TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120102
公報種別
公開特許公報(A)
公開日
2024-09-03
出願番号
2024104640,2022176326
出願日
2024-06-28,2020-04-28
発明の名称
外科手術システム、操作装置およびプログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20240827BHJP(医学または獣医学;衛生学)
要約
【課題】ピボット位置を機械的に定める場合に比べて、複数のトロカールが配置された患者の体表面近傍での作業を容易に行うことが可能な手術支援ロボットを提供する。
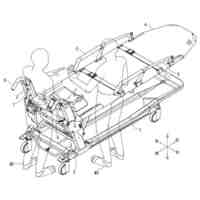
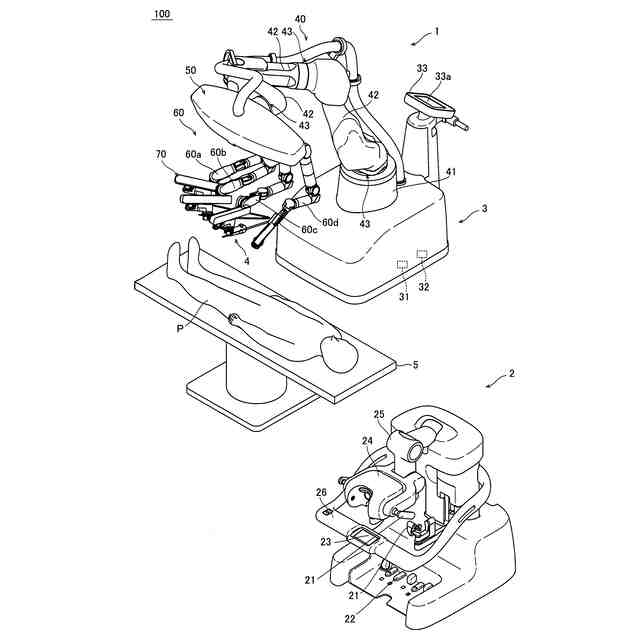
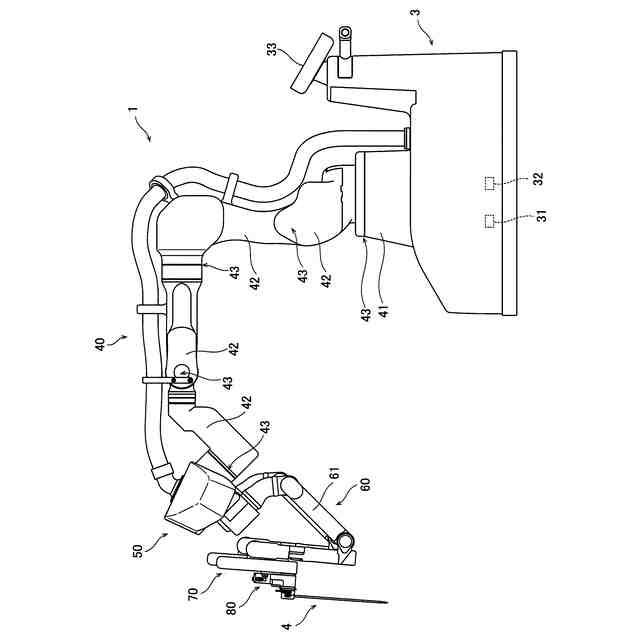
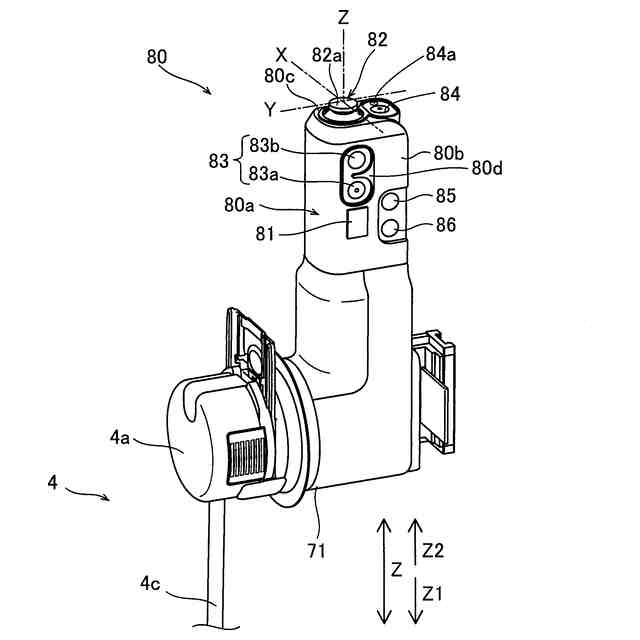
【解決手段】この医療用マニピュレータ1(手術支援ロボット)は、先端側に医療器具4が取り付けられるアーム60と、アーム60に取り付けられ、アーム60を操作する操作部80とを備える。そして、操作部80は、アーム60に取り付けられた医療器具4の移動の支点となるピボット位置PPを教示するピボットボタン85を含む。そして、操作部80によりアーム60が操作されることにより、アーム60の先端側に取り付けられた医療器具4の先端が、患者Pの体表面Sに挿入されたトロカールTの挿入位置に対応する位置まで移動された状態で、ピボットボタン85が押下されることによりピボット位置PPが教示される。
【選択図】図6
特許請求の範囲
【請求項1】
先端側に医療器具が取り付けられるアーム、および、前記アームを操作するために前記アームに設けられた操作部を含む医療用マニピュレータと、制御装置と、記憶装置と、を備える外科手術システムであって、
前記医療器具は、患者の体表面に挿入されたトロカールを介して前記患者の体内に挿入されて用いられ、
前記操作部は、前記アームに取り付けられた前記医療器具の移動の支点となるピボット位置を前記記憶装置に記憶させるピボット位置教示入力部を備え、
前記ピボット位置教示入力部が操作されることにより、前記制御装置は、前記医療器具の先端位置または前記先端位置から腹壁の厚さ方向に移動された位置を前記ピボット位置として前記記憶装置に記憶させるように構成されている、外科手術システム。
続きを表示(約 1,200 文字)
【請求項2】
前記医療用マニピュレータは、前記アームの前記ピボット位置が前記記憶装置に記憶されたことを表示する表示部を備える、請求項1に記載の外科手術システム。
【請求項3】
前記ピボット位置教示入力部は、前記操作部の両側面に設けられている、請求項1または2に記載の外科手術システム。
【請求項4】
前記操作部は、前記ピボット位置が前記記憶装置に記憶されたことを表示するピボット位置インジケータを備える、請求項1~3のいずれか1項に記載の外科手術システム。
【請求項5】
前記操作部は、前記アームによる前記医療器具の移動を操作するためのジョイスティックを備え、
前記制御装置は、前記ジョイスティックの操作に従って前記医療器具が移動するように前記アームを制御するように構成されている、請求項1~4のいずれか1項に記載の外科手術システム。
【請求項6】
前記医療器具は、エンドエフェクタと、前記アームに取り付けられる被駆動ユニットと、前記エンドエフェクタと前記被駆動ユニットとを接続するシャフトと、を備え、
前記操作部は、前記シャフトの長手方向に沿って前記医療器具を並進移動させるモードおよび回転移動させるモードを切り替えるモード切替部と、切り替えられた前記モードを表示するモードインジケータと、を備える、請求項1~5のいずれか1項に記載の外科手術システム。
【請求項7】
前記医療器具を回転移動させるモードでは、前記ピボット位置が教示されていない時は、前記エンドエフェクタを中心に回転移動し、前記ピボット位置が教示されている時は、前記ピボット位置を支点として前記医療器具が回転移動するように、前記アームが移動される、請求項6に記載の外科手術システム。
【請求項8】
前記医療器具は、エンドエフェクタと、前記アームに取り付けられる被駆動ユニットと、前記エンドエフェクタと前記被駆動ユニットを接続するシャフトと、を備え、
前記操作部は、前記シャフトの長手方向に沿って前記医療器具の先端が移動するように前記アームを操作するためのスイッチ部を備える、請求項1~5のいずれか1項に記載の外科手術システム。
【請求項9】
前記アームは、多関節ロボットから構成されているアーム部と、前記アーム部の先端側に設けられるとともに前記医療器具が取り付けられ、前記医療器具を前記患者に挿入する方向に並進移動させる並進移動機構部と、を備え、
前記操作部は、前記並進移動機構部に設けられている、請求項1~8のいずれか1項に記載の外科手術システム。
【請求項10】
前記アームは、前記患者の体表面に挿入された前記トロカールを保持する機構を備えていない、請求項1~9のいずれか1項に記載の外科手術システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、外科手術システム、操作装置およびプログラムに関し、特に、ピボット位置を支点としてアームに取り付けられた医療器具が移動される外科手術システム、操作装置およびプログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、ピボット位置を支点としてアームに取り付けられた医療器具が移動される手術支援ロボットが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、マニピュレータアームと、マニピュレータアームに取り付けられたツール(外科用の手術器具など)とを備えるロボットマニピュレータアセンブリが開示されている。また、マニピュレータアームは、マニピュレータアームに取り付けられたツールを並進移動、または、回転移動させるように構成されている。
【0004】
また、上記特許文献1のマニピュレータアームには、ツールを長手方向に沿って並進させるための器具ホルダが設けられている。また、器具ホルダの遠位部材としてカニューレが保持されている。カニューレには、器具ホルダに保持されたツールの先端が挿入される。また、上記特許文献1のロボットマニピュレータアセンブリでは、カニューレの所定の部分が枢動ポイントとして予め定められている。すなわち、上記特許文献1のロボットマニピュレータアセンブリでは、枢動ポイントが、器具ホルダに保持された状態のカニューレの所定の部分に対して平行四辺形の配置となるように機械的に定められている。そして、器具ホルダに保持されたカニューレが患者に挿入された状態で、枢動ポイントを支点として、ツールが枢動(回転移動)される。
【先行技術文献】
【特許文献】
【0005】
特表2016-516487号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のようなロボットマニピュレータアセンブリでは、4本のロボットマニピュレータアセンブリのそれぞれの器具ホルダが4つのカニューレ(トロカール)をそれぞれ保持している。このため、4つの器具ホルダおよびそれらのカニューレ保持機構によって、4つのカニューレ(トロカール)が挿入された患者の体表面近傍の空間が狭くなってしまう。このため、助手の医師が患者に挿入するトロカールの配置の自由度が低くなるという問題点や、術中に助手の医師が補助作業を行う際に、器具ホルダ等の機構が作業の邪魔になるという問題点がある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、枢動ポイント(ピボット位置)を機械的に定める場合に比べて、複数のトロカールが配置された患者の体表面近傍での作業を容易に行うことが可能な外科手術システム、操作装置およびプログラムを提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、この発明の第1の局面による外科手術システムは、先端側に医療器具が取り付けられるアーム、および、アームを操作するためにアームに設けられた操作部を含む医療用マニピュレータと、制御装置と、記憶装置と、を備える外科手術システムであって、医療器具は、患者の体表面に挿入されたトロカールを介して患者の体内に挿入されて用いられ、操作部は、アームに取り付けられた医療器具の移動の支点となるピボット位置を記憶装置に記憶させるピボット位置教示入力部を備え、ピボット位置教示入力部が操作されることにより、制御装置は、医療器具の先端位置または先端位置から腹壁の厚さ方向に移動された位置をピボット位置として記憶装置に記憶させるように構成されている。
【0009】
この発明の第2の局面による外科手術システムは、先端側に第1医療器具が取り付けられる第1アーム、先端側に第2医療器具が取り付けられる第2アーム、第1アームを操作するために第1アームに設けられた第1操作部、および、第2アームを操作するために第2アームに設けられた第2操作部を備える医療用マニピュレータと、制御装置と、記憶装置と、を備える外科手術システムであって、第1医療器具および第2医療器具は、患者の体表面に挿入されたトロカールを介して患者の体内に挿入されて用いられ、第1操作部は、第1アームに取り付けられた第1医療器具の移動の支点となる第1ピボット位置を記憶装置に記憶させる第1ピボット位置教示入力部を備え、第2操作部は、第2アームに取り付けられた第2医療器具の移動の支点となる第2ピボット位置を記憶装置に記憶させる第2ピボット位置教示入力部を備え、制御装置は、第1ピボット位置教示入力部が操作されることにより、第1医療器具の先端位置または先端位置から腹壁の厚さ方向に移動された位置を第1ピボット位置として記憶装置に記憶させ、第2ピボット位置教示入力部が操作されることにより、第2医療器具の先端位置または先端位置から腹壁の厚さ方向に移動された位置を第2ピボット位置として記憶装置に記憶させるように構成されている。
【0010】
この発明の第3の局面による操作装置は、先端側に医療器具が取り付けられるアームを含む医療用マニピュレータと、制御装置と、記憶装置と、を備える外科手術システム用の操作装置であって、アームを操作するためにアームに設けられ、アームに取り付けられた医療器具の移動の支点となるピボット位置を記憶装置に記憶させるピボット位置教示入力部を備え、医療器具は、患者の体表面に挿入されたトロカールを介して患者の体内に挿入されて用いられ、ピボット位置教示入力部の操作により、制御装置は、医療器具の先端位置または先端位置から腹壁の厚さ方向に移動された位置をピボット位置として記憶装置に記憶させる。この発明の第4の局面によるプログラムは、先端側に医療器具が取り付けられるアーム、および、アームを操作するためにアームに設けられた操作部を含む医療用マニピュレータと、制御装置と、記憶装置と、を備える外科手術システムを制御するためのプログラムであって、操作部は、アームに取り付けられた医療器具の移動の支点となるピボット位置を記憶装置に記憶させるピボット位置教示入力部を備え、制御装置に、アームの先端側に取り付けられた医療器具の先端を、患者の体表面に挿入されたトロカールの挿入位置に対応する位置まで移動させることと、ピボット位置教示入力部が操作されることにより、医療器具の先端位置または先端位置から腹壁の厚さ方向に移動された位置をピボット位置として記憶装置に記憶させることと、を実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
錠剤撒き器
21日前
個人
男性用下着
2か月前
株式会社コロナ
脱臭機
18日前
個人
鼻腔拡張具
28日前
個人
挟圧手工爪矯正具
22日前
個人
口腔ケア用歯ブラシ
28日前
株式会社ダリヤ
皮膚洗浄剤
14日前
株式会社ニデック
眼科装置
11日前
株式会社ニデック
眼科装置
7日前
株式会社コーセー
水系組成物
2か月前
株式会社ダリヤ
染毛剤組成物
1か月前
株式会社ニデック
SLO装置
2か月前
株式会社ニデック
OCT装置
2か月前
株式会社TAT
冷却具
1か月前
株式会社東洋新薬
経口組成物
1か月前
株式会社ノエビア
皮膚外用剤
17日前
株式会社ニデック
眼科測定装置
1か月前
TOTO株式会社
浴室システム
24日前
ライオン株式会社
口腔用組成物
23日前
ロート製薬株式会社
外用組成物
1か月前
株式会社いうら
ストレッチャー
2か月前
共栄化学工業株式会社
抗炎症剤
1か月前
株式会社コーセー
多層型化粧料
2か月前
キヤノン電子株式会社
脱臭装置
11日前
サンスター株式会社
外用組成物
2か月前
株式会社ニデック
眼科測定装置
1か月前
株式会社ニデック
眼科測定装置
1か月前
株式会社八光
カテーテルコネクタ
2か月前
個人
美容スチーマー
1か月前
東邦化学工業株式会社
毛髪化粧料
1か月前
高田製薬株式会社
ラコサミド錠剤
8日前
共栄化学工業株式会社
皮膚外用剤
2か月前
マクセル株式会社
治療装置
1か月前
個人
安心感提供装置
1か月前
株式会社トプコン
眼科装置
14日前
共栄化学工業株式会社
皮膚外用剤
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ