TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024133856
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023043852
出願日
2023-03-20
発明の名称
同期PWM制御の位相補正装置および位相補正方法
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
H02M
7/48 20070101AFI20240926BHJP(電力の発電,変換,配電)
要約
【課題】同期PWM制御による運転中に、出力電圧指令とキャリア周波数の位相誤差を解消し同期状態を保つことができる位相補正装置を提供する。
【解決手段】同期PWM制御により運転中の電力変換器の出力電圧指令の位相θ
V
と、同期PWM制御におけるキャリア周波数f
C
のキャリア信号の位相との誤差を検出する位相誤差検出部と、前記検出した位相誤差が設定した閾値を超えたときに、当該位相誤差を補正する第1の位相補正用キャリア周波数f
cθ
を演算する第1のキャリア周波数演算部と、同期PWM制御による運転中は同期PWM制御におけるキャリア周波数f
C
を設定し、前記検出した位相誤差が設定した閾値を超えた場合に、前記キャリア信号のキャリア周波数を、設定した期間前記第1の位相補正用キャリア周波数f
cθ
に設定変更し、出力電圧指令の1周期あたりのキャリア信号のパルス数Kp周期経過後に、再び前記キャリア周波数f
C
に戻す。
【選択図】 図5
特許請求の範囲
【請求項1】
出力電圧指令とキャリア信号の位相を同期させる同期PWM制御がなされる単相又は三相の電力変換器において、
同期PWM制御により運転中の電力変換器の出力電圧指令の位相と、同期PWM制御におけるキャリア周波数のキャリア信号の位相との誤差を検出する位相誤差検出部と、
前記検出した位相誤差が設定した閾値を超えたときに、当該位相誤差を補正する第1の位相補正用キャリア周波数を演算する第1のキャリア周波数演算部と、
同期PWM制御による運転中は同期PWM制御におけるキャリア周波数を設定し、前記検出した位相誤差が設定した閾値を超えた場合に、前記キャリア信号のキャリア周波数を、設定した期間前記第1の位相補正用キャリア周波数に設定変更するキャリア周波数設定部と、
を備えたことを特徴とする同期PWM制御の位相補正装置。
続きを表示(約 4,900 文字)
【請求項2】
前記演算された第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えているか否かを判定し、上限を超えている場合に、前記位相誤差を補正する、電力変換器のキャリア周波数の上限を超えない第2の位相補正用キャリア周波数を演算する第2のキャリア周波数演算部を備え、
前記キャリア周波数設定部は、前記第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えていない場合は前記キャリア信号のキャリア周波数を、設定した期間前記第1の位相補正用キャリア周波数に設定変更し、前記第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えている場合は前記キャリア信号のキャリア周波数を、設定した期間前記第2の位相補正用キャリア周波数に設定変更することを特徴とする請求項1に記載の同期PWM制御の位相補正装置。
【請求項3】
前記演算された第1の位相補正用キャリア周波数と前記キャリア周波数設定部に設定されているキャリア周波数との差が、設定した変化幅制限値を超えているか否かを判定し、変化幅制限値を超えている場合は、キャリア周波数設定部に設定されているキャリア周波数に前記変化幅制限値を加算又は減算して第3の位相補正用キャリア周波数を演算する第3のキャリア周波数演算部を備え、
前記キャリア周波数設定部は、前記検出した位相誤差が設定した閾値を超えているが、第1の位相補正用キャリア周波数と前記キャリア周波数設定部に設定されているキャリア周波数との差が前記変化幅制限値を超えていないときは、キャリア信号のキャリア周波数を、設定した期間第1の位相補正用キャリア周波数に設定変更し、前記検出した位相誤差が設定した閾値を超えており、且つ第1の位相補正用キャリア周波数と前記周波数設定部に設定されているキャリア周波数との差が前記変化幅制限値を超えているときは、キャリア信号のキャリア周波数を設定した期間第3の位相補正用キャリア周波数に設定変更する、ことを特徴とする請求項1に記載の同期PWM制御の位相補正装置。
【請求項4】
前記キャリア周波数設定部には、同期PWM制御におけるキャリア周波数fc=Kp×f
0
(Kpは出力電圧指令の1周期あたりのキャリア信号のパルス数、f
0
は電力変換器の出力周波数)が設定され、
前記位相誤差検出部は、前記出力電圧指令とキャリア信号の位相が同期しており、前記パルス数Kpであるときの、出力電圧指令の設定した基準点における位相の同期位相θ’
v0
を次の(3)式で定義し、
TIFF
2024133856000023.tif
50
166
前記出力電圧指令の設定した基準点における位相を検出した検出位相θ
v0
と、前記(3)式で定義した同期位相θ’
v0
との誤差を検出し、
前記第1のキャリア周波数演算部は、次の(4)式、(5)式によって第1の位相補正用キャリア周波数f
cθ
を演算し、
TIFF
2024133856000024.tif
50
166
TIFF
2024133856000025.tif
50
166
(ただしθ
err
は同期位相θ’
v0
と検出位相θ
v0
の差)
前記キャリア周波数設定部における、第1の位相補正用キャリア周波数に設定変更する期間はキャリア信号のKp周期であることを特徴とする請求項1に記載の同期PWM制御の位相補正装置。
【請求項5】
前記キャリア周波数設定部には、同期PWM制御におけるキャリア周波数fc=Kp×f
0
(Kpは出力電圧指令の1周期あたりのキャリア信号のパルス数、f
0
は電力変換器の出力周波数)が設定され、
前記位相誤差検出部は、前記出力電圧指令とキャリア信号の位相が同期しており、前記パルス数Kpであるときの、出力電圧指令の設定した基準点における位相の同期位相θ’
v0
を次の(3)式で定義し、
TIFF
2024133856000026.tif
50
166
前記出力電圧指令の設定した基準点における位相を検出した検出位相θ
v0
と、前記(3)式で定義した同期位相θ’
v0
との誤差を検出し、
前記第1のキャリア周波数演算部は、次の(4)式、(5)式によって第1の位相補正用キャリア周波数f
cθ
を演算し、
TIFF
2024133856000027.tif
50
166
TIFF
2024133856000028.tif
50
166
(ただしθ
err
は同期位相θ’
v0
と検出位相θ
v0
の差)
前記第2のキャリア周波数演算部は、次の(6)式、(5)式によって第2の位相補正用キャリア周波数(f
cθ
)を演算し、
TIFF
2024133856000029.tif
50
166
TIFF
2024133856000030.tif
50
166
(ただしθ
err
は同期位相θ’
v0
と検出位相θ
v0
の差)
前記キャリア周波数設定部における、第1の位相補正用キャリア周波数に設定変更する期間はキャリア信号のKp周期であり、第2の位相補正用キャリア周波数に設定変更する期間はキャリア信号の(Kp-1)周期であることを特徴とする請求項2に記載の同期PWM制御の位相補正装置。
【請求項6】
前記キャリア周波数設定部には、同期PWM制御におけるキャリア周波数fc=Kp×f
0
(Kpは出力電圧指令の1周期あたりのキャリア信号のパルス数、f
0
は電力変換器の出力周波数)が設定され、
前記位相誤差検出部は、前記出力電圧指令とキャリア信号の位相が同期しており、前記パルス数Kpであるときの、出力電圧指令の設定した基準点における位相の同期位相θ’
v0
を次の(3)式で定義し、
TIFF
2024133856000031.tif
50
166
前記出力電圧指令の設定した基準点における位相を検出した検出位相θ
v0
と、前記(3)式で定義した同期位相θ’
v0
との誤差を検出し、
前記第1のキャリア周波数演算部は、次の(4)式、(5)式によって第1の位相補正用キャリア周波数f
cθ
を演算し、
TIFF
2024133856000032.tif
50
166
TIFF
2024133856000033.tif
50
166
(ただしθ
err
は同期位相θ’
v0
と検出位相θ
v0
の差)
前記第3のキャリア周波数演算部は次の(7)式によって第3の位相補正用キャリア周波数f’
cθ
を演算し、
TIFF
2024133856000034.tif
50
166
(ただしf
c_z
は現在キャリア周波数設定部に設定されているキャリア周波数、f
lim
はキャリア周波数の変化幅制限値)
前記(7)式のf
lim
の加算又は減算は次の(8)式の大小関係によって決定し、
TIFF
2024133856000035.tif
50
166
前記キャリア周波数設定部における、第1の位相補正用キャリア周波数に設定変更する期間と、第3の位相補正用キャリア周波数に設定変更する期間は、ともにキャリア信号のKp周期であることを特徴とする請求項3に記載の同期PWM制御の位相補正装置。
【請求項7】
出力電圧指令とキャリア信号の位相を同期させる同期PWM制御がなされる単相又は三相の電力変換器における同期PWM制御の位相補正方法であって、
位相誤差検出部が、同期PWM制御により運転中の電力変換器の出力電圧指令の位相と、同期PWM制御におけるキャリア周波数のキャリア信号の位相との誤差を検出する位相誤差検出ステップと、
第1のキャリア周波数演算部が、前記検出した位相誤差が設定した閾値を超えたときに、当該位相誤差を補正する第1の位相補正用キャリア周波数を演算する第1のキャリア周波数演算ステップと、
キャリア周波数設定部が、同期PWM制御による運転中は同期PWM制御におけるキャリア周波数を演算して設定するステップと、前記位相誤差検出ステップで検出された位相誤差が設定した閾値を超えた場合に、前記キャリア信号のキャリア周波数を、設定した期間前記第1の位相補正用キャリア周波数に設定変更するキャリア周波数設定変更ステップと、
を備えたことを特徴とする同期PWM制御の位相補正方法。
【請求項8】
第2のキャリア周波数演算部が、前記演算された第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えているか否かを判定し、上限を超えている場合に、前記位相誤差を補正する、電力変換器のキャリア周波数の上限を超えない第2の位相補正用キャリア周波数を演算する第2のキャリア周波数演算ステップを備え、
前記キャリア周波数設定変更ステップは、前記第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えていない場合は前記キャリア信号のキャリア周波数を、設定した期間前記第1の位相補正用キャリア周波数に設定変更し、前記第1の位相補正用キャリア周波数が電力変換器のキャリア周波数の上限を超えている場合は前記キャリア信号のキャリア周波数を、設定した期間前記第2の位相補正用キャリア周波数に設定変更することを特徴とする請求項7に記載の同期PWM制御の位相補正方法。
【請求項9】
第3のキャリア周波数演算部が、前記演算された第1の位相補正用キャリア周波数と前記キャリア周波数設定部に設定されているキャリア周波数との差が、設定した変化幅制限値を超えているか否かを判定し、変化幅制限値を超えている場合は、キャリア周波数設定部に設定されているキャリア周波数に前記変化幅制限値を加算又は減算して第3の位相補正用キャリア周波数を演算する第3のキャリア周波数演算ステップを備え、
前記キャリア周波数設定変更ステップは、前記検出した位相誤差が設定した閾値を超えているが、第1の位相補正用キャリア周波数と前記キャリア周波数設定部に設定されているキャリア周波数との差が前記変化幅制限値を超えていないときは、キャリア信号のキャリア周波数を、設定した期間第1の位相補正用キャリア周波数に設定変更し、前記検出した位相誤差が設定した閾値を超えており、且つ第1の位相補正用キャリア周波数と前記周波数設定部に設定されているキャリア周波数との差が前記変化幅制限値を超えているときは、キャリア信号のキャリア周波数を設定した期間第3の位相補正用キャリア周波数に設定変更する、ことを特徴とする請求項7に記載の同期PWM制御の位相補正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明はモータなどの駆動を行う電力変換器において、同期PWM制御の出力電圧指令とキャリア信号の位相誤差を補正する方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
インバータなどの電力変換器において、所望の出力電圧や電流を生成するための制御方法に、出力電圧指令とキャリア信号との比較に基づいて電力変換器内のスイッチング素子をオンオフさせるPWM制御方法がある。
【0003】
特許文献1には、非同期PWM制御から同期PWM制御への切り替え、および同期PWM制御におけるパルス数切り替えにおいて、適切な切り替え条件を設けることで切り替え時の電流ショックやトルクショックを抑制する方法が提案されている。切り替え前後のキャリア信号と出力電圧指令の位相差がある範囲内であることを切り替え条件とすることを特徴とする。
【0004】
特許文献2には、同期PWM制御におけるキャリア周波数の変更タイミングを決定する方法が提案されている。出力(ロータ)の電気角とキャリア信号の位相差にある閾値を設け、その閾値を超えた場合にキャリア周波数の変更を許可することを特徴とする。
【先行技術文献】
【特許文献】
【0005】
特開2010-51129号公報
特開2010-98868号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
同期PWM制御で重要となるのは、出力電圧指令とキャリア信号の位相が同期していることであり、これにより出力電圧のパルスの対称性が保たれ、出力の低周波脈動などの問題を解消することができる。
【0007】
特許文献1では、非同期PWM制御から同期PWM制御への切り替え、または同期PWM制御のパルス数切り替えにおいて、切り替え前後のキャリア信号(三角波)と出力電圧指令の位相差がある範囲内であることを切り替え条件とする方法が提案されている。
【0008】
非同期PWM制御から同期PWM制御に切り替える際には、出力電圧指令とキャリア信号の位相差が定義された基準値の±5°程度の範囲内にあるか判定し、その判定を満足しない場合は非同期PWM制御を継続し、判定を満足する場合は同期PWM制御に切り替える。
【0009】
同期PWM制御のパルス数を切り替える際には、パルス数が奇数の場合は出力電圧指令とキャリア信号の位相は同期状態を保っているため、切り替え時の判定を不要としている。このように、特許文献1では判定を満足しない場合には非同期PWM制御から同期PWM制御への切り替えに遅延が発生する。また、同期PWM制御で駆動中に位相誤差が発生することを考慮できていない。
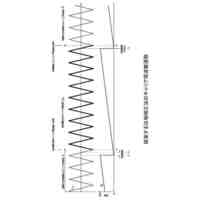
【0010】
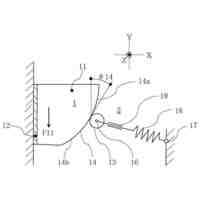
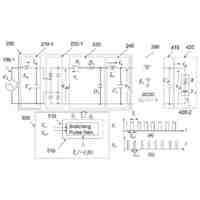
特許文献2では、負荷であるモータのロータ回転速度が急変した際にも、安定的に同期PWM制御が実施される方法が提案されている。図1に、キャリア信号とロータ電気角の位相関係の例を示す。キャリア信号の位相をθ
CA
、ロータ電気角の位相をθ
m
としている。キャリア信号の1周期ごとにそのときのロータ電気角をサンプリングする(図1のθ
m1
~θ
m5
)。このサンプリングされたロータ電気角の各位相は、定義された上限閾値および下限閾値と比較され、その閾値を超えた場合にキャリア周波数を変更する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
走行体
今日
株式会社明電舎
回転機
3日前
株式会社明電舎
回転電機
3日前
株式会社明電舎
逆力機構
今日
株式会社明電舎
ステータ及び回転機
3日前
株式会社明電舎
コンデンサユニット、開閉装置
今日
株式会社明電舎
架線金具異常検出装置および方法
今日
株式会社明電舎
非線形抵抗材料及び放電防止構造
今日
株式会社明電舎
酸化亜鉛素子およびその製造方法
3日前
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
株式会社明電舎
オゾン水の供給装置および供給方法
3日前
株式会社明電舎
半導体モジュールおよび電力変換装置
今日
株式会社明電舎
電子ビーム放出構造及び電界放射装置
3日前
株式会社明電舎
ダイナモメータシステム及びその暖機方法
3日前
株式会社明電舎
車速指令生成装置及びコンピュータプログラム
3日前
株式会社明電舎
同期PWM制御の位相補正装置および位相補正方法
今日
株式会社明電舎
車両システムの振動抑制制御装置及び振動抑制制御方法
3日前
株式会社明電舎
基板の洗浄装置,基板の洗浄方法,半導体装置の製造方法
3日前
株式会社明電舎
電流指令テーブル自動適合装置および電流指令テーブル自動適合方法
3日前
株式会社明電舎
車速指令生成装置、車速指令生成方法、及びコンピュータプログラム
3日前
個人
共振形AC-DC電源
3日前
個人
ファラデー発電改良型
20日前
中国電力株式会社
梯子
3日前
キヤノン電子株式会社
モータ
13日前
個人
磁気浮上モーター
8日前
ニデック株式会社
モータ
24日前
株式会社ミクロブ
駆動装置
6日前
キヤノン株式会社
制御装置
13日前
オムロン株式会社
保護装置
3日前
トヨタ自動車株式会社
ロータ
14日前
本田技研工業株式会社
回転電機
21日前
サンデン株式会社
電力変換装置
6日前
本田技研工業株式会社
回転電機
21日前
ダイハツ工業株式会社
冷却装置
21日前
オムロン株式会社
フィルタ装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ