TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024098545
公報種別
公開特許公報(A)
公開日
2024-07-24
出願番号
2023002090
出願日
2023-01-11
発明の名称
サスペンションシステム
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60G
17/015 20060101AFI20240717BHJP(車両一般)
要約
【課題】スカイフック制御におけるゲインを状況に応じて最適化可能なサスペンションシステムを提供する。
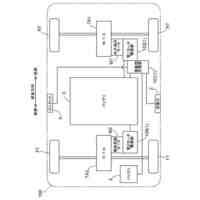
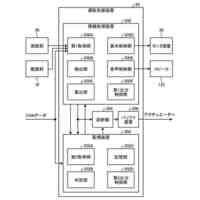
【解決手段】実施形態のサスペンションシステムは、車輪と車体との間に介在され、減衰力を変更可能なショックアブソーバと、路面入力の大きさを示す路面入力値を入力として、路面の上下方向の変位量に対する車両のばね上部分の上下方向の変位量の割合を示す伝達比の目標値である目標伝達比を最適化するためのモデルを生成する強化学習を実行する学習処理部と、モデルから出力された目標伝達比に基づいて、スカイフック理論におけるゲインを算出するゲイン演算部と、路面入力値とゲインとに基づいて、減衰力の目標値である目標減衰力を算出する減衰力演算部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
路面から車両の車体への衝撃を緩和するサスペンションシステムであって、
車輪と前記車体との間に介在され、減衰力を変更可能なショックアブソーバと、
路面入力の大きさを示す路面入力値を入力として、前記路面の上下方向の変位量に対する前記車両のばね上部分の上下方向の変位量の割合を示す伝達比の目標値である目標伝達比を最適化するためのモデルを生成する強化学習を実行する学習処理部と、
前記モデルから出力された前記目標伝達比に基づいて、スカイフック理論におけるゲインを算出するゲイン演算部と、
前記路面入力値と前記ゲインとに基づいて、前記減衰力の目標値である目標減衰力を算出する減衰力演算部と、
を備えるサスペンションシステム。
続きを表示(約 290 文字)
【請求項2】
前記路面入力値は、前記ばね上部分の変位の加速度を示すばね上加速度又は前記ばね上部分の変位の速度を示すばね上速度を含む、
請求項1に記載のサスペンションシステム。
【請求項3】
前記路面入力値は、前記ショックアブソーバの伸縮速度を示すストローク速度を更に含む、
請求項2に記載のサスペンションシステム。
【請求項4】
前記減衰力演算部により算出された前記目標減衰力に基づいて、前記ショックアブソーバの前記減衰力を変化させるアクチュエータを制御する駆動制御部、
を更に備える請求項1に記載のサスペンションシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、サスペンションシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自動車等の車両において、路面から車体への衝撃を緩和するシステムとして状況に応じて減衰力を変更可能なショックアブソーバを利用したアクティブサスペンションシステムが利用されている。また、ショックアブソーバの減衰力を制御する手法として、車体を空中に吊り下げた状態を仮定して減衰力を算出するスカイフック理論に基づく制御(スカイフック制御)が知られている。スカイフック制御においては、路面入力の大きさを示す値(例えばばね上加速度等)と、予め定められたゲインと、に基づいて、ショックアブソーバの減衰力の目標値である目標減衰力が算出される。
【先行技術文献】
【特許文献】
【0003】
特開2011-131876号公報
特開2019-135120号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなスカイフック制御におけるゲインは、事前に行われた走行実験やシミュレーションの結果等に基づいて、予め固定値として設定されることが多い。しかしながら、このように定められたゲインを用いてスカイフック制御を行うと、システム内で生じる遅延等の影響により、実際の状況(路面状態や走行状態等)に応じて適切な目標減衰力を算出できない可能性がある。
【0005】
そこで、本発明の実施形態は、スカイフック制御におけるゲインを状況に応じて最適化可能なサスペンションシステムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の一実施形態は、路面から車両の車体への衝撃を緩和するサスペンションシステムであって、車輪と車体との間に介在され、減衰力を変更可能なショックアブソーバと、路面入力の大きさを示す路面入力値を入力として、路面の上下方向の変位量に対する車両のばね上部分の上下方向の変位量の割合を示す伝達比の目標値である目標伝達比を最適化するためのモデルを生成する強化学習を実行する学習処理部と、モデルから出力された目標伝達比に基づいて、スカイフック理論におけるゲインを算出するゲイン演算部と、路面入力値とゲインとに基づいて、減衰力の目標値である目標減衰力を算出する減衰力演算部と、を備えることを特徴とする。
【0007】
上記構成によれば、車両の走行中に取得される路面入力値を用いた強化学習により、目標伝達比を最適化するためのモデルが生成される。そして、当該モデルにより路面状態等を含む状況に適合した目標伝達比が推定され、当該目標伝達比に基づいてスカイフック理論におけるゲインが算出され、当該ゲインに基づいてショックアブソーバの目標減衰力が算出される。これにより、走行中における状況に応じてスカイフック理論におけるゲインが最適化され、車両の走行安定性を向上させることができる。
【0008】
また、上記構成において、路面入力値は、ばね上部分の変位の加速度を示すばね上加速度又はばね上部分の変位の速度を示すばね上速度を含んでもよい。
【0009】
上記構成によれば、路面入力に応じて変化するパラメータであるばね上加速度又はばね上速度を利用して、モデルを生成するための強化学習を効率的に実行できる。
【0010】
また、上記構成において、路面入力値は、ショックアブソーバの伸縮速度を示すストローク速度を更に含んでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
金型
8日前
株式会社アイシン
加湿器
8日前
株式会社アイシン
加湿器
7日前
株式会社アイシン
管理装置
今日
株式会社アイシン
電源装置
8日前
株式会社アイシン
エンジン
2日前
株式会社アイシン・ロジテクサービス
搬送容器
7日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
差動ギヤ装置
8日前
株式会社アイシン
冷却システム
8日前
株式会社アイシン
周辺表示装置
7日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
発電システム
1日前
株式会社アイシン
画像処理装置
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
サンルーフ装置
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
塗膜剥離処理方法
3日前
株式会社アイシン
駐車支援システム
3日前
株式会社アイシン
駐車支援システム
7日前
株式会社アイシン
バッテリ冷却装置
8日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ