TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142749
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055057
出願日
2023-03-30
発明の名称
自律走行ロボット
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G05D
1/43 20240101AFI20241003BHJP(制御;調整)
要約
【課題】安全柵が設けられていない走行通路にも配設でき且つ配設コストを低減できるランドマークを用いて自己位置を推定可能な自律走行ロボットを提供する。
【解決手段】自律走行ロボットは、物体の反射点によって反射された反射光を受光することにより反射点の位置に関する情報を含む検出データを取得するセンサを備え、検出データに基いて自己位置を推定して自律走行する。自律走行ロボットの走行通路を区画する側壁には、少なくとも一つの非検出領域が配設され、非検出領域は、光の反射を抑制することによりセンサが反射点の位置を検出できなくなる黒色物体が貼られた領域、又は、光の反射を抑制することによりセンサが反射点の位置を検出できなくなる塗料が塗られた領域である。自律走行ロボットは、検出データと予め記憶されたマップデータとに基いて、自己位置を推定する。
【選択図】 図2
特許請求の範囲
【請求項1】
光を照射し、物体の反射点によって前記光が反射された反射光を受光することにより前記反射点の位置に関する情報を含む検出データを取得するセンサを備え、前記検出データに基いて自己位置を推定して自律走行する自律走行ロボットにおいて、
前記自律走行ロボットの走行通路を区画する側壁には、少なくとも一つの非検出領域が配設され、
前記非検出領域は、前記光の反射を抑制することにより前記センサが前記反射点の位置を検出できなくなる黒色物体が貼られた領域、又は、前記光の反射を抑制することにより前記センサが前記反射点の位置を検出できなくなる塗料が塗られた領域であり、
前記自律走行ロボットは、
前記自律走行ロボットが走行するエリアの前記検出データと、前記検出データの取得位置とを対応付けたマップデータを予め記憶しており、
前記検出データと前記マップデータとに基いて、前記自己位置を推定するように構成された、自律走行ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、照射した光の反射点の位置に関する情報を含む検出データに基いて自己位置を推定して自律走行する自律走行ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、自己位置を推定して自律走行する自律走行ロボットが知られている。例えば、特許文献1に記載の自律走行ロボット(以下、「従来ロボット」と称呼する。)は、従来ロボットの走行通路の両脇に設けられた安全柵に左右千鳥状に配設されたT字型ランドマークを測距センサを利用して検出し、検出したT字型ランドマークの位置及び向きに基いて自己位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2016-152004号公報
【発明の概要】
【0004】
T字型ランドマークは走行通路の両脇に設けられた安全柵に配設されるが、T字型ランドマークは、安全柵に設けられていない走行通路に配設できない可能性がある。更に、T字型ランドマークを配設するための配設コストも高くなる可能性がある。
【0005】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、安全柵が設けられていない走行通路にも配設でき且つ配設コストを低減できるランドマークを用いて自己位置を推定可能な自律走行ロボットを提供することにある。
【0006】
本発明の車両制御装置(以下、「本発明装置」と称呼する。)は、
光を照射し、物体の反射点によって前記光が反射された反射光を受光することにより前記反射点の位置に関する情報を含む検出データを取得するセンサ(22)を備え、前記検出データに基いて自己位置を推定して自律走行する自律走行ロボット(10)において、
前記自律走行ロボットの走行通路を区画する側壁には、少なくとも一つの非検出領域(40a乃至40d)が配設され、
前記非検出領域は、前記光の反射を抑制することにより前記センサが前記反射点の位置を検出できなくなる黒色物体が貼られた領域、又は、前記光の反射を抑制することにより前記センサが前記反射点の位置を検出できなくなる塗料が塗られた領域であり、
前記自律走行ロボットは、
前記自律走行ロボットが走行するエリアの前記検出データと、前記検出データの取得位置とを対応付けたマップデータを予め記憶しており(28a)、
前記自己位置を推定する場合に取得した検出データと前記マップデータとに基いて、前記自己位置を推定するように構成されている(ステップ310)。
【0007】
非検出領域は上記黒色物体が貼られた領域又は上記塗料が塗られた領域であるので、安全柵が配設されていない走行通路にも配設することができ、更に、T字型ランドマークよりも安価に配設することができる。本発明装置は、検出データとその検出データの取得位置とを対応付けたマップデータを予め記憶しており、自己位置を推定する場合に取得した検出データとマップデータとに基いて自己位置を推定する。本発明装置は、検出データ及びマップデータにおいて非検出領域の位置に基いて自己位置を推定できる。特徴のある物体が存在しない走行通路に非検出領域が配設されていれば、本発明装置は、正確に自己位置を推定できる。
【図面の簡単な説明】
【0008】
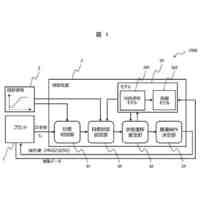
本発明の実施形態に係る自律走行ロボットの概略構成図である。
本発明の実施形態に係る非検出領域の配設例の説明図である。
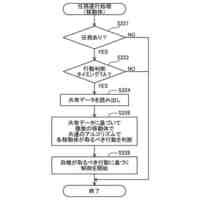
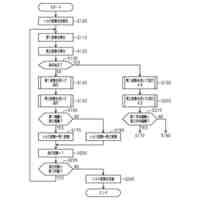
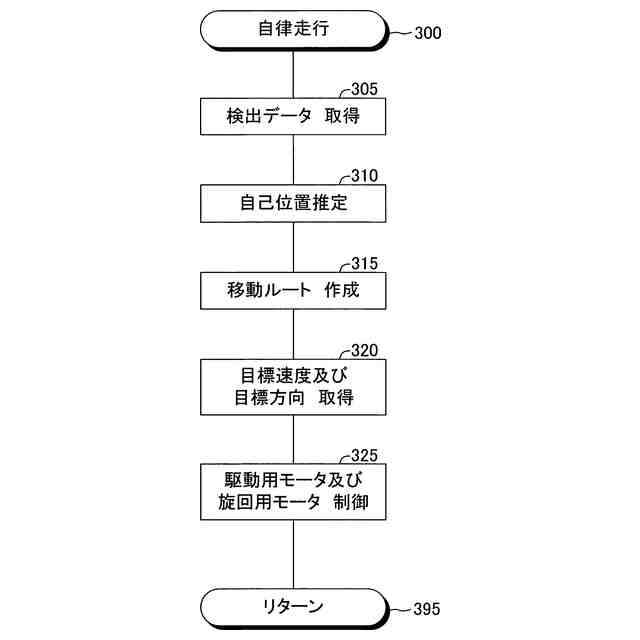
図1に示したECUのCPUが実行する自律走行ルーチンのフローチャートである。
【発明を実施するための形態】
【0009】
本実施形態に係る自律走行ロボット10(以下、「本ロボット10」と称呼する。)は、図1に示した構成要素を備える。本ロボット10は、自己位置を推定して目的地まで自律走行する。
【0010】
ECU20は、本ロボット10を目的地まで自律走行させる自律走行制御を実行する。ECU20は、マイクロコンピュータを主要部として備える電子式制御装置である。ECUはコントローラ又はコンピュータとも称呼される。マイクロコンピュータは、CPU(プロセッサ)、ROM、RAM及びインタフェース(I/F)等を含む。ECU20の少なくとも一つの機能は、複数のECUによって実現されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
自動走行体
24日前
株式会社豊田自動織機
無人走行体
13日前
エイブリック株式会社
基準電圧回路
2日前
アズビル株式会社
設定システム
3日前
株式会社熊谷組
巡回ルート作成装置
2日前
オムロン株式会社
自律作業システム
13日前
株式会社ダイヘン
電力変換装置
4日前
エイブリック株式会社
シャントレギュレータ
9日前
株式会社ダイヘン
電力変換装置
4日前
エイブリック株式会社
ボルテージレギュレータ
6日前
オムロン株式会社
設計装置および設計方法
13日前
東芝ライテック株式会社
管理システム
9日前
株式会社FUJI
作業機の操作表示システム
3日前
株式会社デンソー
電子制御装置
23日前
株式会社ダイフク
物品搬送設備
13日前
株式会社フカデン
外周部加工システム
1か月前
日立建機株式会社
自律走行システム
1か月前
株式会社デンソー
移動体制御装置
1か月前
アズビル株式会社
診断システムおよび診断方法
9日前
株式会社栗本鐵工所
触覚提示装置
3日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
2日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
株式会社藤千商会
移動体制御システムおよび移動体
12日前
ローム株式会社
リニア電源回路
9日前
株式会社日立製作所
制御装置、制御方法
2日前
トヨタ自動車株式会社
ソーラー充電システム
9日前
株式会社ダイフク
搬送設備の検査装置
1か月前
東レエンジニアリング株式会社
位置決め装置
4日前
東レエンジニアリング株式会社
位置決め装置
3日前
ルネサスエレクトロニクス株式会社
レギュレータ回路
13日前
マツダ株式会社
車両用演算装置
4日前
川崎重工業株式会社
電気操作装置
9日前
川崎重工業株式会社
電気操作装置
9日前
トヨタ自動車株式会社
適合システム及び適合方法
1か月前
ローム株式会社
カレントミラー回路
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ