TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024114846
公報種別
公開特許公報(A)
公開日
2024-08-23
出願番号
2024103030,2021139031
出願日
2024-06-26,2021-08-27
発明の名称
物体検知装置および物体検知プログラム
出願人
株式会社デンソー
,
トヨタ自動車株式会社
代理人
弁理士法人ゆうあい特許事務所
主分類
G01S
13/931 20200101AFI20240816BHJP(測定;試験)
要約
【課題】物体の角を検知できる物体検知装置および物体検知プログラムを提供する。
【解決手段】物体検知プログラムを実行する物体検知装置40は、物体が検知されてから現時点までにおいて、車両に対する物体の反射点の相対角度の頻度が最も多い相対角度を算出し、物体が検知されてから現時点までにおける頻度が最も多い相対角度との差の絶対値が所定角度となる第1評価角度よび第1評価角度よりも小さい第2評価角度を算出し、相対角度が第1評価角度以上となるときの頻度が第1閾値以上であるときの反射点が物体の角であると判定し、相対角度が第2評価角度以下となるときの頻度が第2閾値以上であるときの反射点が物体の角であると判定する。
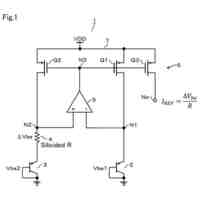
【選択図】図1
特許請求の範囲
【請求項1】
車両(10)の側方に探査波を送信して物体(80)で反射した探査波を受信することにより前記物体を検知する測距センサ(26)を備える前記車両に用いられる物体検知装置であって、
前記物体が検知されてから現時点までにおいて、前記車両に対する前記物体の反射点の相対角度(θcr)の頻度が最も多い前記相対角度を算出する頻度算出部(S206)と、
前記物体が検知されてから現時点までにおける頻度が最も多い前記相対角度との差の絶対値が所定角度Δθとなる第1評価角度(θe1)および前記第1評価角度よりも小さい第2評価角度(θe2)を算出する評価算出部(S208)と、
前記相対角度が前記第1評価角度以上となるときの頻度が第1閾値以上であるときの前記反射点が前記物体の角であると判定し、前記相対角度が前記第2評価角度以下となるときの頻度が第2閾値以上であるときの前記反射点が前記物体の角であると判定する判定部(S212、S214)と、
を備える物体検知装置。
続きを表示(約 450 文字)
【請求項2】
車両(10)の側方に探査波を送信して物体(80)で反射した探査波を受信することにより前記物体を検知する測距センサ(26)を備える前記車両に用いられる物体検知装置を、
前記物体が検知されてから現時点までにおいて、前記車両に対する前記物体の反射点の相対角度(θcr)の頻度が最も多い前記相対角度を算出する頻度算出部(S206)、
前記物体が検知されてから現時点までにおける頻度が最も多い前記相対角度との差の絶対値が所定角度Δθとなる第1評価角度(θe1)および前記第1評価角度よりも小さい第2評価角度(θe2)を算出する評価算出部(S208)、および、
前記相対角度が前記第1評価角度以上となるときの頻度が第1閾値以上であるときの前記反射点が前記物体の角であると判定し、前記相対角度が前記第2評価角度以下となるときの頻度が第2閾値以上であるときの前記反射点が前記物体の角であると判定する判定部(S212、S214)として、機能させる物体検知プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体検知装置および物体検知プログラムに関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、特許文献1に記載されているように、検知センサで得られた自車周辺状況に基づいて、自車周辺の物体の存在の有無を認識するとともに物体の存在の有無を認識できない領域を不特定領域として認識する車両制御装置が知られている。この車両制御装置は、不特定領域には物体が存在するものとして扱う。
【先行技術文献】
【特許文献】
【0003】
特開2021-008224号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者等の検討によれば、特許文献1に記載された車両制御装置は、不特定領域には物体が存在するものとして扱うことで物体の存在の有無を認識するに過ぎず、車両や壁等の物体の角を検知することができない。
【0005】
本開示は、物体の角を検知できる物体検知装置および物体検知プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
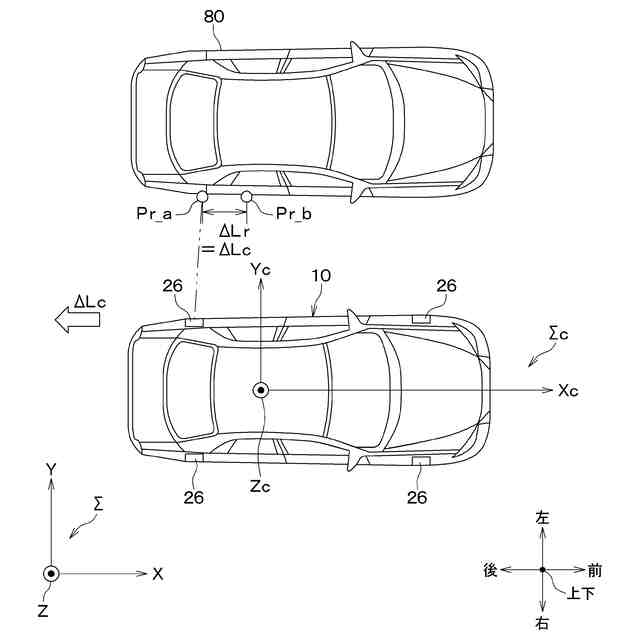
請求項1に記載の発明は、車両(10)の側方に探査波を送信して物体(80)で反射した探査波を受信することにより物体を検知する測距センサ(26)を備える車両に用いられる物体検知装置であって、物体が検知されてから現時点までにおいて、車両に対する物体の反射点の相対角度(θcr)の頻度が最も多い相対角度を算出する頻度算出部(S206)と、物体が検知されてから現時点までにおける頻度が最も多い相対角度との差の絶対値が所定角度Δθとなる第1評価角度(θe1)および第1評価角度よりも小さい第2評価角度(θe2)を算出する評価算出部(S208)と、相対角度が第1評価角度以上となるときの頻度が第1閾値以上であるときの反射点が物体の角であると判定し、相対角度が第2評価角度以下となるときの頻度が第2閾値以上であるときの反射点が物体の角であると判定する判定部(S212、S214)と、を備える物体検知装置である。
【0007】
また、請求項2に記載の発明は、車両(10)の側方に探査波を送信して物体(80)で反射した探査波を受信することにより物体を検知する測距センサ(26)を備える車両に用いられる物体検知装置を、物体が検知されてから現時点までにおいて、車両に対する物体の反射点の相対角度(θcr)の頻度が最も多い相対角度を算出する頻度算出部(S206)、物体が検知されてから現時点までにおける頻度が最も多い相対角度との差の絶対値が所定角度Δθとなる第1評価角度(θe1)および第1評価角度よりも小さい第2評価角度(θe2)を算出する評価算出部(S208)、および、相対角度が第1評価角度以上となるときの頻度が第1閾値以上であるときの反射点が物体の角であると判定し、相対角度が第2評価角度以下となるときの頻度が第2閾値以上であるときの反射点が物体の角であると判定する判定部(S212、S214)として、機能させる物体検知プログラムである。
【0008】
これにより、物体の角を検知することができる。
【0009】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0010】
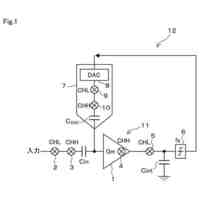
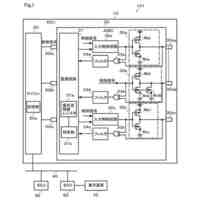
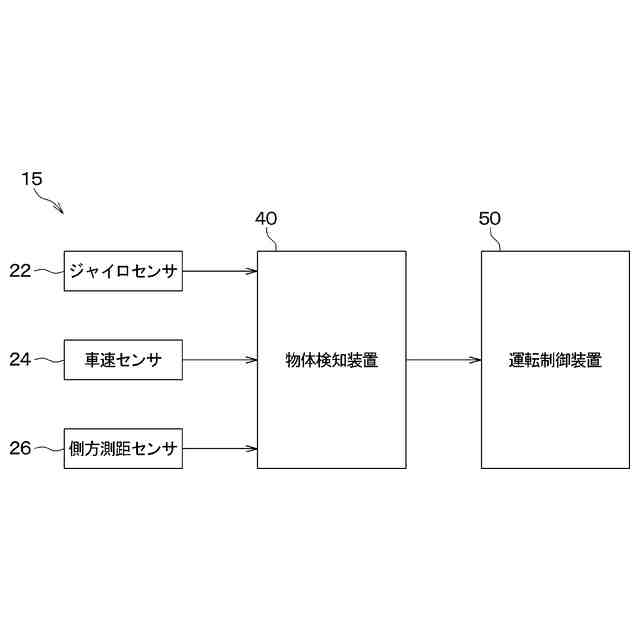
第1実施形態の物体検知装置が用いられる車両のシステムの構成図。
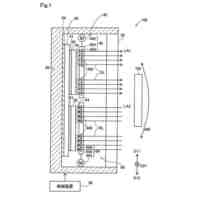
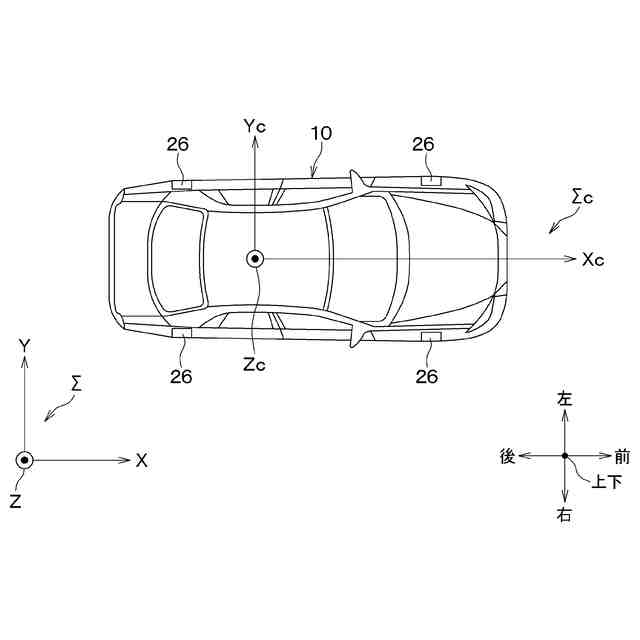
物体検知装置が用いられる車両を示す図。
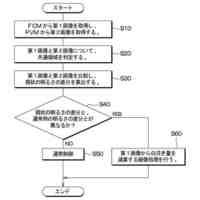
物体検知装置の処理を示すフローチャート。
車両が前方に移動したときの自車移動量と変化量との関係を示す図。
車両が後方に移動したときの自車移動量と変化量との関係を示す図。
車両が前方に移動したときの自車移動量と変化量との関係を示す図。
車両が後方に移動したときの自車移動量と変化量との関係を示す図。
車両が前方に移動したときの自車移動量と変化量との関係を示す図。
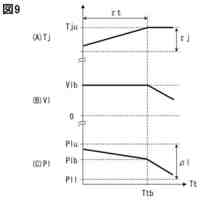
物体角度および変化率閾値の関係を示す図。
物体検知装置の処理を示すタイムチャート。
第2実施形態の物体検知装置の処理を示すフローチャート。
物体検知装置の処理により作成されたヒストグラムの例を示す図。
車両が前方に移動したときの検知角度の変化を示す図。
車両が後方に移動したときの検知角度の変化を示す図。
車両が前方に移動したときの検知角度の変化を示す図。
車両が後方に移動したときの検知角度の変化を示す図。
他の実施形態の物体検知装置の処理を示すフローチャート。
他の実施形態の物体検知装置の処理を示すフローチャート。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
送風機
23日前
株式会社デンソーエレクトロニクス
継電器
16日前
株式会社デンソー
モータ
10日前
株式会社デンソー
変調器
1か月前
株式会社デンソーエレクトロニクス
発音器
11日前
株式会社デンソー
空調装置
28日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
撮像装置
28日前
株式会社デンソー
表示装置
21日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
清掃装置
10日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
表示装置
1か月前
株式会社デンソー
回転電機
10日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
1か月前
株式会社デンソー
表示装置
1か月前
株式会社デンソー
回転電機
15日前
株式会社デンソー
受電装置
11日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
回転電機
15日前
株式会社デンソー
光学部材
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
電流センサ
1か月前
株式会社デンソー
光学センサ
25日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
基準電流源
1か月前
株式会社デンソー
光測距装置
25日前
株式会社デンソー
ロータコア
8日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
位相シフタ
23日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ