TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024133855
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023043851
出願日
2023-03-20
発明の名称
逆力機構
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
F16F
3/04 20060101AFI20240926BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】逆力機構において、簡素化と小型化を図り、正力を有する機器の性能をさらに向上させる。
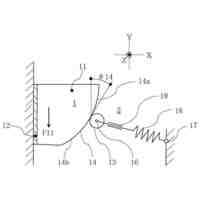
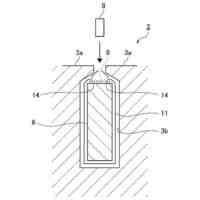
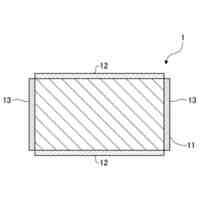
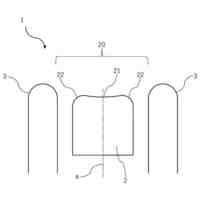
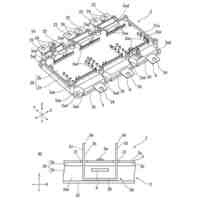
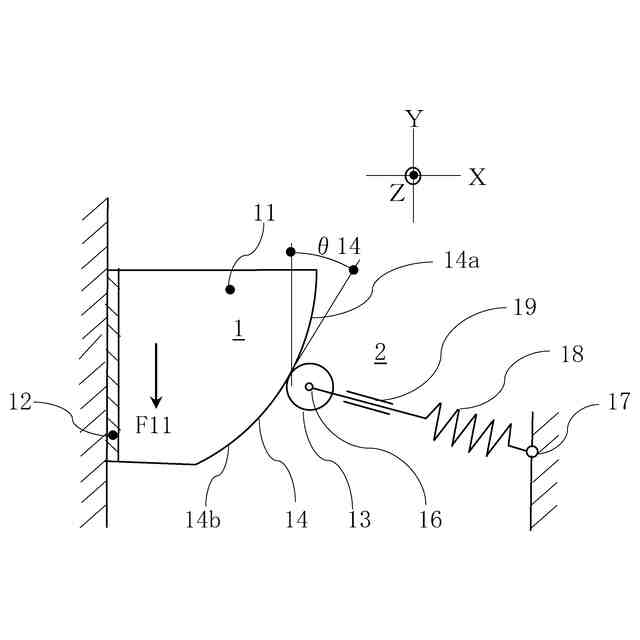
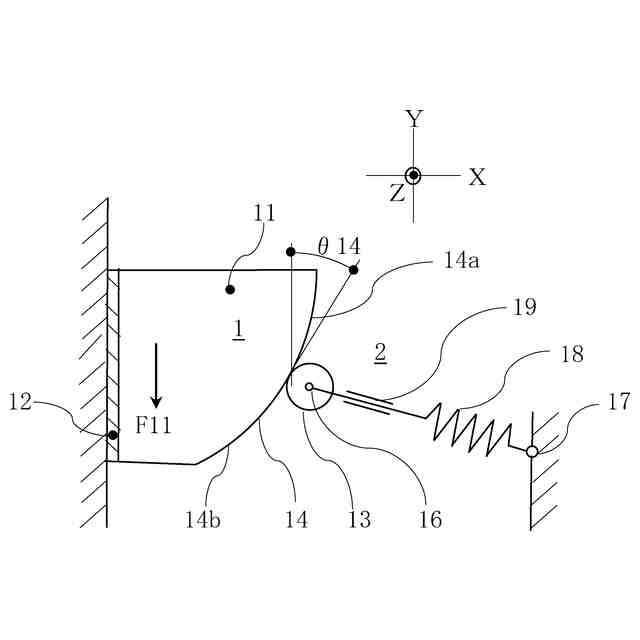
【解決手段】逆力機構は、正力を有する機器と組み合わせて、同じ作用点に逆力を与え合計操作力を調整する。原動節1にはカム曲面14が形成され、正力を有する機器から正力操作力F11が与えられて正力操作力F11が与えられた軸方向に移動可能となる。従属節2は、カム曲面14に接してカム曲面14に接圧を加えるローラ13を有する。カム曲面14は、カム曲面14とローラ13の接線と正力操作力F11の軸方向との角度である勾配角θ14が原動節1の位置により変化するように形成される。また、カム曲面14は、接圧により生じ勾配角θ14によって変化する逆力と正力操作力F11とを合力した合力操作力がほぼ一定となるように形成される。
【選択図】図1
特許請求の範囲
【請求項1】
正力を有する機器と組み合わせて、同じ作用点に逆力を与え合計操作力を調整する逆力機構であって、
カム曲面が形成され、前記正力を有する機器から正力操作力が与えられて前記正力操作力が与えられた軸方向に移動可能な原動節と、
前記カム曲面に接して前記カム曲面に接圧を加えるローラを有する従属節と、
を備え、
前記カム曲面は、
前記カム曲面と前記ローラの接線と前記正力操作力の軸方向との角度である勾配角が前記原動節の位置により変化するように形成され、かつ、前記接圧により生じ前記勾配角によって変化する前記逆力と前記正力操作力とを合力した前記合計操作力がほぼ一定となるように形成されたことを特徴とする逆力機構。
続きを表示(約 1,200 文字)
【請求項2】
前記従属節は、
前記ローラを軸支する回転軸と、
前記カム曲面に対向する位置に固定されたばね軸と、
前記回転軸と前記ばね軸との間に設けられた調整ばねと、
を備え、
前記調整ばねの弾性力により前記ローラを前記カム曲面に接した状態で前記調整ばねの伸縮方向に移動させ、前記調整ばねの弾性力により前記接圧を生じさせることを特徴とする請求項1記載の逆力機構。
【請求項3】
前記従属節は、
前記原動節よりも前記正力操作力の軸方向の一方側に固定された主軸と、
前記原動節よりも前記正力操作力の軸方向の他方側に固定されたばね軸と、
前記主軸に一端が固定されたリンクと、
前記リンクの他端に設けられた回転軸と、
前記回転軸に軸支された前記ローラと、
前記回転軸と前記ばね軸との間に設けられた調整ばねと、
を備え、
前記調整ばねの弾性力により前記ローラを前記カム曲面に接した状態で前記主軸を中心とした円弧状に移動させ、前記調整ばねの弾性力により前記ばね軸と前記リンクの角度であるリンク角度と前記勾配角とによって変化する前記接圧を生じさせ、
前記カム曲面は、
前記リンク角度および前記勾配角が前記原動節の位置により変化するように形成されたことを特徴とする請求項1記載の逆力機構。
【請求項4】
前記カム曲面は、前記ローラをガイドするカム曲面溝であり、
前記従属節は、
前記原動節よりも、前記正力操作力の軸方向に対して前記勾配角側に直交する軸方向の一方側に固定された主軸と、
前記主軸に一端が接続されたリンクと、
前記リンクの他端に設けられた前記ローラと、
前記原動節よりも、前記正力操作力の軸方向に対して前記勾配角側に直交する軸方向の他方側に固定されたばね軸と、
前記ローラと前記ばね軸との間に設けられた調整ばねと、
を備え、
前記調整ばねの弾性力により前記ローラを前記カム曲面溝にガイドされた状態で前記主軸を中心とした円弧状に移動させ、前記調整ばねの弾性力により前記ばね軸と前記リンクの角度であるリンク角度と前記勾配角とによって変化する前記接圧を生じさせ、
前記カム曲面溝は、
前記リンク角度および前記勾配角が前記原動節の位置により変化するように形成されたことを特徴とする請求項1記載の逆力機構。
【請求項5】
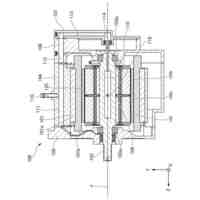
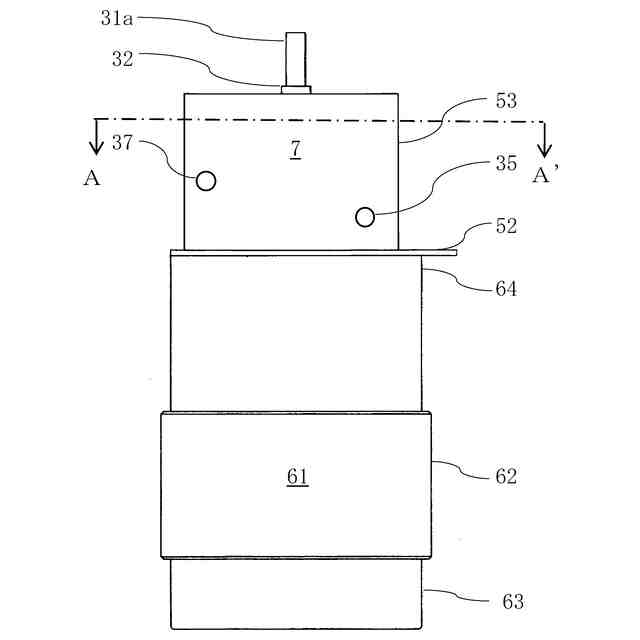
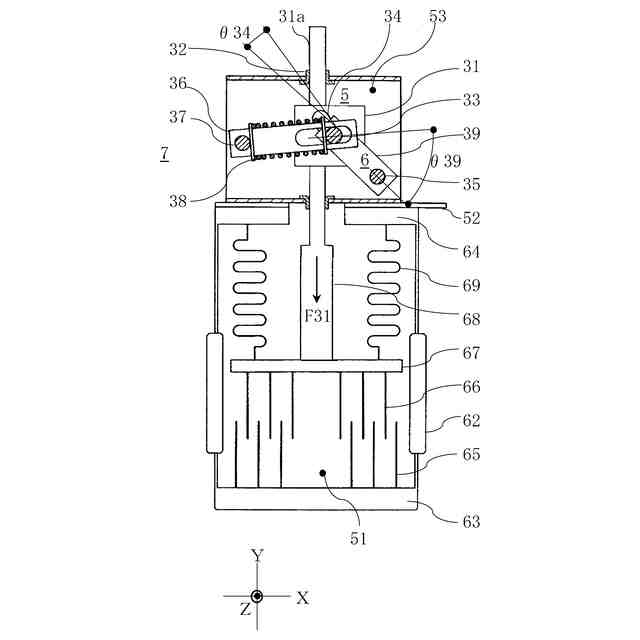
前記正力を有する機器は可変真空コンデンサであり、
前記可変真空コンデンサの操作棒に前記原動節を固定し
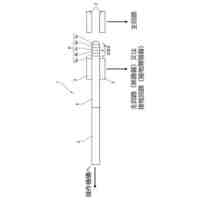
前記可変真空コンデンサの可動側導体の前記正力操作力の軸方向に端子導体を介して前記逆力機構を直接固着したことを特徴とする請求項1~4のうち何れかに記載の逆力機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、正のばね定数を有しある作用点にある向きに働く力(以下、単に正力という)を有する機器と組み合わせて、負のばね定数を有し同じ作用点に逆向きに働く力(以下、単に逆力という)を与え、操作力を調整する逆力機構に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
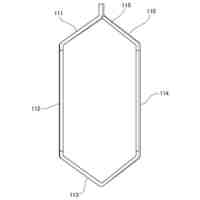
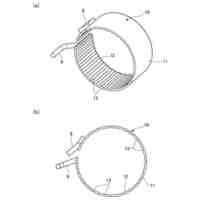
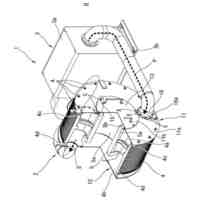
正力を有する機器は、ばねのごとく変位毎に復元力が生じる。ここで正力を有する機器として可変真空コンデンサがある。可変真空コンデンサは、内部にベローズを有し真空部を気密保持しながら電極の対向面積を変え、静電容量を変化させる。静電容量の変化時、ベローズのバネ定数に従う変位毎の復元力と真空圧が加わる。これにより、真空可変コンデンサは最も挿入された位置(可動電極が最も固定側導体に近づいた位置)で最も小さいプラスの引込力となり、挿出する程引込力が増加する正力の操作特性となる。
【0003】
正力を有する機器に合力させる逆力機構として、従来から、特許文献1に開示された逆力を得る弾性機構が知られている。この従来技術は、正のばね定数を有する正弾性機構と負のばね定数を有する負弾性機構の2組の機構を組合せ、更に負弾性機構では主副2種の負弾性部で構成されている。このような構成により、任意の正負両方のばね定数が得られる。
【先行技術文献】
【特許文献】
【0004】
特許第6774102号
【発明の概要】
【発明が解決しようとする課題】
【0005】
正力の操作特性を有する機器を高速で精密に操作するには、低操作力、定操作力で操作を行えることが望ましい。操作力を低減したい場合や操作力の変化を小さくしたい(定操作力にしたい)場合、装置自身が改善できないときは逆力機構と組み合わせる必要が生じる。しかし、従来の逆力機構は構成が複雑・大型であった。
【0006】
以上示したようなことから、逆力機構において、簡素化と小型化を図り、正力を有する機器の性能をさらに向上させることが課題となる。
【課題を解決するための手段】
【0007】
本発明は、前記従来の問題に鑑み、案出されたもので、その一態様は、正力を有する機器と組み合わせて、同じ作用点に逆力を与え合計操作力を調整する逆力機構であって、カム曲面が形成され、前記正力を有する機器から正力操作力が与えられて前記正力操作力が与えられた軸方向に移動可能な原動節と、前記カム曲面に接して前記カム曲面に接圧を加えるローラを有する従属節と、を備え、前記カム曲面は、前記カム曲面と前記ローラの接線と前記正力操作力の軸方向との角度である勾配角が前記原動節の位置により変化するように形成され、かつ、前記接圧により生じ前記勾配角によって変化する前記逆力と前記正力操作力とを合力した前記合計操作力がほぼ一定となるように形成されたことを特徴とする。
【0008】
また、その一態様として、前記従属節は、前記ローラを軸支する回転軸と、前記カム曲面に対向する位置に固定されたばね軸と、前記回転軸と前記ばね軸との間に設けられた調整ばねと、を備え、前記調整ばねの弾性力により前記ローラを前記カム曲面に接した状態で前記調整ばねの伸縮方向に移動させ、前記調整ばねの弾性力により前記接圧を生じさせることを特徴とする。
【0009】
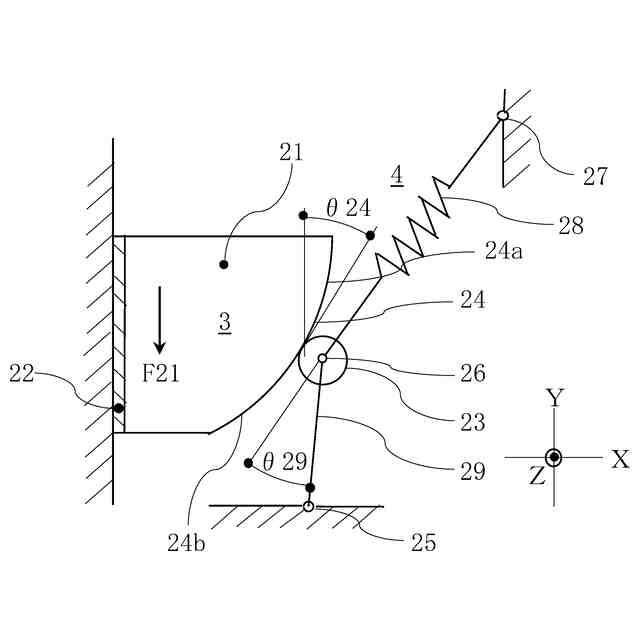
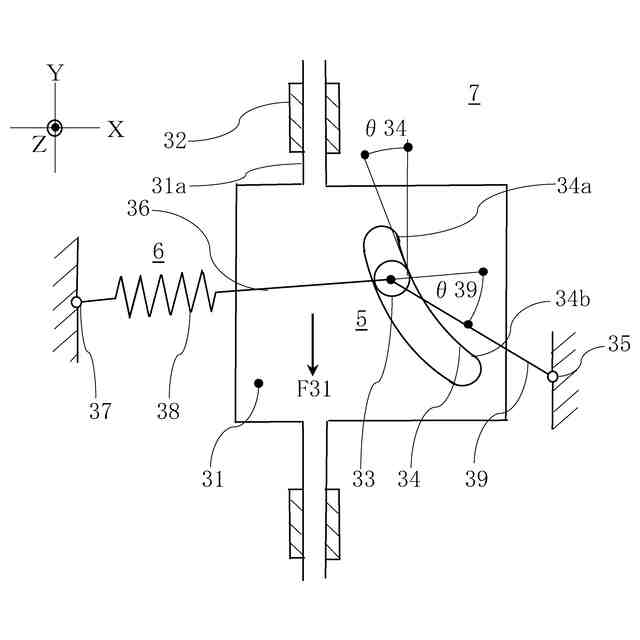
また、他の態様として、前記従属節は、前記原動節よりも前記正力操作力の軸方向の一方側に固定された主軸と、前記原動節よりも前記正力操作力の軸方向の他方側に固定されたばね軸と、前記主軸に一端が固定されたリンクと、前記リンクの他端に設けられた回転軸と、前記回転軸に軸支された前記ローラと、前記回転軸と前記ばね軸との間に設けられた調整ばねと、を備え、前記調整ばねの弾性力により前記ローラを前記カム曲面に接した状態で前記主軸を中心とした円弧状に移動させ、前記調整ばねの弾性力により前記ばね軸と前記リンクの角度であるリンク角度と前記勾配角とによって変化する前記接圧を生じさせ、前記カム曲面は、前記リンク角度および前記勾配角が前記原動節の位置により変化するように形成されたことを特徴とする。
【0010】
また、他の態様として、前記カム曲面は、前記ローラをガイドするカム曲面溝であり、前記従属節は、前記原動節よりも、前記正力操作力の軸方向に対して前記勾配角側に直交する軸方向の一方側に固定された主軸と、前記主軸に一端が接続されたリンクと、前記リンクの他端に設けられた前記ローラと、前記原動節よりも、前記正力操作力の軸方向に対して前記勾配角側に直交する軸方向の他方側に固定されたばね軸と、前記ローラと前記ばね軸との間に設けられた調整ばねとを備え、前記調整ばねの弾性力により前記ローラを前記カム曲面溝にガイドされた状態で前記主軸を中心とした円弧状に移動させ、前記調整ばねの弾性力により前記ばね軸と前記リンクの角度であるリンク角度と前記勾配角とによって変化する前記接圧を生じさせ、前記カム曲面溝は、前記リンク角度および前記勾配角が前記原動節の位置により変化するように形成されたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
回転機
3日前
株式会社明電舎
走行体
今日
株式会社明電舎
逆力機構
今日
株式会社明電舎
回転電機
3日前
株式会社明電舎
電力変換装置
24日前
株式会社明電舎
電力変換装置
6日前
株式会社明電舎
回転電機の筐体構造
1か月前
株式会社明電舎
ステータ及び回転機
3日前
株式会社明電舎
ロータ及び回転電機
13日前
株式会社明電舎
ステータ、及び回転機
6日前
株式会社明電舎
回転機筐体の流路構造
20日前
株式会社明電舎
固定子および回転電機
13日前
株式会社明電舎
車両自動運転装置用キャリア
1か月前
株式会社明電舎
車両自動運転装置用キャリア
1か月前
株式会社明電舎
ガス中で電流を遮断する装置
13日前
株式会社明電舎
ハイブリッド励磁式回転電機
1か月前
株式会社明電舎
コンデンサユニット、開閉装置
今日
株式会社明電舎
過熱保護装置及び過熱保護方法
1か月前
株式会社明電舎
架線金具異常検出装置および方法
今日
株式会社明電舎
酸化亜鉛素子およびその製造方法
3日前
株式会社明電舎
非線形抵抗材料及び放電防止構造
今日
株式会社明電舎
オゾン水の供給装置および供給方法
3日前
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
株式会社明電舎
車両自動運転装置用アクチュエータ
今日
株式会社明電舎
電子ビーム放出構造及び電界放射装置
3日前
株式会社明電舎
半導体モジュールおよび電力変換装置
今日
株式会社明電舎
ダイナモメータシステム及びその暖機方法
3日前
株式会社明電舎
部分放電量評価装置、部分放電量評価方法
13日前
株式会社明電舎
シーブの加熱システム、シーブの加熱方法
3日前
株式会社明電舎
車両の検査装置及び車両の検査装置の使用方法
1か月前
株式会社明電舎
車速指令生成装置及びコンピュータプログラム
3日前
株式会社明電舎
PMモータの温度推定装置および温度推定方法
1か月前
株式会社明電舎
同期PWM制御の位相補正装置および位相補正方法
今日
株式会社明電舎
車両システムの振動抑制制御装置及び振動抑制制御方法
3日前
株式会社明電舎
基板の洗浄装置,基板の洗浄方法,半導体装置の製造方法
3日前
株式会社明電舎
最適配電網切替手順算出システム及び最適配電網切替手順算出方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ