記エッジの位置との関係を示す関係式を導出し、前記関係式を高速フーリエ変換して前記チャックテーブルの回転中心に対する前記ワークの中心の相対的な位置関係である配置誤差を検出する誤差検出部と、
を備えているワークアライメント装置。
続きを表示(約 600 文字)
【請求項2】
前記誤差検出部は、前記ワークの外周に形成されたノッチを除くように設定された前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングして前記関係式を導出することを特徴とする請求項1に記載のワークアライメント装置。
【請求項3】
チャックテーブルと前記チャックテーブルに載置された略円形状のワークとの相対的な位置関係を検出するワークアライメント方法であって、
前記チャックテーブルに保持された回転状態の前記ワークのエッジ全周を撮像部が撮像する撮像工程と、
前記撮像部が撮像した撮像画像から前記エッジの位置を全周に亘って検出し、前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングし、前記チャックテーブルの回転角度と前記エッジの位置との関係を示す関係式を導出し、前記関係式を高速フーリエ変換して前記チャックテーブルの回転中心に対する前記ワークの中心の相対的な位置関係である配置誤差を検出する誤差検出工程と、
を含むことを特徴とするワークアライメント方法。
【請求項4】
前記誤差検出工程では、前記ワークの外周に形成されたノッチを除くように設定された前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングして前記関係式を導出することを特徴とする請求項3に記載のワークアライメント方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、チャックテーブルと略円形状のワークとの相対的な位置関係を検出するワークアライメント装置及び方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
半導体シリコンウェハ等(以下、「ワーク」という)の加工や検査は、搬送ロボットによりチャックテーブルに受け渡されたワークをチャックテーブルが保持した状態で行われる。しかしながら、加工や検査時に要求されるチャックテーブルに対するワークの位置精度に対して、搬送ロボットがワークをチャックテーブルに受け渡す際の位置精度が十分でない場合があり、チャックテーブルに対するワークの相対的な位置関係(配置ずれ)を検出する必要がある。
【0003】
特許文献1には、ワークの外周部の異なる複数の箇所においてエッジに対応する可能性のある点の座標を算出し、算出された全ての点の座標に対して最小二乗法を用いて作成された近似円と各点の座標とのずれ量を算出し、ずれ量が予め設定した閾値以上である座標が存在する場合には、ずれ量が最大の座標を誤検出位置と判定し、誤検出位置と判定された座標を考慮対象から除外し、除外されずに残った3個以上の座標からワークのエッジの位置を推定するエッジアライメント方法が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-150416号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載のエッジアライメント方法では、エッジ位置を精度良く推定するために多数の点で座標を算出する必要があり、煩雑な演算処理を要する虞があった。
【0006】
また、ワーク全体の撮像に好適なものとして、連続的に撮像位置を掃引可能なラインスキャンカメラが知られている。このようなラインスキャンカメラを用いて任意の位置を選択的に撮像する場合、ラインスキャンカメラを任意の位置に配置するために複雑な軸制御を組み合わせなければならず、また高頻度の加減速を伴うため振動を正確に制御することが要求される。そのため、ラインスキャンカメラのみを撮像手段とする検査装置に特許文献1記載のエッジアライメント方法を適用すると、処理速度が低下したり製造コストが過度に増加する虞があった。
【0007】
そこで、チャックテーブルとワークとの相対的な位置関係を簡便に検出するために解決すべき技術的課題が生じてくるのであり、本発明はこの課題を解決することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係るワークアライメント装置は、チャックテーブルと前記チャックテーブルに載置された略円形状のワークとの相対的な位置関係を検出するワークアライメント装置であって、前記チャックテーブルに保持された回転状態の前記ワークのエッジ全周を撮像する撮像部と、前記撮像部が撮像した撮像画像から前記エッジの位置を全周に亘って検出し、前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングし、前記チャックテーブルの回転角度と前記エッジの位置との関係を示す関係式を導出し、前記関係式を高速フーリエ変換して前記チャックテーブルの回転中心に対する前記ワークの中心の相対的な位置関係である配置誤差を検出する誤差検出部と、を備えている。
【0009】
また、本発明に係るワークアライメント方法は、チャックテーブルと前記チャックテーブルに載置された略円形状のワークとの相対的な位置関係を検出するワークアライメント方法であって、前記チャックテーブルに保持された回転状態の前記ワークのエッジ全周を撮像する撮像工程と、前記撮像部が撮像した撮像画像から前記エッジの位置を全周に亘って検出し、前記エッジの位置を前記チャックテーブルの所定回転角度おきにサンプリングし、前記チャックテーブルの回転角度と前記エッジの位置との関係を示す関係式を導出し、前記関係式を高速フーリエ変換して前記チャックテーブルの回転中心に対する前記ワークの中心の相対的な位置関係である配置誤差を検出する誤差検出工程と、を含む。
【発明の効果】
【0010】
本発明は、チャックテーブルとワークとの相対的な位置関係を簡便に検出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東京精密
研削装置
8日前
株式会社東京精密
研削装置
8日前
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
光路切替装置及び測定装置
15日前
株式会社東京精密
研磨装置の保持面加工方法
今日
株式会社東京精密
ウェハ保護テープ剥離装置
7日前
株式会社東京精密
半導体ウェーハ研削砥石装置
今日
株式会社東京精密
亀裂検出装置及びその診断方法
21日前
株式会社東京精密
ワークアライメント装置及び方法
今日
株式会社東京精密
研削砥石のツルーイング装置及び方法
18日前
株式会社東京精密
研削砥石のツルーイング装置及び方法
24日前
株式会社東京精密
研削砥石のツルーイング方法及びツルーイング装置
7日前
株式会社東京精密
加工装置、方法、及び、学習済みモデルの生成方法
24日前
株式会社東京精密
プローブ校正方法、プログラム、制御装置及び測定装置
8日前
株式会社東京精密
ウェーハの面取り加工方法及びそれに用いられる面取り装置
7日前
株式会社東京精密
搬送ユニット
9日前
株式会社東京精密
ブレード検出装置
7日前
株式会社東京精密
加工システム及び方法
17日前
株式会社東京精密
亀裂検出装置及び方法
24日前
日本精機株式会社
表示装置
今日
株式会社コロナ
石油ストーブ
7日前
個人
電気抵抗の測定方法
15日前
株式会社ヨコオ
プローブ
今日
太陽誘電株式会社
センサ
3日前
太陽誘電株式会社
検出装置
18日前
株式会社トプコン
測量装置
7日前
北陽電機株式会社
光電センサ
14日前
CKD株式会社
錠剤検査装置
22日前
日本碍子株式会社
ガスセンサ
28日前
個人
変位測定装置
今日
株式会社東芝
センサ
18日前
個人
二次電池繰返パルス放電器用基板
今日
株式会社キーエンス
超音波流量センサ
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ