TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024128867
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023038131
出願日
2023-03-10
発明の名称
3次元点群位置合わせ装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G06T
1/00 20060101AFI20240913BHJP(計算;計数)
要約
【課題】複数の3次元点群データ同士の位置合わせの精度を向上させる。
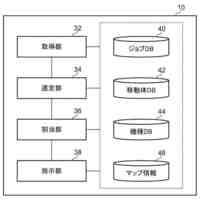
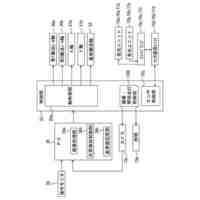
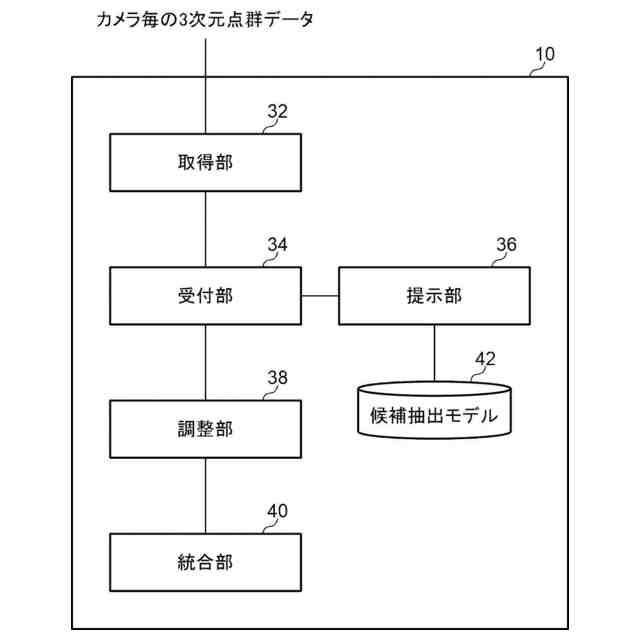
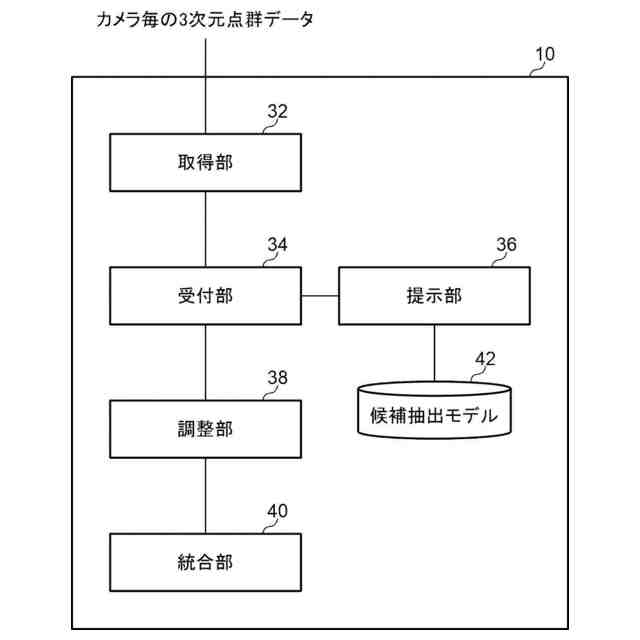
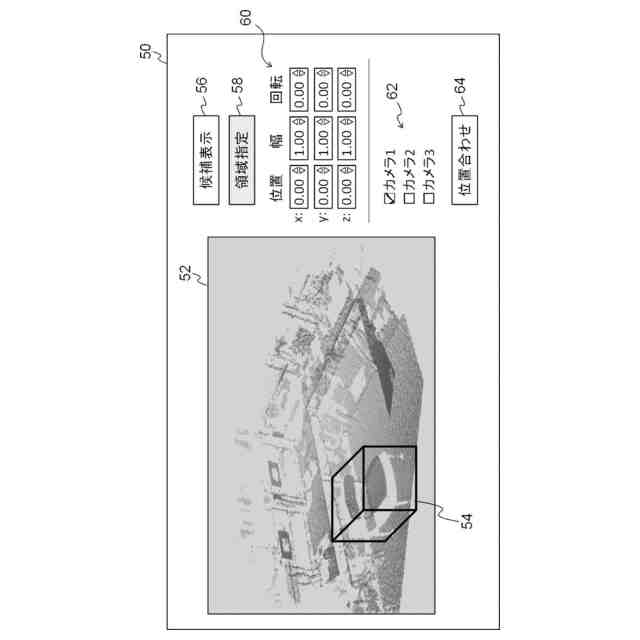
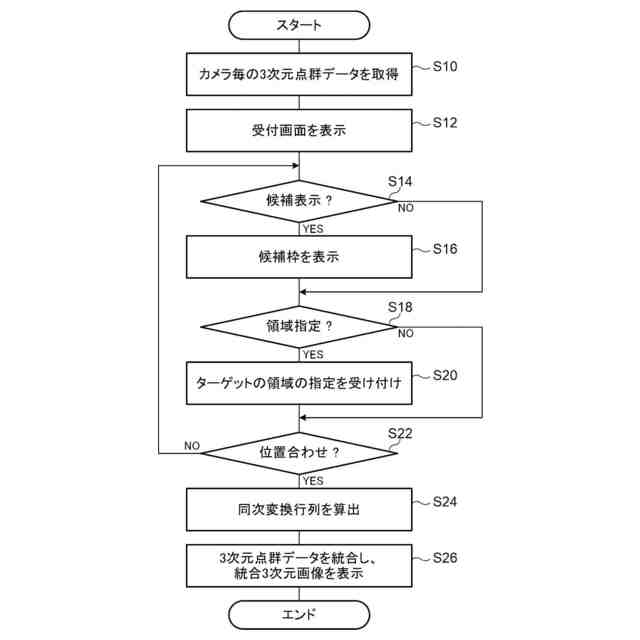
【解決手段】取得部32が、周辺環境の各点の3次元位置を検出する複数のカメラの各々によるセンシング結果である複数の3次元点群データを取得し、受付部34が、複数の3次元点群データの各々を示す3次元画像の各々を画面に表示すると共に、3次元画像の各々において、複数の3次元点群データ間の位置合わせの基準となる領域の指定を受け付け、調整部が、複数の3次元点群データの各々の領域に対応する部分3次元点群データ同士の位置合わせを行う。
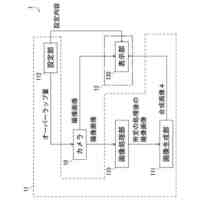
【選択図】図3
特許請求の範囲
【請求項1】
周辺環境の各点の3次元位置を検出する複数のセンサの各々によるセンシング結果である複数の3次元点群データを取得する取得部と、
前記複数の3次元点群データの各々を示す3次元画像の各々を画面に表示すると共に、前記3次元画像の各々において、前記複数の3次元点群データ間の位置合わせの基準となる領域の指定を受け付ける受付部と、
前記複数の3次元点群データの各々の前記領域に対応する部分3次元点群データ同士の位置合わせを行う調整部と、
を含む3次元点群位置合わせ装置。
続きを表示(約 1,400 文字)
【請求項2】
前記受付部は、位置と、3次元の各方向のサイズとをそれぞれ変更可能な3次元枠を前記画面に表示し、前記3次元枠に対する変更操作を受け付けることにより、前記領域の指定を受け付ける請求項1に記載の3次元点群位置合わせ装置。
【請求項3】
前記受付部は、前記3次元画像の各々及び前記3次元枠を、拡大、縮小、及び回転可能に前記画面に表示する請求項2に記載の3次元点群位置合わせ装置。
【請求項4】
3次元点群データに含まれる物体の領域を抽出するように訓練された機械学習モデルにより抽出される領域を、前記基準となる物体を示す領域の候補として提示する提示部を含み、
前記受付部は、前記候補に対応付けて前記画面に表示された前記3次元枠に対する変更操作を受け付ける
請求項2に記載の3次元点群位置合わせ装置。
【請求項5】
前記調整部は、前記部分3次元点群データ同士の同次変換行列を算出する請求項1に記載の3次元点群位置合わせ装置。
【請求項6】
前記調整部による位置合わせ結果に基づいて、前記複数の3次元点群データを統合する統合部を含む請求項1に記載の3次元点群位置合わせ装置。
【請求項7】
前記調整部は、ノイズ除去後の前記部分3次元点群データ同士の位置合わせを行う請求項1に記載の3次元点群位置合わせ装置。
【請求項8】
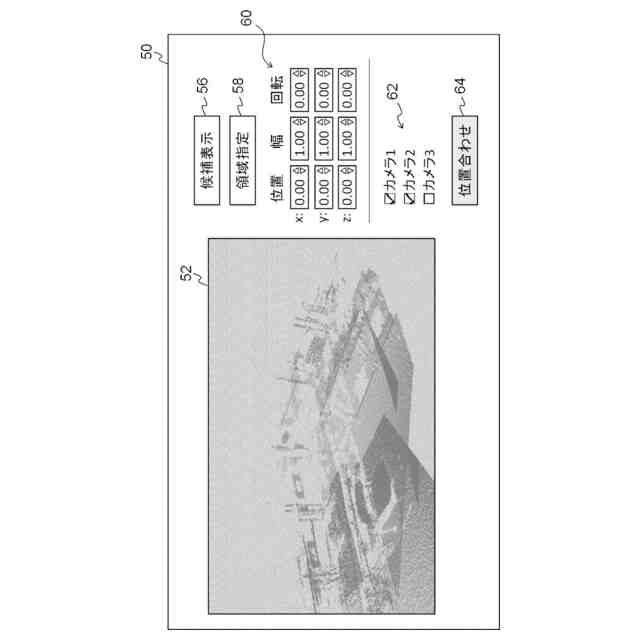
前記調整部による位置合わせ済みの複数のセンサに、新たなセンサを追加する場合、
前記受付部は、前記複数のセンサのいずれか1つについての前記3次元画像と、前記新たなセンサについての3次元画像とに対する前記領域の指定を受け付け、
前記調整部は、前記複数のセンサのいずれか1つについての3次元点群データと、前記新たなセンサについての3次元点群データとの前記領域に対応する部分3次元点群データ同士の位置合わせを行う
請求項1に記載の3次元点群位置合わせ装置。
【請求項9】
取得部と、受付部と、調整部とを含む3次元点群位置合わせ装置が実行する3次元点群位置合わせ方法であって、
前記取得部が、周辺環境の各点の3次元位置を検出する複数のセンサの各々によるセンシング結果である複数の3次元点群データを取得し、
前記受付部が、前記複数の3次元点群データの各々を示す3次元画像の各々を画面に表示すると共に、前記3次元画像の各々において、前記複数の3次元点群データ間の位置合わせの基準となる領域の指定を受け付け、
前記調整部が、前記複数の3次元点群データの各々の前記領域に対応する部分3次元点群データ同士の位置合わせを行う
3次元点群位置合わせ方法。
【請求項10】
コンピュータを、
周辺環境の各点の3次元位置を検出する複数のセンサの各々によるセンシング結果である複数の3次元点群データを取得する取得部、
前記複数の3次元点群データの各々を示す3次元画像の各々を画面に表示すると共に、前記3次元画像の各々において、前記複数の3次元点群データ間の位置合わせの基準となる領域の指定を受け付ける受付部、及び、
前記複数の3次元点群データの各々の前記領域に対応する部分3次元点群データ同士の位置合わせを行う調整部
として機能させるための3次元点群位置合わせプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元点群位置合わせ装置、3次元点群位置合わせ方法、及び3次元点群位置合わせプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、カメラ等の複数のセンサによるセンシング結果の位置合わせを行う技術が提案されている。例えば、クラスタ毎に、共通視野を利用して設定したクラスタ座標系における各カメラの位置及び姿勢を求め、クラスタ毎に複数のカメラの画像からローカル座標系での物体位置を算出するカメラシステムが提案されている。このシステムは、各共通カメラの位置及び姿勢について隣接クラスタ間にて所定の誤差を持たせることによりクラスタ座標系の相互の配置関係を調整した統合座標系を設定し、クラスタ座標系での物体位置を統合座標系に変換する(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2013-93787号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
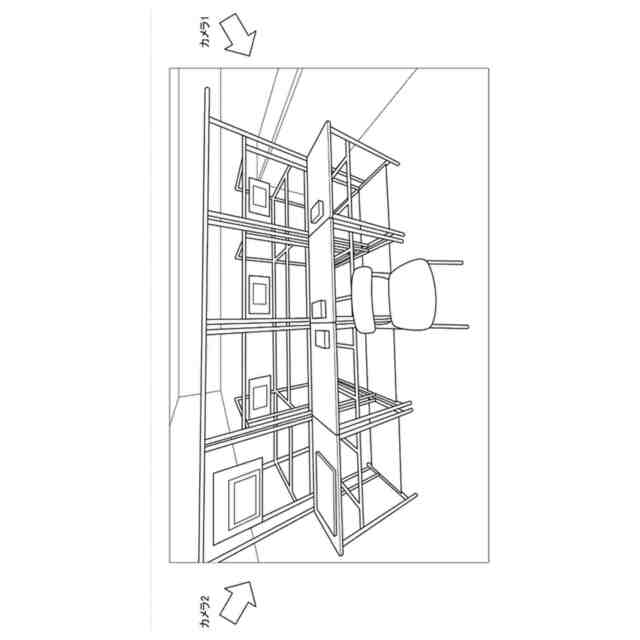
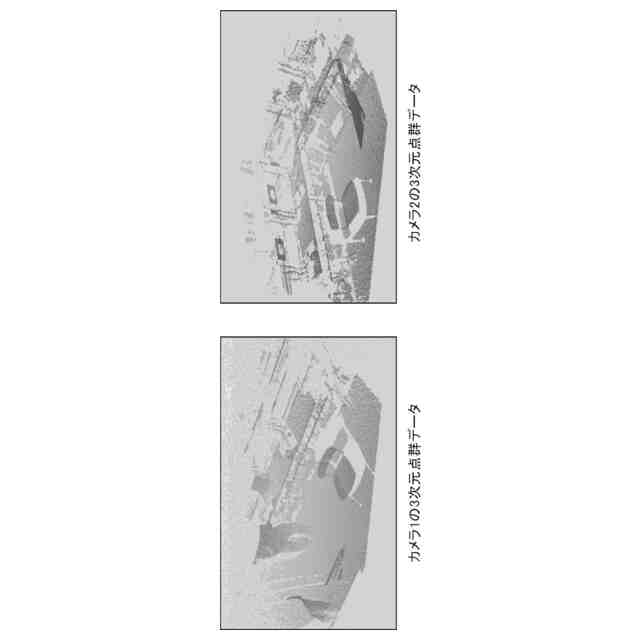
ある環境を複数のセンサでセンシングした複数の3次元点群データ同士の位置合わせを行う場合、一般的には、各3次元点群データ内から特徴点を抽出し、3次元点群データ間で特徴点の対応付けを行う。しかし、環境内に、机、ディスプレイ等、同一の物体が複数存在する場合、特徴点の対応付けに誤りが生じ、位置合わせが失敗する場合がある。特に工場では同じ製品を大量に生産する関係上、同一の物体が複数存在する環境になることが多い。
【0005】
本発明は、複数の3次元点群データ同士の位置合わせの精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係る3次元点群位置合わせ装置は、周辺環境の各点の3次元位置を検出する複数のセンサの各々によるセンシング結果である複数の3次元点群データを取得する取得部と、前記複数の3次元点群データの各々を示す3次元画像の各々を画面に表示すると共に、前記3次元画像の各々において、前記複数の3次元点群データ間の位置合わせの基準となる領域の指定を受け付ける受付部と、前記複数の3次元点群データの各々の前記領域に対応する部分3次元点群データ同士の位置合わせを行う調整部と、を含んで構成される。
【0007】
また、前記受付部は、位置と、3次元の各方向のサイズとをそれぞれ変更可能な3次元枠を前記画面に表示し、前記3次元枠に対する変更操作を受け付けることにより、前記領域の指定を受け付けてもよい。
【0008】
また、前記受付部は、前記3次元画像の各々及び前記3次元枠を、拡大、縮小、及び回転可能に前記画面に表示してもよい。
【0009】
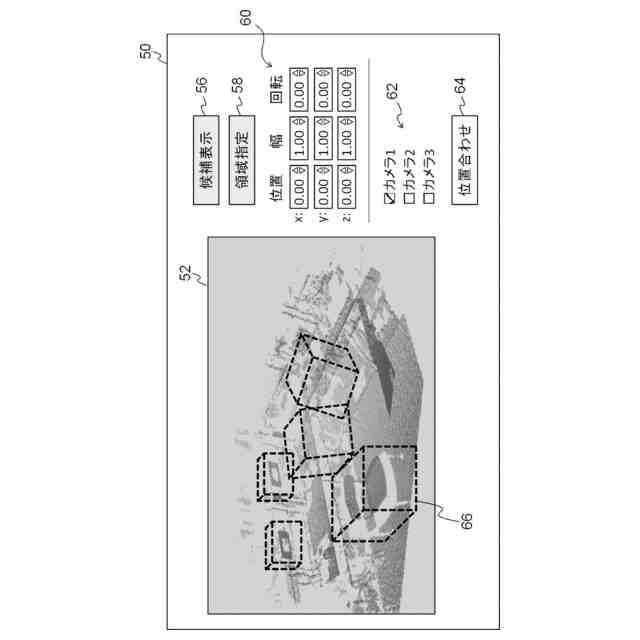
また、本発明に係る3次元点群位置合わせ装置は、3次元点群データに含まれる物体の領域を抽出するように訓練された機械学習モデルにより抽出される領域を、前記基準となる物体を示す領域の候補として提示する提示部を含み、前記受付部は、前記候補に対応付けて前記画面に表示された前記3次元枠に対する変更操作を受け付けてもよい。
【0010】
また、前記調整部は、前記部分3次元点群データ同士の同次変換行列を算出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
モータ
5日前
オムロン株式会社
端子台
13日前
オムロン株式会社
ソケット
13日前
オムロン株式会社
電気機器
6日前
オムロン株式会社
電気機器
13日前
オムロン株式会社
検査装置
28日前
オムロン株式会社
センサ装置
1か月前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
電動把持工具
12日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
充放電システム
6日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
トリガスイッチ
12日前
オムロン株式会社
非接触給電装置
5日前
オムロン株式会社
リミットスイッチ
1日前
オムロン株式会社
電子機器システム
1日前
オムロン株式会社
自律作業システム
27日前
オムロン株式会社
経路情報提供システム
22日前
オムロン株式会社
検出装置および操作装置
26日前
オムロン株式会社
運用支援方法及びシステム
1日前
オムロン株式会社
測定システム及び測定方法
1日前
オムロン株式会社
検査装置及び対象物検知方法
1日前
オムロン株式会社
X線検査装置及びX線検査方法
12日前
オムロン株式会社
装置、温調システムおよび方法
1か月前
オムロン株式会社
外観検査装置、及び外観検査方法
6日前
オムロン株式会社
外観検査装置、及び外観検査方法
5日前
オムロン株式会社
外観検査装置、及び外観検査方法
5日前
オムロン株式会社
出力電圧保持装置および電源装置
1日前
オムロン株式会社
処理装置、処理方法及びプログラム
1日前
オムロン株式会社
制御装置、制御方法及びプログラム
27日前
オムロン株式会社
情報処理装置、方法およびプログラム
23日前
オムロン株式会社
情報処理装置、方法およびプログラム
23日前
オムロン株式会社
半導体モジュール及びサーボドライバ
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ