TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146065
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058768
出願日
2023-03-31
発明の名称
駐車支援装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/06 20060101AFI20241004BHJP(車両一般)
要約
【課題】駐車支援中に自車両が段差を乗り越える場合の乗り心地の悪化を抑制する。
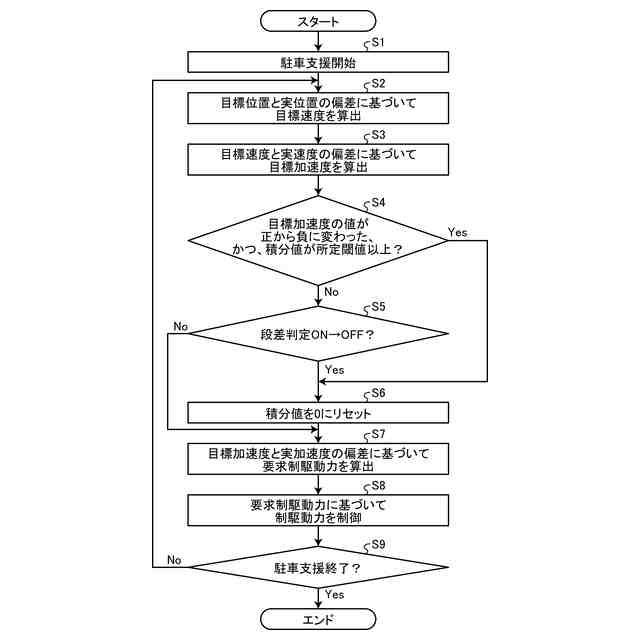
【解決手段】実施形態の駐車支援装置は、自車両の駐車の目標位置へ前記自車両を移動させるための目標加速度を算出する目標加速度算出部と、積分項を含むフィードバック制御によって前記自車両の前記目標加速度と実加速度の偏差に基づいて要求制駆動力を算出するとともに、前記自車両が段差を乗り越えたか否かを判定し、前記自車両が段差を乗り越えたと判定した場合、前記目標加速度と実加速度の偏差の積分値を0にリセットする加速度フィードバック制御部と、前記要求制駆動力に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える。
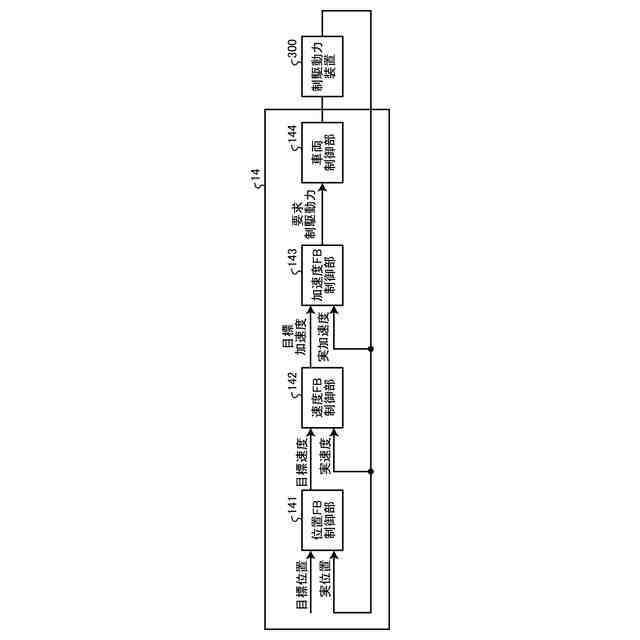
【選択図】図9
特許請求の範囲
【請求項1】
自車両の駐車の目標位置へ前記自車両を移動させるための目標加速度を算出する目標加速度算出部と、
積分項を含むフィードバック制御によって前記自車両の前記目標加速度と実加速度の偏差に基づいて要求制駆動力を算出するとともに、前記自車両が段差を乗り越えたか否かを判定し、前記自車両が段差を乗り越えたと判定した場合、前記目標加速度と実加速度の偏差の積分値を0にリセットする加速度フィードバック制御部と、
前記要求制駆動力に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える駐車支援装置。
続きを表示(約 360 文字)
【請求項2】
前記加速度フィードバック制御部は、
前記目標加速度の値が正から負に変わったときに前記積分値が所定閾値以上である場合に、前記自車両が段差を乗り越えたと判定し、前記目標加速度と実加速度の偏差の積分値を0にリセットする、請求項1に記載の駐車支援装置。
【請求項3】
前記加速度フィードバック制御部は、
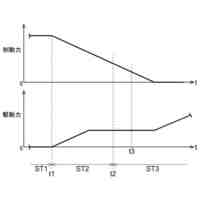
走行していた前記自車両が停止し、かつ、前記目標加速度の値が正である、という状態の継続時間が、予め定められた段差判定オン時間を超え、
その後、前記自車両が走行している状態の継続時間が、予め定められた段差判定オフ時間を超えた場合に、
前記自車両が段差を乗り越えたと判定し、前記目標加速度と実加速度の偏差の積分値を0にリセットする、請求項1に記載の駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、駐車支援装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、車両(乗用車など)の駐車支援装置が研究開発され、使用されている。駐車支援装置では、例えば、ECU(Electronic Control Unit)によって制駆動力(制動力と駆動力)制御や操舵制御を行うことで、駐車を支援する。制駆動力制御では、例えば、FB(Feedback)制御を用いる。
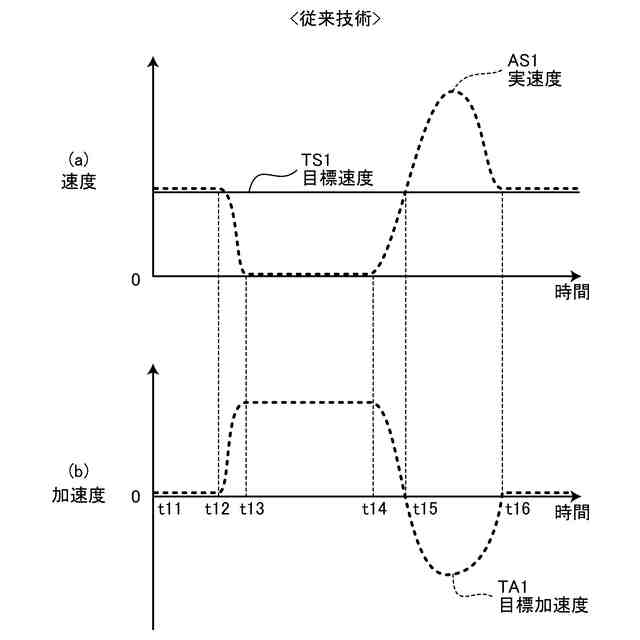
【0003】
具体的には、例えば、まず、自車両の駐車目標位置と実位置の偏差に基づいて目標速度を算出する。次に、目標速度と実速度の偏差に基づいて目標加速度を算出する。次に、目標加速度と実加速度の偏差に基づいて要求制駆動力を算出する。そして、要求制駆動力に基づいて自車両の制駆動力を制御する。
【0004】
また、FB制御として、PI(Proportional-Integral)制御やPID(Proportional-Integral-Differential)制御を用いる場合、偏差を積分するI制御を行うことになる。例えば、PI制御によって目標加速度と実加速度の偏差(以下、「当該偏差」ともいう。)に基づいて要求制駆動力を算出するときに、I制御が入っていることで、外乱要素(路面環境や段差など)による影響を低減することができる。
【先行技術文献】
【特許文献】
【0005】
特許5660851号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
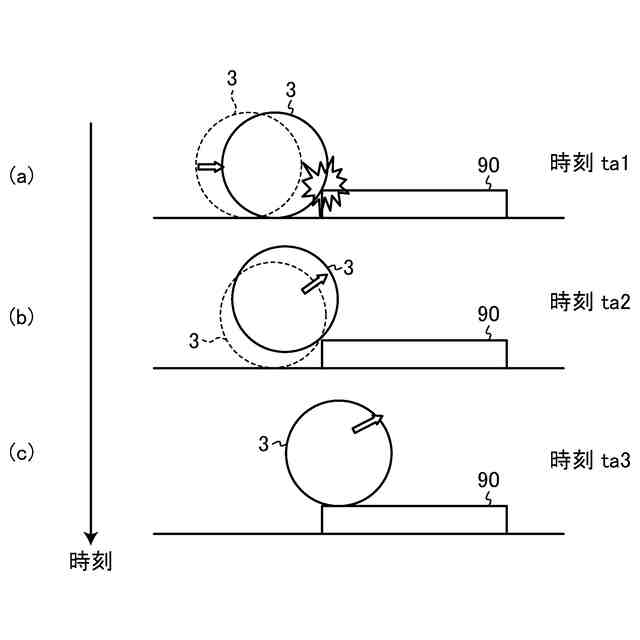
しかしながら、上述の従来技術では、例えば、車両が段差を乗り越える場合に、段差を乗り越える直前に当該偏差の積分値が大きくなっている。したがって、その状態で車両が段差を乗り越えると、トルクが急激に小さくなってしまうため、大きな積分値に起因して要求駆動力が大きくなり、車両の乗り心地が悪化してしまうという問題がある。
【0007】
そこで、本発明は、上記事情に鑑みてなされたものであり、駐車支援中に自車両が段差を乗り越える場合の乗り心地の悪化を抑制可能な駐車支援装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、実施形態の駐車支援装置は実施形態の駐車支援装置は、自車両の駐車の目標位置へ前記自車両を移動させるための目標加速度を算出する目標加速度算出部と、積分項を含むフィードバック制御によって前記自車両の前記目標加速度と実加速度の偏差に基づいて要求制駆動力を算出するとともに、前記自車両が段差を乗り越えたか否かを判定し、前記自車両が段差を乗り越えたと判定した場合、前記目標加速度と実加速度の偏差の積分値を0にリセットする加速度フィードバック制御部と、前記要求制駆動力に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える。
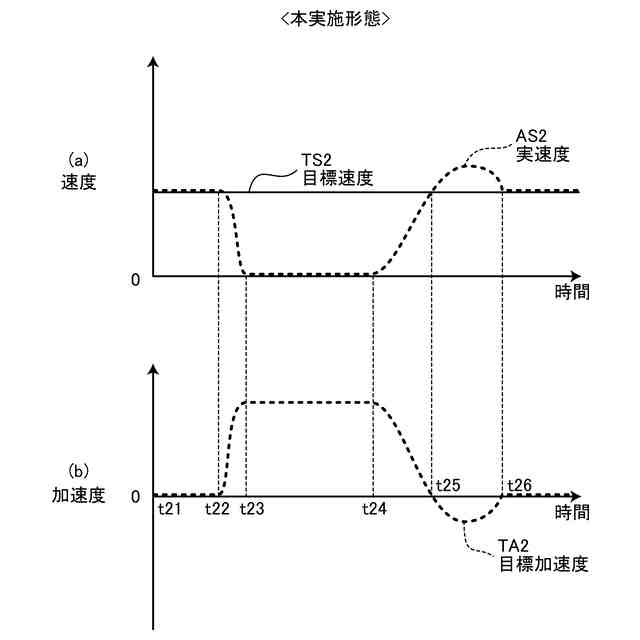
【0009】
この構成により、自車両が段差を乗り越えたと判定した場合に、目標加速度と実加速度の偏差の積分値を0にリセットすることで、自車両が段差を乗り越える場合の乗り心地の悪化を抑制することができる。
【0010】
また、実施形態の駐車支援装置において、前記加速度フィードバック制御部は、前記目標加速度の値が正から負に変わったときに前記積分値が所定閾値以上である場合に、前記自車両が段差を乗り越えたと判定し、前記目標加速度と実加速度の偏差の積分値を0にリセットする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン・ロジテクサービス
搬送容器
7日前
株式会社アイシン
エンジン
2日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
発電システム
1日前
株式会社アイシン
画像処理装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
サンルーフ装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
塗膜剥離処理方法
3日前
株式会社アイシン
駐車支援システム
3日前
株式会社アイシン
駐車支援システム
3日前
株式会社アイシン
駐車支援システム
3日前
株式会社アイシン
駐車支援システム
3日前
株式会社アイシン
回転電機用ステータ
3日前
株式会社アイシン
配送経路決定システム
3日前
トヨタ自動車株式会社
運転者監視装置、運転者監視方法及びプログラム
1日前
トヨタ自動車株式会社
車両の制御装置、車両制御方法及びコンピュータプログラム
3日前
個人
車両用エアー傘
3か月前
個人
電池交換式自動車
2か月前
個人
自動車盗難防止装置
3か月前
個人
荷台雨除け装置
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ