TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110131
公報種別
公開特許公報(A)
公開日
2024-08-15
出願番号
2023014519
出願日
2023-02-02
発明の名称
ロボット制御システム
出願人
新明工業株式会社
代理人
弁理士法人岡田国際特許事務所
主分類
B25J
5/00 20060101AFI20240807BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットが備える複数のマニプレータの中の2つが互いに重なった結果として一方のマニプレータの作動が他方のマニプレータによって妨げられることを回避できるロボット制御システムを提供することを目的とする。
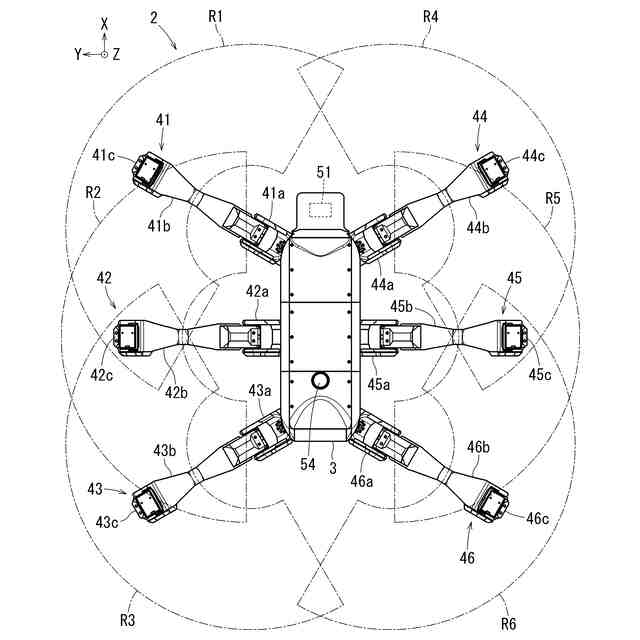
【解決手段】胴体に変位可能に連結された第1及び第2マニプレータの変位量に基づいて、第1及び第2マニプレータを仮想平面に投影すると重なるか否かを判定し、仮想平面にて重なる第1及び第2マニプレータにおける対応位置の仮想平面に対する高さの大小関係に基づいて第1及び第2マニプレータの一方を他方よりも先に変位させる、制御部を備えるロボット制御システム。
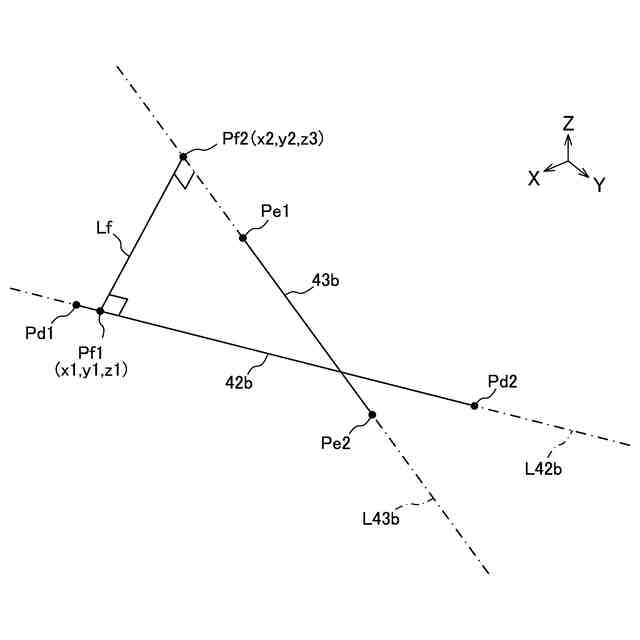
【選択図】図5
特許請求の範囲
【請求項1】
ロボット制御システムであって、
胴体に変位可能に連結された第1及び第2マニプレータと、
前記第1及び第2マニプレータを変位させる第1及び第2アクチュエータと、
前記胴体に対する前記第1及び第2マニプレータの変位量を取得する第1及び第2センサと、
前記第1及び第2マニプレータを制御する制御部を有し、前記制御部は、
前記第1及び第2マニプレータの前記変位量に基づいて、前記第1及び第2マニプレータを仮想平面に投影すると重なるか否かを判定し、
前記仮想平面にて重なる前記第1及び第2マニプレータにおける対応位置の前記仮想平面に対する高さの大小関係に基づいて前記第1及び第2マニプレータの一方が他方よりも先に変位するように前記第1及び第2アクチュエータを制御する、ロボット制御システム。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載のロボット制御システムであって、
前記第1マニプレータは、第1リンクを有し、
前記第2マニプレータは、第2リンクを有し、
前記制御部は、
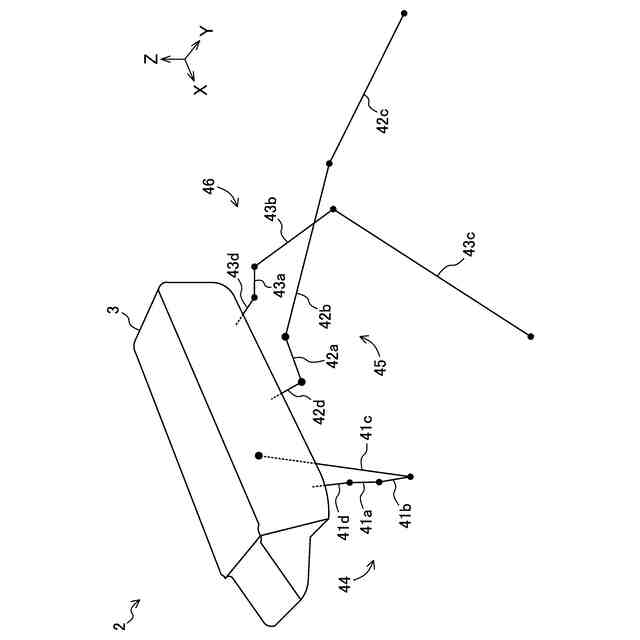
前記第1リンクを表す線分及び前記第2リンクを表す線分を前記仮想平面に投影すると交差する場合に前記第1及び第2マニプレータが重なると判定する、ロボット制御システム。
【請求項3】
請求項1に記載のロボット制御システムであって、
前記胴体に変位可能に連結された第3マニプレータと、
前記第3マニプレータを変位させる第3アクチュエータと、
前記胴体に対する前記第3マニプレータの変位量を取得する第3センサを有し、
前記制御部は、
前記第3マニプレータの前記変位量に基づいて、前記第3マニプレータ及び前記胴体を前記仮想平面に投影すると重なるか否かを判定し、
前記第1及び第2マニプレータの少なくとも一方よりも後に前記胴体に重なる前記第3マニプレータが変位するように前記第1乃至第3アクチュエータを制御する、ロボット制御システム。
【請求項4】
請求項1乃至請求項3の何れか一項に記載のロボット制御システムであって、
前記制御部は、前記第1及び第2マニプレータの先端を地面に接地させ、更に前記胴体を前記地面に対して移動させる、ロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御システムに関する。例えば、ロボットが備えるマニプレータどうしの重複状態に基づいてマニプレータの変位量を制御するロボット制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
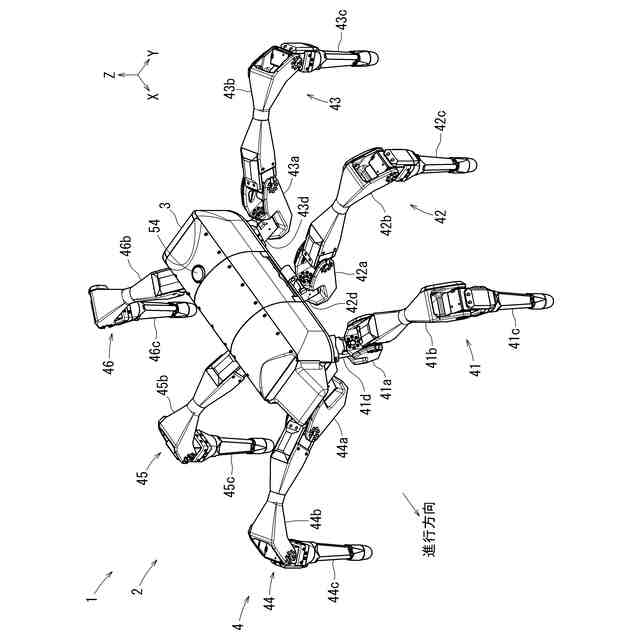
複数のマニプレータ(例えば、ロボットの胴体に連結された脚)を備えるロボットの制御に関して種々の提案がなされている。例えば特許文献1には、転倒した場合に鉛直下方に位置する下側脚が動作可能となるように、鉛直上方に位置する上側脚を地面に対して動作させて姿勢を変更する多脚ロボットが開示されている。この多脚ロボットによれば、転倒した場合、地面又は胴体によって動作が妨げられる可能性が高い下側脚ではなく、上側脚を用いることによって胴体の姿勢を自ら矯正することができる。
【先行技術文献】
【特許文献】
【0003】
特開2017-64835号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、複数のマニプレータの中の2つが互いに交差していると、マニプレータの一方の動作(変位)が他方によって妨げられる可能性がある。マニプレータの交差は、例えば、作動開始時に操作者によってロボットが正しく配置されなかったことにより発生する。しかしながら、特許文献1には、マニプレータが互いに交差した場合の矯正方法は開示されていない。
【0005】
本発明は、このような点に鑑みて創案されたものであり、ロボットが備える複数のマニプレータの中の2つが互いに重なった結果として一方のマニプレータの作動が他方のマニプレータによって妨げられることを回避できるロボット制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
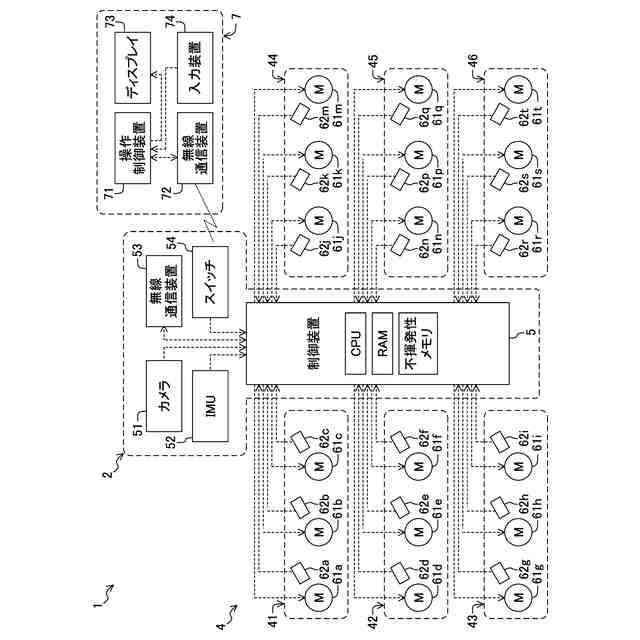
本開示の1つの特徴によると、ロボット制御システムは、胴体に変位可能に連結された第1及び第2マニプレータと、前記第1及び第2マニプレータを変位させる第1及び第2アクチュエータと、前記胴体に対する前記第1及び第2マニプレータの変位量を取得する第1及び第2センサと、前記第1及び第2マニプレータを制御する制御部と、を有する。前記制御部は、前記第1及び第2マニプレータの前記変位量に基づいて、前記第1及び第2マニプレータを仮想平面に投影すると重なるか否かを判定し、前記仮想平面にて重なる前記第1及び第2マニプレータにおける対応位置の前記仮想平面に対する高さの大小関係に基づいて前記第1及び第2マニプレータの一方が他方よりも先に変位するように前記第1及び第2アクチュエータを制御する。
【0007】
第1マニプレータ及び第2マニプレータ(即ち、ロボットが備えるマニプレータの中の2つ)が互いに重なっていると(典型的には、互いに交差していると)、一方のマニプレータを変位させたときに他方のマニプレータに接触して当該一方のマニプレータの変位が妨げられる可能性が高い。この場合、本特徴に係る制御部は、先に変位させるべきマニプレータを仮想平面に対する高さに基づいて決定する。仮想平面に対する高さが高いマニプレータと、高さの低いマニプレータと、の何れを選択するかは、マニプレータの構造及び変位の態様に応じて決定され得る。従って、本特徴によれば、第1マニプレータ及び第2マニプレータが互いに重なった結果として一方のマニプレータの作動が他方のマニプレータによって妨げられる事象の発生を回避できる可能性が高くなる。
【0008】
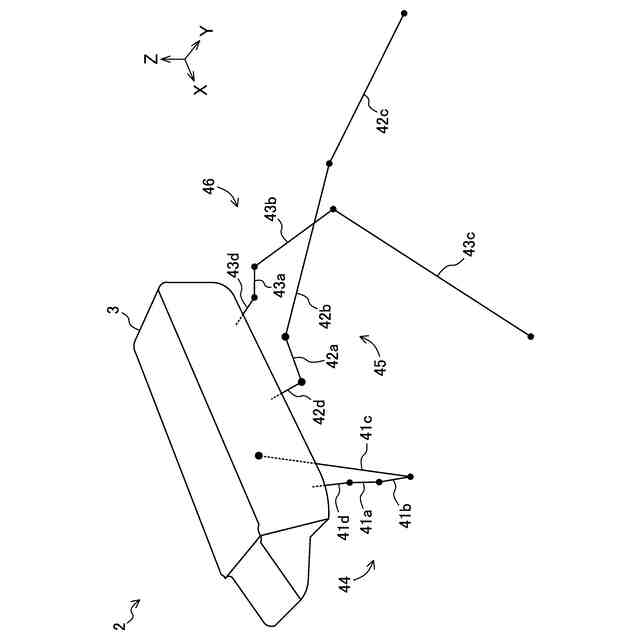
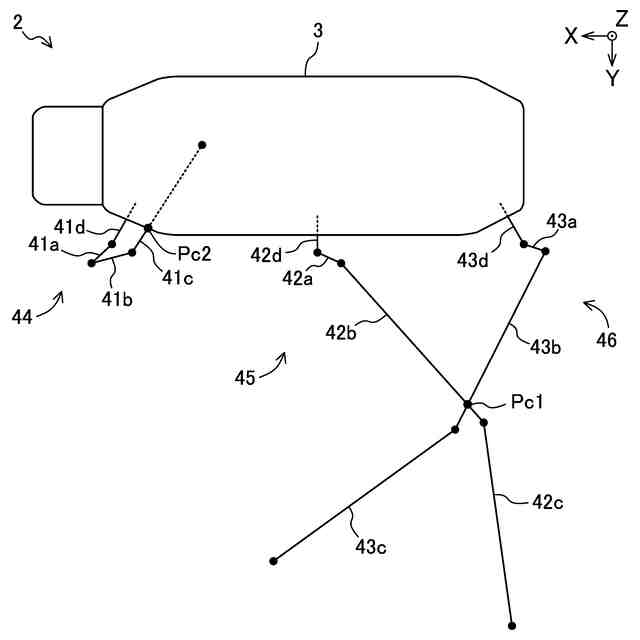
本開示の他の特徴によると、前記第1マニプレータは、第1リンクを有し、前記第2マニプレータは、第2リンクを有し、前記制御部は、前記第1リンクを表す線分及び前記第2リンクを表す線分を前記仮想平面に投影すると交差する場合に前記第1及び第2マニプレータが重なると判定する。
【0009】
本特徴に係る制御部は、例えば、第1マニプレータを構成するリンクの1つ(即ち、第1リンク)、及び第2マニプレータを構成するリンクの1つ(即ち、第2リンク)のそれぞれを仮想平面に仮想的に投射する。次いで、制御部は、投射された線分が仮想平面にて交差しているか否かに応じて第1マニプレータ及び第2マニプレータの重複の有無を判定する。従って、本特徴によれば、制御部は、第1マニプレータと第2マニプレータとが互いに重なっているか否かを容易に判定することができる。
【0010】
本開示の他の特徴によると、前記胴体に変位可能に連結された第3マニプレータと、前記第3マニプレータを変位させる第3アクチュエータと、前記胴体に対する前記第3マニプレータの変位量を取得する第3センサを有し、前記制御部は、前記第3マニプレータの前記変位量に基づいて、前記第3マニプレータ及び前記胴体を前記仮想平面に投影すると重なるか否かを判定し、前記第1及び第2マニプレータの少なくとも一方よりも後に前記胴体に重なる前記第3マニプレータが変位するように前記第1乃至第3アクチュエータを制御する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
ブレーキアシスト装置
24日前
新明工業株式会社
車両搭載型舗装用材料散布装置とそれを搭載した舗装用材料散布車
2か月前
株式会社ザイテック
吸着装置
7日前
日東精工株式会社
電動ドライバ
1か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
今日
株式会社ダイヘン
搬送装置
今日
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
22日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
学校法人五島育英会
アーム機構
1か月前
住友重機械工業株式会社
支援装置
今日
株式会社PILLAR
チューブ保持治具
1か月前
住友重機械工業株式会社
支援装置
今日
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
28日前
アピュアン株式会社
衝撃工具
2日前
ホシデン株式会社
分解用治具
今日
オークラ輸送機株式会社
ハンド装置
15日前
株式会社マキタ
電動作業機
1か月前
川崎重工業株式会社
ロボットシステム
16日前
株式会社リコー
多関節ロボット
今日
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社ジャノメ
ロボット
24日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社ダイヘン
ロボット制御システム
1か月前
セイコーエプソン株式会社
ロボット
1か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
セイコーエプソン株式会社
ロボット
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ