TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024146064
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058767
出願日
2023-03-31
発明の名称
運転支援装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/10 20060101AFI20241004BHJP(車両一般)
要約
【課題】自動運転において、制動力が正しく制御されているかを車両の状況に応じて監視することができる運転支援装置を提供すること。
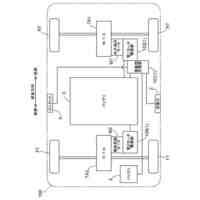
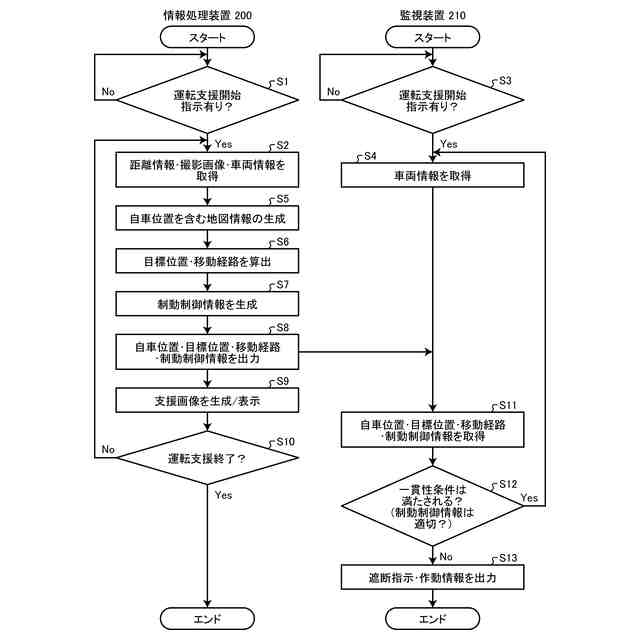
【解決手段】車両に実装される運転支援装置であって、情報処理部と、監視部と、遮断部とを備える。情報処理部は、車両の状態を示す情報であり当該車両から取得された車両情報と、車両から当該車両の周辺に存在する物体までの測定距離に関する情報である測距情報とを少なくとも用いて、車両の自車位置情報と、車両の目標位置情報と、移動経路情報と、車両の制動制御情報とを少なくとも生成する。監視部は、車両から取得された車両情報と、情報処理部が生成した目標位置情報と、自車位置情報と、移動経路情報とを用いて、制動制御情報の適否を判定する。
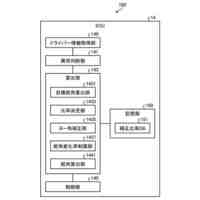
【選択図】図3
特許請求の範囲
【請求項1】
車両に実装される運転支援装置であって、
前記車両の状態を示す情報であり当該車両から取得された車両情報と、前記車両から当該車両の周辺に存在する物体までの測定距離に関する情報である測距情報とを少なくとも用いて、前記車両の自車位置情報と、前記車両の目標位置情報と、移動経路情報と、前記車両の制動制御情報とを少なくとも生成する情報処理部と、
前記車両から取得された前記車両情報と、前記情報処理部が生成した前記目標位置情報と、前記自車位置情報と、前記移動経路情報とを用いて、前記制動制御情報の適否を判定する監視部と、
を備えた運転支援装置。
続きを表示(約 560 文字)
【請求項2】
前記監視部は、
前記車両情報に基づく前記車両の進行方向と前記自車位置情報を基準とする前記目標位置情報の方向とが一致すること、
前記自車位置情報と前記目標位置情報とに基づく距離が第1基準値よりも短い場合に、前記車両が減速状態にあること、
更新された前記移動経路情報から得られる移動経路の長さが前記自車位置情報及び前記目標位置情報から算出される直線距離よりも長く、第2基準値を越えないこと、
のうちの少なくともいずれか満たさない場合には、前記制動制御情報は不適と判定する、
請求項1に記載の運転支援装置。
【請求項3】
前記第1基準値は、前記自車位置情報と前記目標位置情報とに基づく距離に応じて異なり、
前記第2基準値は、前記移動経路情報から得られる前記移動経路の長さに応じて異なる、
請求項2に記載の運転支援装置。
【請求項4】
前記監視部により前記制動制御情報が不適と判定された場合には、前記情報処理部から前記車両の制御部への前記制動制御情報の出力を遮断し、前記制御部に対して前記車両の停止を指示する信号を出力する遮断部をさらに備える、
請求項1乃至3のうちいずれか一項に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
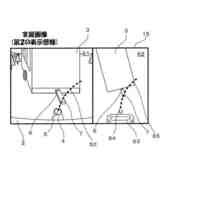
近年、ユーザの運転操作に基づく手動走行以外に、ユーザの運転操作の一部又は全てを車両側で実行することによりユーザの運転を支援する自動運転支援システムが提案されている。自動運転支援システムでは、例えば、制動力を制御し目標位置に自車両を停車させる運転支援技術が利用される。
【0003】
この種の技術では、制動力を制御する装置と、当該装置が正しく動作しているかを監視する監視装置とを用いた監視システムが利用される。例えば、特許文献1では、車載用電子制御ユニットにおいて、メインCPUを監視するサブCPUが、予め準備されたチェックデータ及び正解データと、メインCPUがチェックデータに基づいて算出した結果データとを照合し、メインCPUの動作をチェックする監視システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平9-305223号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の技術では、車両の状態に応じた監視を行うことができない。例えば特許文献1では、車両の状態とは関係のない予め準備されたチェックデータ及び正解データを利用する監視システムであるため、車両の状態に応じた監視を行うことができない。監視システムにおいて、車両の状態に応じた客観性の高い監視を実行することができれば有益である。
【0006】
そこで、本発明の実施形態の課題の一つは、自動運転支援における制動力制御について、車両の状態に応じた客観性の高い監視を実行することができる運転支援装置を提供することである。
【課題を解決するための手段】
【0007】
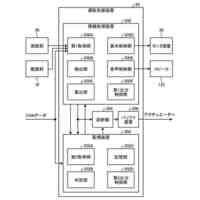
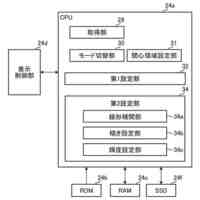
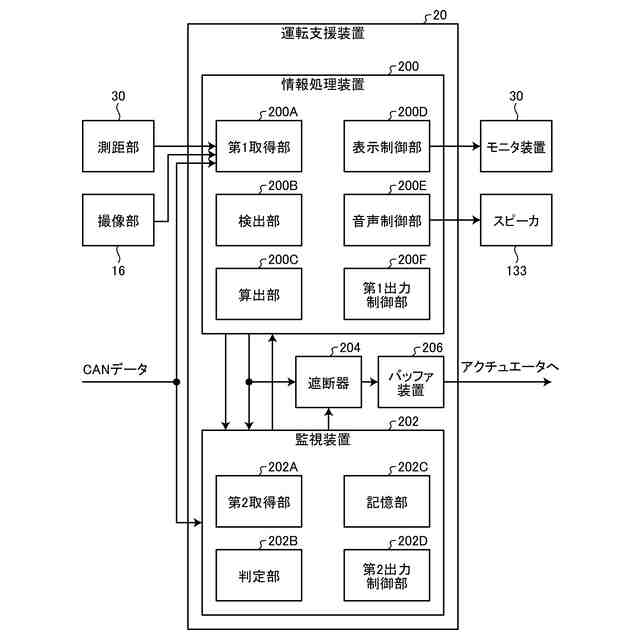
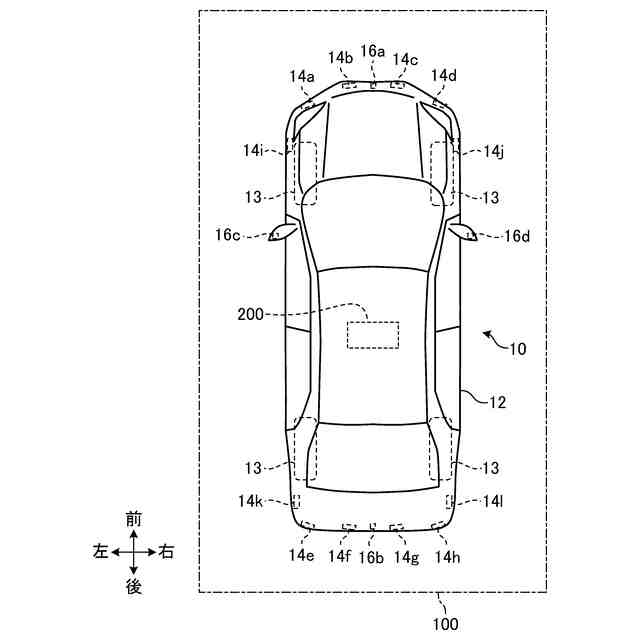
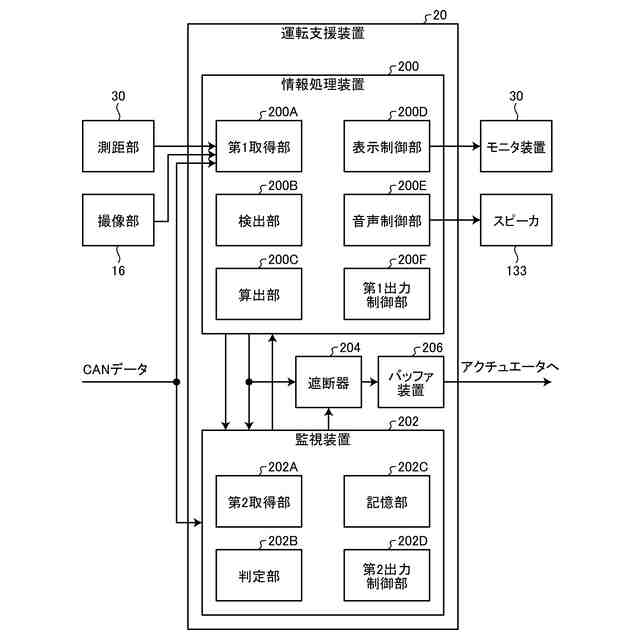
実施形態の運転支援装置は、車両に実装される運転支援装置であって、情報処理部と、監視部と、遮断部とを備える。前記情報処理部は、前記車両の状態を示す情報であり当該車両から取得された車両情報と、前記車両から当該車両の周辺に存在する物体までの測定距離に関する情報である測距情報とを少なくとも用いて、前記車両の自車位置情報と、前記車両の目標位置情報と、移動経路情報と、前記車両の制動制御情報とを少なくとも生成する。前記監視部は、前記車両から取得された前記車両情報と、前記情報処理部が生成した前記目標位置情報と、前記自車位置情報と、移動経路情報とを用いて、前記制動制御情報の適否を判定する。
【0008】
このような構成によれば、自動運転において、制動力が正しく制御されているかを車両の状況に応じて客観的に監視することができる。
【0009】
前記運転支援装置では、例えば、前記監視部は、前記車両情報に基づく前記車両の進行方向と前記自車位置情報を基準とする前記目標位置情報の方向とが一致すること、前記自車位置情報と前記目標位置情報とに基づく距離が第1基準値よりも短い場合に、前記車両が減速状態にあること、更新された前記移動経路情報から得られる移動経路の長さが前記自車位置情報及び前記目標位置情報から算出される直線距離よりも長く、第2基準値を越えないこと、のうちの少なくともいずれか満たさない場合には、前記制動制御情報は不適と判定する。
【0010】
従って、情報処理部によって生成され出力された情報、及びその情報間に一貫性(整合性)があるかを、情報処理部の出力とは関係しない車両情報を利用して検証することができる。その結果、自動運転支援における制動力制御について、車両の状態に応じた客観性の高い監視を実行することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
金型
8日前
株式会社アイシン
加湿器
8日前
株式会社アイシン
加湿器
7日前
株式会社アイシン
電源装置
8日前
株式会社アイシン
エンジン
2日前
株式会社アイシン
検査装置
8日前
株式会社アイシン・ロジテクサービス
搬送容器
7日前
株式会社アイシン
ダンパ装置
8日前
株式会社アイシン
ダンパ装置
8日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
周辺表示装置
7日前
株式会社アイシン
発電システム
1日前
株式会社アイシン
冷却システム
8日前
株式会社アイシン
差動ギヤ装置
8日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
運転支援装置
8日前
株式会社アイシン
ヒートシンク
3日前
株式会社アイシン
車両制御装置
8日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
駐車支援装置
3日前
株式会社アイシン
画像処理装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
ロータリバルブ
3日前
株式会社アイシン
車両用駆動装置
8日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
サンルーフ装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用受電装置
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
車両用駆動装置
3日前
株式会社アイシン
車両用受電装置
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ