TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024090774
公報種別
公開特許公報(A)
公開日
2024-07-04
出願番号
2022206873
出願日
2022-12-23
発明の名称
画像処理装置、画像処理装置の制御方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
主分類
G06F
3/04845 20220101AFI20240627BHJP(計算;計数)
要約
【課題】編集に関する操作の後の3次元仮想物体を操作者の意図する状態に移行させる可能性を高めることができる画像処理装置、画像処理装置の制御方法、及びプログラムを提供することを目的とする。
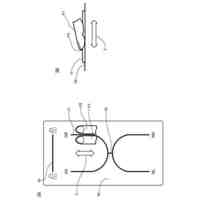
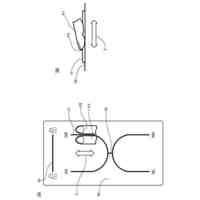
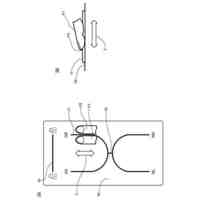
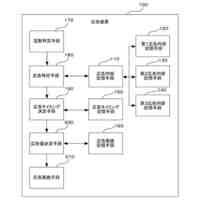
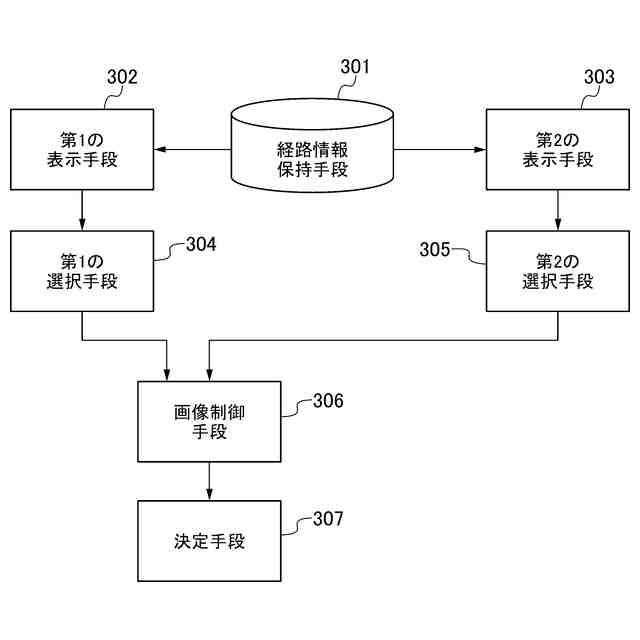
【解決手段】操作者によって3次元仮想物体201の編集に関する操作が行われるヘッドマウントディスプレイ100は、操作の後に第1経路209を表示する第1の表示手段302と、操作の後に第1経路209とは異なる第2経路210を表示する第2の表示手段303と、第1経路209上のいずれかの座標を操作者が選択することを可能とする第1の選択手段304と、第2経路210上のいずれかの座標を操作者が選択することを可能とする第2の選択手段305と、第1の選択手段304または第2の選択手段305で操作者が選択した座標に基づいて3次元仮想物体201の状態を決定する決定手段307と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
操作者によって3次元仮想物体の編集に関する操作が行われる画像処理装置であって、
前記操作の後に第1経路を表示する第1の表示手段と、
前記操作の後に前記第1経路とは異なる第2経路を表示する第2の表示手段と、
前記第1経路上のいずれかの座標を操作者が選択することを可能とする第1の選択手段と、
前記第2経路上のいずれかの座標を操作者が選択することを可能とする第2の選択手段と、
前記第1の選択手段または前記第2の選択手段で操作者が選択した座標に基づいて前記3次元仮想物体の状態を決定する決定手段と、を備えることを特徴とする画像処理装置。
続きを表示(約 890 文字)
【請求項2】
前記操作は、前記3次元仮想物体の編集を取り消す操作であることを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記3次元仮想物体の編集は、ハンドインタラクションにおける操作者の手の軌跡を用いて行われることを特徴とする請求項1に記載の画像処理装置。
【請求項4】
前記第1の表示手段は、前記軌跡を前記第1経路として表示することを特徴とする請求項3に記載の画像処理装置。
【請求項5】
前記第2の表示手段は、前記軌跡の始点と終点を結んだ直線を前記第2経路として表示することを特徴とする請求項3に記載の画像処理装置。
【請求項6】
前記第2の表示手段は、関数で表された前記軌跡の始点から終点までの経路を前記第2経路として表示することを特徴とする請求項3に記載の画像処理装置。
【請求項7】
前記第2の表示手段は、異なる複数の関数が複合することで表された前記軌跡の始点から終点までの経路を前記第2経路として表示することを特徴とする請求項3に記載の画像処理装置。
【請求項8】
前記第1の表示手段は、前記第1経路の終点から前記第1経路が延長された線分を第1追加経路として表示し、
前記第1追加経路は、前記第1経路の始点から前記終点に前記第1経路に従って進行した際の前記終点における進行方向へ延びていることを特徴とする請求項1に記載の画像処理装置。
【請求項9】
前記第2の表示手段は、前記第2経路の終点から前記第2経路が延長された線分を第2追加経路として表示し、
前記第2追加経路は、前記第2経路の始点から前記終点に前記第2経路に従って進行した際の前記終点における進行方向へ延びていることを特徴とする請求項1に記載の画像処理装置。
【請求項10】
操作者の手の移動速度に基づいて前記3次元仮想物体の画像を制御する画像制御手段を備えることを特徴とする請求項1に記載の画像処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置、画像処理装置の制御方法、及びプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、拡張現実(AR)や複合現実(MR)に代表されるように、現実と仮想を併せ持った環境での体験を操作者に提供する技術が発展している。そのような技術は、操作者に対して、例えば、頭部に装着したヘッドマウントディスプレイ(以下、「HMD」という)により、現実世界のビデオ画像に仮想物体を重畳した複合世界を見せることができる。さらに、複合現実(MR)では、操作者は、各種センサによりとらえられた手の動きによって、あたかも自身の手で3次元仮想物体の移動、拡大・縮小、回転などを行っているような感覚で、3次元仮想物体の編集を行うことができる。とはいうものの、3次元仮想物体を操作者の思い通りに編集することは、一般的に難しい。なぜなら、操作者が手を精密に動かすのには訓練が必要で、また、センサの精度も編集結果に影響するからである。そこで、特許文献1には、操作者が編集の取り消しを望んだ場合に、その取り消し後に移行する編集状態の候補(以下、「候補」という)として、操作者の操作軌跡に基づく履歴の中間状態を表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5898830号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、操作者の操作軌跡に基づく履歴の中間状態の表示であっても、操作者の意図する候補の表示でない場合があるという問題があった。具体的に説明すると、例えば、3次元空間における操作方法のひとつとして、操作者の手を画像認識して、その手の動きから3次元仮想物体の編集を行うハンドインタラクションを考える。ハンドインタラクションによる編集においては、上述したように、操作者が手を精密に動かすのには訓練が必要であり、また、センサの精度によっては、操作者の手の揺れまでも忠実に再現する場合や、逆に操作者の手の軌跡を忠実に再現できない場合もある。このような状況下では、編集に関する操作の後に3次元仮想物体の状態を過去に遡って表示しても、操作者の意図する候補の表示とならない場合があった。
【0005】
本発明は、上記の課題に鑑みてなされたものである。本発明は、編集に関する操作の後の3次元仮想物体を操作者の意図する状態に移行させる可能性を高めることができる画像処理装置、画像処理装置の制御方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の画像処理装置は、操作者によって3次元仮想物体の編集に関する操作が行われる画像処理装置であって、前記操作の後に第1経路を表示する第1の表示手段と、前記操作の後に前記第1経路とは異なる第2経路を表示する第2の表示手段と、前記第1経路上のいずれかの座標を操作者が選択することを可能とする第1の選択手段と、前記第2経路上のいずれかの座標を操作者が選択することを可能とする第2の選択手段と、前記第1の選択手段または前記第2の選択手段で操作者が選択した座標に基づいて前記3次元仮想物体の状態を決定する決定手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、編集に関する操作の後の3次元仮想物体を操作者の意図する状態に移行させる可能性を高めることができる。
【図面の簡単な説明】
【0008】
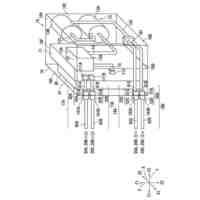
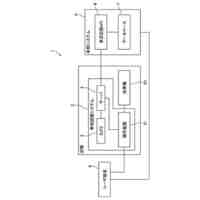
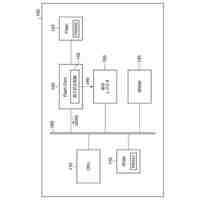
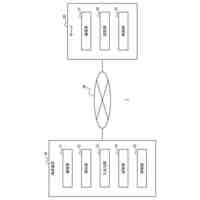
HMD100の構成を示す図である。
第1実施形態においてHMD100が表示する画像の一例を示す図である。
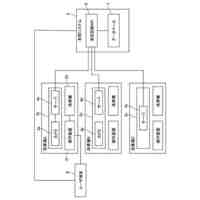
HMD100のソフトウェア論理構成を示す図である。
第1実施形態における経路情報保持手段301の一例を示す図である。
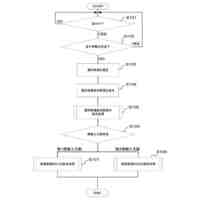
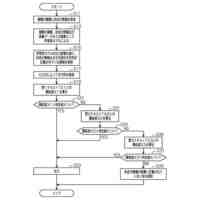
第1実施形態において第1の表示手段302を実現するためのフローチャートである。
第1の選択手段304を実現するためのフローチャートである。
画像制御手段306を実現するためのフローチャートである。
決定手段307を実現するためのフローチャートである。
第2実施形態においてHMD100が表示する画像の一例を示す図である。
第2実施形態における経路情報保持手段301の一例を示す図である。
第2実施形態において第1の表示手段302を実現するためのフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の各実施形態について図面を参照しながら詳細に説明する。ただし、以下の各実施形態に記載されている構成はあくまで例示に過ぎず、本発明の範囲は各実施形態に記載されている構成によって限定されることはない。例えば、本発明を構成する各部は、同様の機能を発揮し得る任意の構成のものと置換することができる。また、任意の構成物が付加されていてもよい。また、各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせることもできる。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
【0010】
<第1実施形態>
以下、図1~図7を参照して、第1実施形態について説明する。図1は、本発明を適用可能な画像処理装置の一例としてのHMD100の構成を示す図である。HMD100は、CPU101、ROM102、RAM103、I/F104、およびバス105などを有している。CPU101、ROM102、RAM103、およびI/F104のそれぞれは、バス105で接続されている。CPU101はプロセッサ、ROM102はリードオンリメモリ、RAM103はランダムアクセスメモリ、I/F104は外部インタフェースを示している。HMD100の動作は、ROM102やRAM103に記録されたプログラムの実行によって実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
環境情報処理装置
18日前
個人
外食予約システム
18日前
個人
電子文書の閲覧用電子機器
4日前
個人
海外在住支援システム
18日前
ニデック株式会社
冷却装置
12日前
個人
サービス提供システム
11日前
個人
施術スタッフ育成システム
5日前
株式会社ワコム
電子ペン
21日前
東洋電装株式会社
操作装置
21日前
東洋電装株式会社
操作装置
21日前
東洋電装株式会社
操作装置
21日前
株式会社SUBARU
画像処理装置
5日前
日本信号株式会社
料金精算システム
1か月前
株式会社SUBARU
操作制御装置
11日前
学校法人修道学園
農地集約システム
11日前
株式会社カロニマ
情報発信システム
25日前
旭精工株式会社
管理装置および管理システム
11日前
株式会社京南
洗車システム
4日前
株式会社京南
洗車システム
4日前
株式会社デンソー
表示装置
7日前
ローム株式会社
電源制御集積回路
18日前
シーアンドアールエム株式会社
広告装置
28日前
株式会社and.d
商品の推奨方法
20日前
株式会社豊田自動織機
物体検出装置
18日前
個人
取引システム、取引方法及び取引プログラム
19日前
富士フイルム株式会社
タッチセンサ
28日前
三浦工業株式会社
薬品発注システム
13日前
個人
文書処理プログラム及び情報処理装置
14日前
トヨタ自動車株式会社
文字抽出方法
28日前
株式会社日建設計
CO2排出量推定システム
18日前
株式会社誠勝
企業把握度を出力するフレームワーク
7日前
株式会社カネカ
生産計画立案システム
28日前
トヨタ自動車株式会社
文字列識別方法
28日前
株式会社野村総合研究所
NFT発行システム
7日前
トヨタ自動車株式会社
システム
11日前
トヨタ自動車株式会社
文字列識別方法
28日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ