TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024142741
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055045
出願日
2023-03-30
発明の名称
ロボットハンド
出願人
三井化学株式会社
代理人
弁理士法人鷲田国際特許事務所
主分類
B25J
15/08 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物に応じた表面物性を有するフィンガを備えるロボットハンドを提供する。
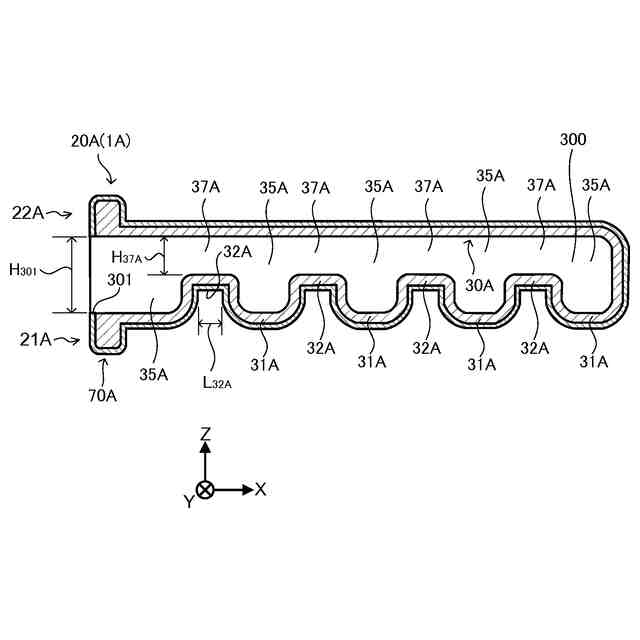
【解決手段】ロボットハンドは、流体により変形する少なくとも1つのフィンガを備え、フィンガにより対象物に対して作業を行うロボットハンドであって、フィンガは、流体が供給される内部空間を有するフィンガ本体と、フィンガ本体の材料とは異なる材料からなり、フィンガ本体の表面において少なくとも対象物と接触しうる面に設けられたラミネート層と、を有する。
【選択図】図18
特許請求の範囲
【請求項1】
流体により変形する少なくとも1つのフィンガを備え、前記フィンガにより対象物に対して作業を行うロボットハンドであって、
前記フィンガは、
前記流体が供給される内部空間を有するフィンガ本体と、
前記フィンガ本体の材料とは異なる材料からなり、前記フィンガ本体の表面において少なくとも前記対象物と接触しうる面に設けられたラミネート層と、を有する、
ロボットハンド。
続きを表示(約 240 文字)
【請求項2】
前記ラミネート層は、オレフィン系フィルムからなる、
請求項1に記載のロボットハンド。
【請求項3】
前記フィンガ本体の内部空間は、複数の部屋と、隣り合う前記部屋同士を連通する複数の通路と、を含む、
請求項1に記載のロボットハンド。
【請求項4】
前記複数の部屋のそれぞれに設けられ、前記内部空間内の前記流体の圧力が変化しても変形しない剛性を有するブロックを、更に備える、
請求項1に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットハンドに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、流体圧によって形状が変化するフィンガを備えるロボットハンドが提案されている。そのようなロボットハンドは、例えば特許文献1および特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2018-512304号公報
特表2020-518478号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述のようなロボットハンドは、用途に応じて、把持する対象物が変わる。このため、ロボットハンドは、対象物に応じた表面物性を有していることが望ましい。
【0005】
本開示の目的は、対象物に応じた表面物性を有するフィンガを備えるロボットハンドを提供することである。
【課題を解決するための手段】
【0006】
本開示に係るロボットハンドの一態様は、
流体により変形する少なくとも1つのフィンガを備え、フィンガにより対象物に対して作業を行うロボットハンドであって、
フィンガは、
流体が供給される内部空間を有するフィンガ本体と、
フィンガ本体の材料とは異なる材料からなり、フィンガ本体の表面において少なくとも対象物と接触しうる面に設けられたラミネート層と、を有する。
【発明の効果】
【0007】
本開示によれば、対象物に応じた表面物性を有するフィンガを備えるロボットハンドを提供することができる。
【図面の簡単な説明】
【0008】
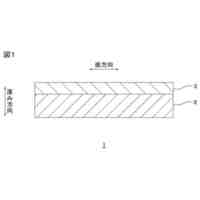
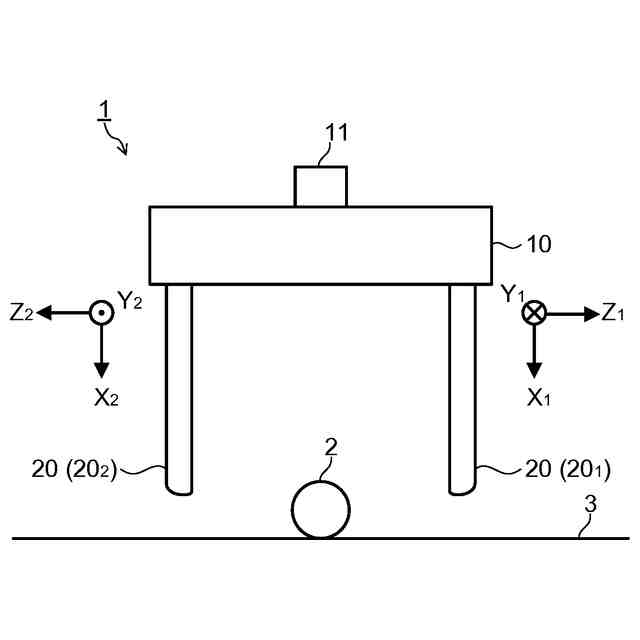
図1は、本発明の実施形態1に係るロボットハンドの模式図である。
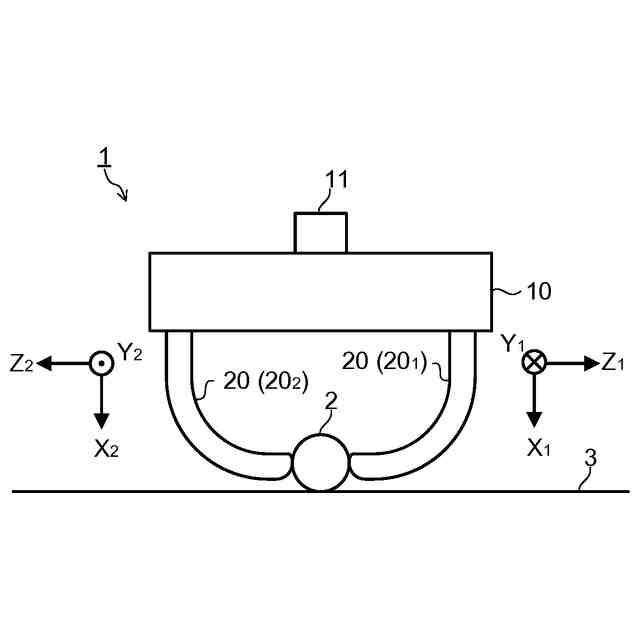
図2は、対象物を把持している状態におけるロボットハンドの模式図である。
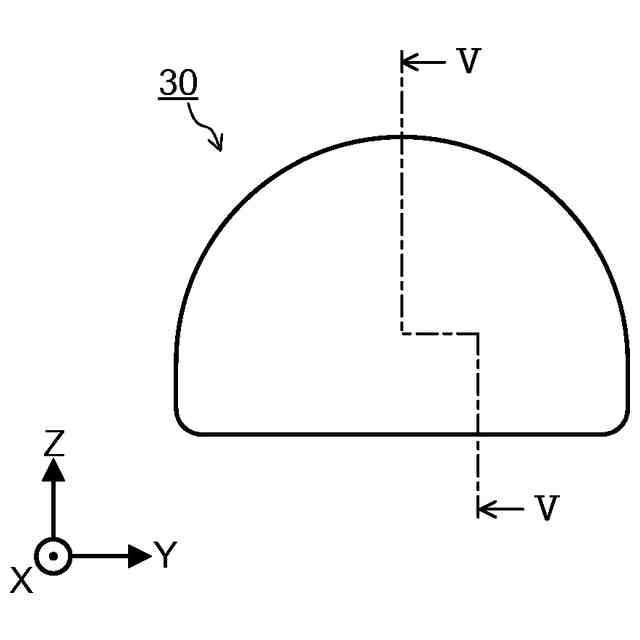
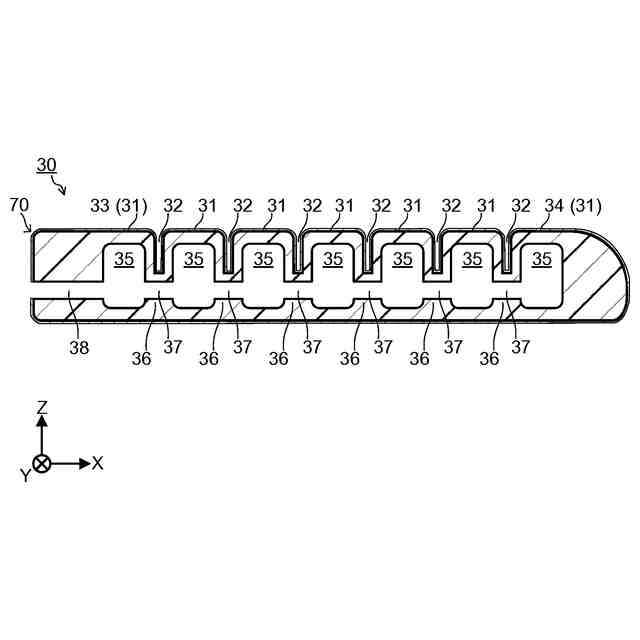
図3は、シースの正面図である。
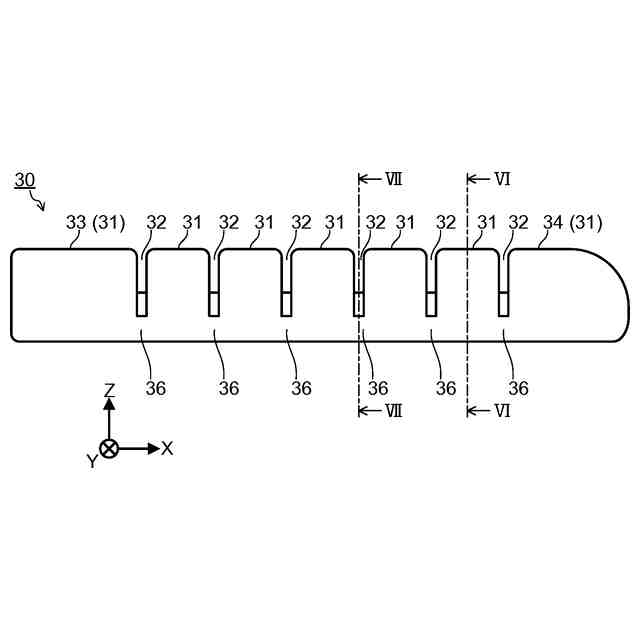
図4は、シースの側面図である。
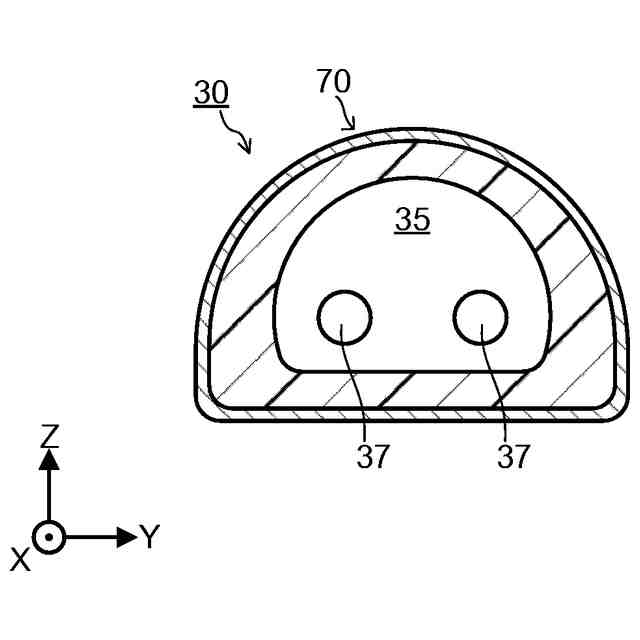
図5は、図3におけるV-V断面矢視図である。
図6は、図4におけるVI-VI断面矢視図である。
図7は、図4におけるVII-VII断面矢視図である。
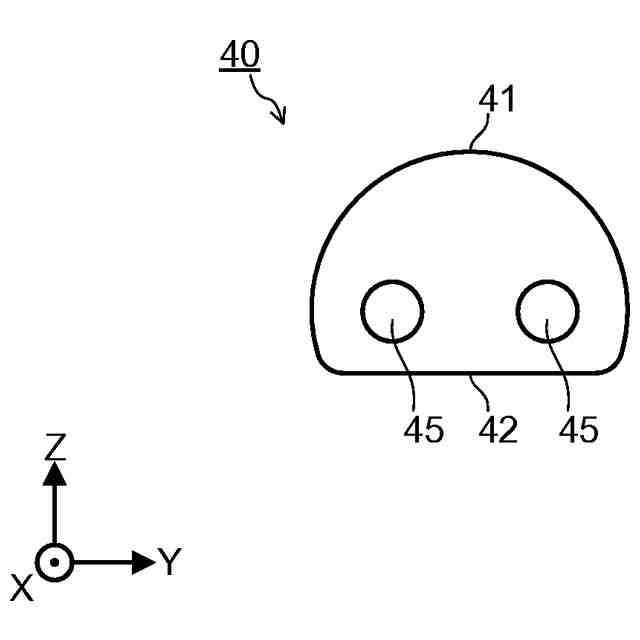
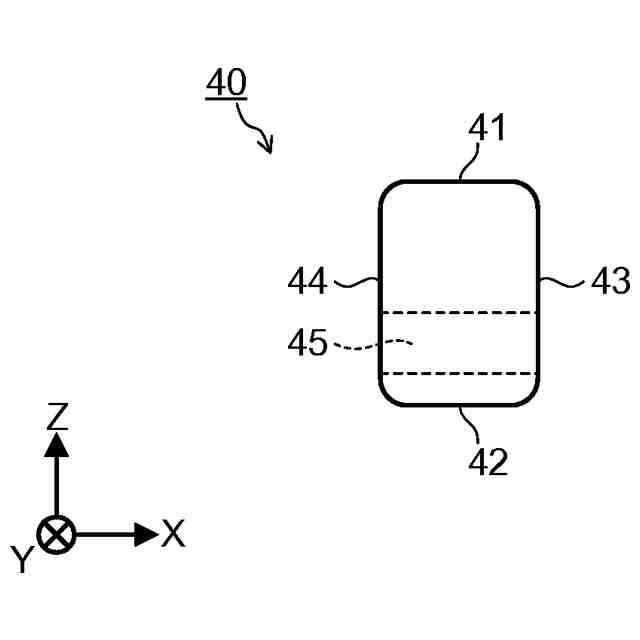
図8は、ブロックの正面図である。
図9は、ブロックの側面図である。
図10は、フィンガの断面図である。
図11は、曲がった状態のフィンガの断面図である。
図12は、ロボットハンドの製造工程を示す図である。
図13は、ロボットハンドの製造工程を示す図である。
図14は、ロボットハンドの製造工程を示す図である。
図15は、ロボットハンドの製造工程を示す図である。
図16は、ロボットハンドの製造工程を示す図である。
図17は、図12~図15に示す製造工程により製造されたフィンガの平面図である。
図18は、本発明の実施形態2に係るロボットハンドのフィンガの断面図である。
図19は、本発明の実施形態2に係るロボットハンドの製造工程を示す図である。
図20は、ロボットハンドの製造工程を示す図である。
図21は、ロボットハンドの製造工程を示す図である。
図22は、ロボットハンドの製造工程を示す図である。
図23は、ロボットハンドの製造工程を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態に係るロボットハンドおよびその製造方法について、図面を参照しながら説明する。以下に示す実施形態はあくまでも例示に過ぎない。本開示は、以下の実施形態で明示しない種々の変形や技術の適用を排除するものではない。
【0010】
なお、実施形態を説明するための全図において、同一要素は原則として同一の符号を付し、その説明を省略することもある。また、各図面の間において縮尺は必ずしも一致しない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三井化学株式会社
防音構造体
2日前
三井化学株式会社
遮音構造体
3日前
三井化学株式会社
粘着性組成物
3日前
三井化学株式会社
ロボットハンド
2日前
三井化学株式会社
電磁波吸収シート
3日前
三井化学株式会社
3次元造形物の製造方法
2日前
三井化学株式会社
容器入り製剤および包装体
2日前
三井化学株式会社
オレフィン重合体の製造方法
2日前
三井化学株式会社
オレフィン重合体の製造方法
2日前
三井化学株式会社
オレフィン重合体の製造方法
2日前
三井化学株式会社
環状オレフィン重合体の製造方法
2日前
三井化学株式会社
共重合体組成物、およびその用途
3日前
三井化学株式会社
移動体、電池筐体および電池ユニット
3日前
三井化学株式会社
複合材用原料、および、複合材の製造方法
2日前
三井化学株式会社
シール部品用共重合体組成物、およびその用途
3日前
三井化学株式会社
コンベアベルト用共重合体組成物およびその用途
3日前
三井化学株式会社
水系コート組成物、ヒートシール層用組成物および積層体
3日前
三井化学株式会社
水分散性ブロックイソシアネート、接着剤および繊維処理剤
3日前
三井化学株式会社
組成物、アンダーコート層、電極、リチウムイオン二次電池
3日前
三井化学株式会社
組成物、アンダーコート層、電極、リチウムイオン二次電池
3日前
三井化学株式会社
樹脂組成物、フィルム、多層フィルム、積層体、および包装体
3日前
三井化学株式会社
樹脂組成物、フィルム、多層フィルム、積層体、および包装体
3日前
セイコーエプソン株式会社
インクジェットインク組成物及び記録方法
4日前
三井化学株式会社
遷移金属化合物、オレフィン重合用触媒およびオレフィン重合体の製造方法
3日前
三井化学株式会社
(メタ)アクリレート化合物、モノマー組成物、重合性組成物、硬化物及び歯科材料
3日前
三井化学株式会社
エチレン・α-オレフィン・非共役ポリエン共重合体、その製造方法ならびにそれを含む組成物
3日前
三井化学株式会社
電池用非水電解液、リチウム二次電池前駆体、リチウム二次電池及びリチウム二次電池の製造方法
3日前
三井化学株式会社
成形体の製造方法、光透過性樹脂組成物を得るための組成物のセット、光透過性樹脂組成物及びキット
3日前
三井化学株式会社
有機金属錯体、重合用触媒、オレフィン重合体の製造方法、および、オレフィン・環状オレフィン共重合体の製造方法
2日前
個人
木製ハンマー
1か月前
個人
関節モジュール
1か月前
個人
寸切りボルト回し
1か月前
個人
スロットルトリガー
1か月前
日東精工株式会社
搬送装置
6か月前
中国電力株式会社
腰袋
4か月前
株式会社ツノダ
挟持工具
6か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ