TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024090282
公報種別
公開特許公報(A)
公開日
2024-07-04
出願番号
2022206071
出願日
2022-12-22
発明の名称
最適化方法
出願人
株式会社竹中工務店
代理人
弁理士法人太陽国際特許事務所
主分類
G06F
30/20 20200101AFI20240627BHJP(計算;計数)
要約
【課題】目標となる荷重変位関係を満たす構造物のトポロジーを得る。
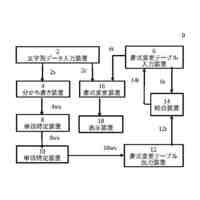
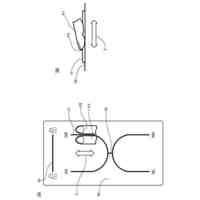
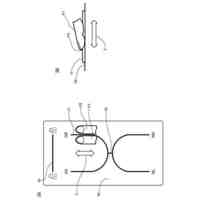
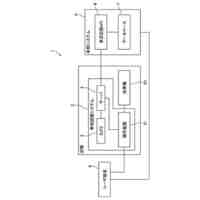
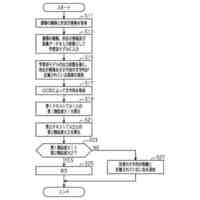
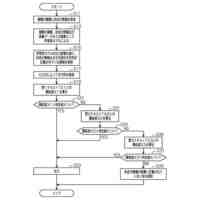
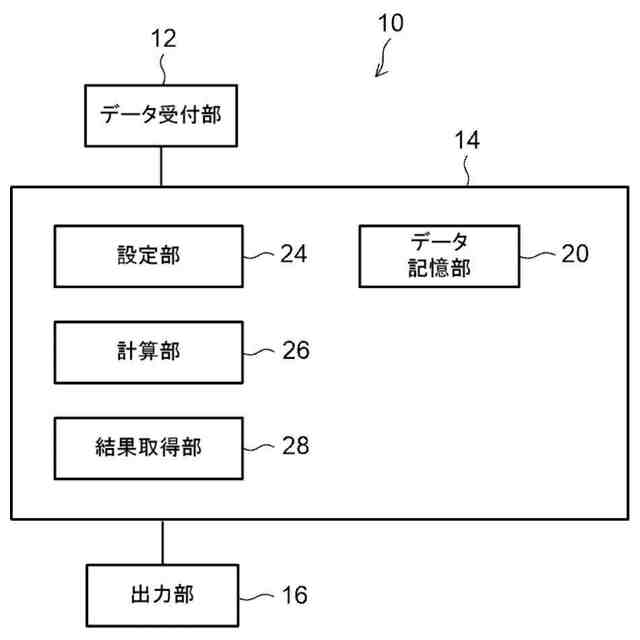
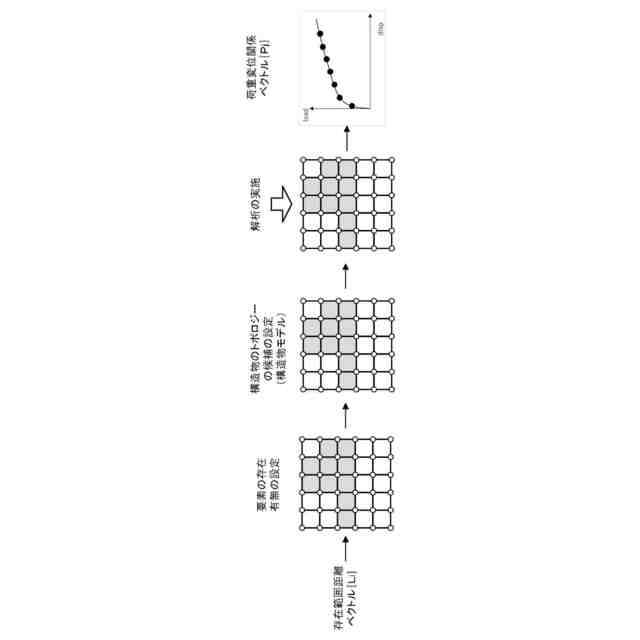
【解決手段】最適化装置10は、参照点との間の距離が表す範囲内に構造物の要素が存在していることを表す存在範囲距離ベクトルを設定する。最適化装置10は、存在範囲距離ベクトルの初期値又は更新された存在範囲距離ベクトルの各成分が表す距離に基づいて構造物のトポロジーの候補を決定する。最適化装置10は、構造物のトポロジーの候補に基づいて、構造解析シミュレーションを実行することにより、構造物のトポロジーの候補の荷重変位関係ベクトルを計算する。最適化装置10は、荷重変位関係ベクトルと目標荷重変位関係ベクトルとの間の誤差ベクトルを計算する。最適化装置10は、誤差ベクトルが小さくなるように、存在範囲距離ベクトルを更新する。最適化装置10は、構造物のトポロジーの候補の決定、誤差ベクトルの計算、及び新たな存在範囲距離ベクトルの計算を繰り返し、構造物のトポロジーを取得する。
【選択図】図1
特許請求の範囲
【請求項1】
目標となる荷重変位関係を満たす構造物のトポロジーを最適化する最適化方法であって、
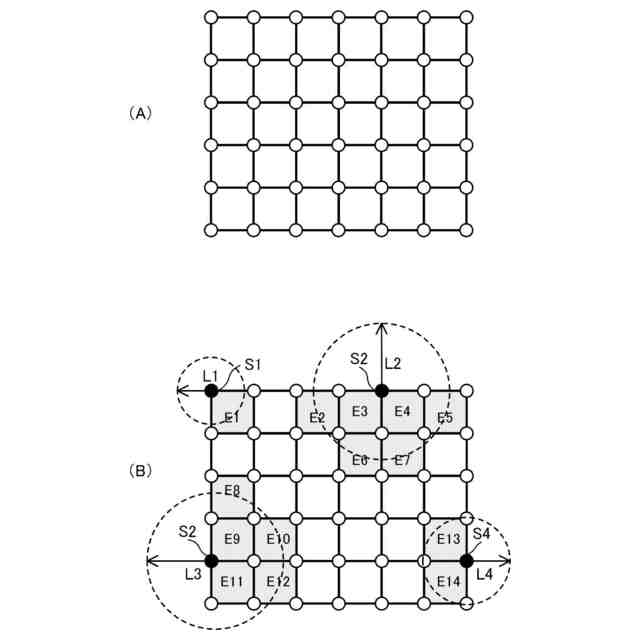
対象となる設計空間内において複数の参照点を設定し、
前記複数の参照点の各々との間の距離を表す変数を各成分として持ち、かつ前記参照点との間の距離が表す範囲内に前記構造物の要素が存在していることを表す存在範囲距離ベクトルの初期値を設定し、
前記存在範囲距離ベクトルの初期値又は更新された前記存在範囲距離ベクトルの各成分が表す前記距離に基づいて、前記構造物のトポロジーの候補を決定し、
前記構造物のトポロジーの候補に基づいて、所定の構造解析シミュレーションを実行することにより、前記構造物のトポロジーの候補の荷重変位関係を表すベクトルであって、かつ変位に対応する荷重を各成分として持つ荷重変位関係ベクトルを計算し、
前記荷重変位関係ベクトルと、目標となる荷重変位関係を表す目標荷重変位関係ベクトルとの間の誤差ベクトルを計算し、
前記誤差ベクトルが小さくなるように、前記存在範囲距離ベクトルを更新することにより、新たな前記存在範囲距離ベクトルを計算し、
前記構造物のトポロジーの候補の決定、前記誤差ベクトルの計算、及び新たな前記存在範囲距離ベクトルの計算を繰り返し、
所定の条件が満たされた場合に、前記存在範囲距離ベクトルの各成分が表す前記参照点からの前記距離の範囲内に前記構造物の要素が存在している前記構造物のトポロジーを取得する、
処理をコンピュータが実行する最適化方法。
続きを表示(約 450 文字)
【請求項2】
前記誤差ベクトルが小さくなるように新たな前記存在範囲距離ベクトルを更新する際に、
前記誤差ベクトルの前記存在範囲距離ベクトルに対する偏微分行列を生成し、
前記偏微分行列の特異値分解を実行することにより、特異値分解結果を生成し、
前記特異値分解結果のうちの部分行列から所定の低次モードに対応する部分行列を生成し、
生成された前記部分行列と前記誤差ベクトルとに基づいて、誤差縮小のための前記存在範囲距離ベクトルに対する第1修正ベクトルを生成し、
前記特異値分解結果のうちの部分行列から所定の高次モードに対応する部分行列を生成し、
生成された前記部分行列と前記存在範囲距離ベクトルとに基づいて、ノイズ除去のための前記存在範囲距離ベクトルに対する第2修正ベクトルを生成し、
前記存在範囲距離ベクトルと前記第1修正ベクトルと前記第2修正ベクトルとに基づいて、新たな前記存在範囲距離ベクトルを計算する、
請求項1に記載の最適化方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、最適化方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、材料ヤード縮減級数展開に基づく構造トポロジー最適化に関する方法が知られている(例えば、特許文献1を参照)。この方法は、従来の密度方法によるトポロジー最適化は設計変数が多すぎることによる、相対的密度や感度フィルタリング措置などが必要となることによる計算効率の低下の問題を解決する。
【0003】
また、構造設計のトポロジー進化最適化演算法が知られている(例えば、特許文献2を参照)。この方法は、公知の最適化構造設計に存在するメッシュ依頼性の問題を克服可能であり、しかも最適化された構造は平滑な幾何学境界を備えている。
【0004】
また、表面展開可能性制約を使用して、展開可能表面を有する構造を設計するための方法が知られている(例えば、特許文献3を参照)。
【0005】
また、トポロジー最適化技術として、均質化法に基づくトポロジー最適化(例えば、非特許文献1を参照。)、密度法に基づくトポロジー最適化(例えば、非特許文献2を参照。)、及びレベルセット法に基づくトポロジー最適化(例えば、非特許文献3を参照。)が知られている。
【0006】
また、荷重変位関係を目標とするダンパーの寸法最適化及びダンパーの形状最適化に関する技術が知られている(例えば、非特許文献4,5を参照。)。
【先行技術文献】
【特許文献】
【0007】
特表2021-516801号公報
特開2008-186440号公報
特開2021-125257号公報
【非特許文献】
【0008】
Bendsoe, Martin Philip, Kikuchi, Noboru Generating optimal topologies in structural design using a homogenization method, Computer Methods in Applied Mechanics and Engineering Open Access Volume 71, Issue 2, Pages 197 - 224November 1988
Bendsoe, Martin Philip: Optimal shape design as a material distribution problem; Structural Optimization, Vol.1, No.4, pp.193-202, 1989
J. A. Sethian, A. Wiegmann: Structural boundary design via level-set and immersed interface methods; Journal of Computational Physics, Vol.163, No.2, pp.489-528, 2000
稲葉澄,鈴木琢也,「ウェブ開口の導入によるせん断パネル型ダンパーの塑性変形性能の制御」,日本建築学会学術講演会梗概集,pp329-330,2021
鈴木琢也,「ウェブ面外不整形状の導入によるせん断パネル型ダンパーの力学特性の制御に関する解析的検討」,日本建築学会構造系論文集,Vol.84, No.765, pp.1401-1409, 2019.11
【発明の概要】
【発明が解決しようとする課題】
【0009】
構造物の形状を設計する際には、その構造物の性能を最大限に高めるような最適な形状を探索する必要がある。構造物の形状を探索する方法としては、上記特許文献1~3に開示されているようなトポロジー最適化が知られている。
【0010】
このトポロジー最適化は、部材の幅等を表す寸法自体を設計変数とする「寸法最適化」又は部材の外形線を設計変数とする「形状最適化」とは異なり、設計対象とする空間における要素の分布を設計変数とする自由度の高い最適化手法である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
環境情報処理装置
17日前
個人
外食予約システム
17日前
個人
電子文書の閲覧用電子機器
3日前
ニデック株式会社
冷却装置
11日前
個人
海外在住支援システム
17日前
個人
サービス提供システム
10日前
個人
施術スタッフ育成システム
4日前
株式会社ワコム
電子ペン
20日前
東洋電装株式会社
操作装置
20日前
東洋電装株式会社
操作装置
20日前
東洋電装株式会社
操作装置
20日前
株式会社SUBARU
操作制御装置
10日前
学校法人修道学園
農地集約システム
10日前
株式会社カロニマ
情報発信システム
24日前
株式会社SUBARU
画像処理装置
4日前
旭精工株式会社
管理装置および管理システム
10日前
ローム株式会社
電源制御集積回路
17日前
シーアンドアールエム株式会社
広告装置
27日前
株式会社デンソー
表示装置
6日前
株式会社京南
洗車システム
3日前
株式会社京南
洗車システム
3日前
富士フイルム株式会社
タッチセンサ
27日前
個人
取引システム、取引方法及び取引プログラム
18日前
株式会社and.d
商品の推奨方法
19日前
株式会社豊田自動織機
物体検出装置
17日前
個人
文書処理プログラム及び情報処理装置
13日前
トヨタ自動車株式会社
文字抽出方法
27日前
三浦工業株式会社
薬品発注システム
12日前
株式会社誠勝
企業把握度を出力するフレームワーク
6日前
株式会社野村総合研究所
NFT発行システム
6日前
株式会社日建設計
CO2排出量推定システム
17日前
株式会社カネカ
生産計画立案システム
27日前
トヨタ自動車株式会社
システム
10日前
トヨタ自動車株式会社
文字列識別方法
27日前
トヨタ自動車株式会社
文字列識別方法
27日前
日本電気株式会社
量子コンピュータ装置
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ