TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024084012
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022198163
出願日
2022-12-12
発明の名称
ロボットシステム
出願人
オムロン株式会社
,
中外製薬株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
13/08 20060101AFI20240617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】粉体、粒体、又は粘性体である物質の元容器から移し先容器への薬さじを用いた量り取りを自動化し、移し先容器へ移された物質の重量を、化学実験や生体試料を扱う実験の場面にも利用できる精度で取得する。
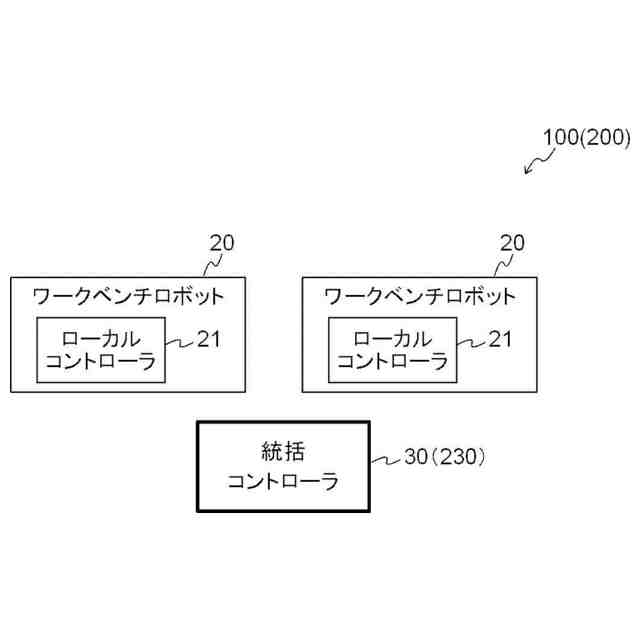
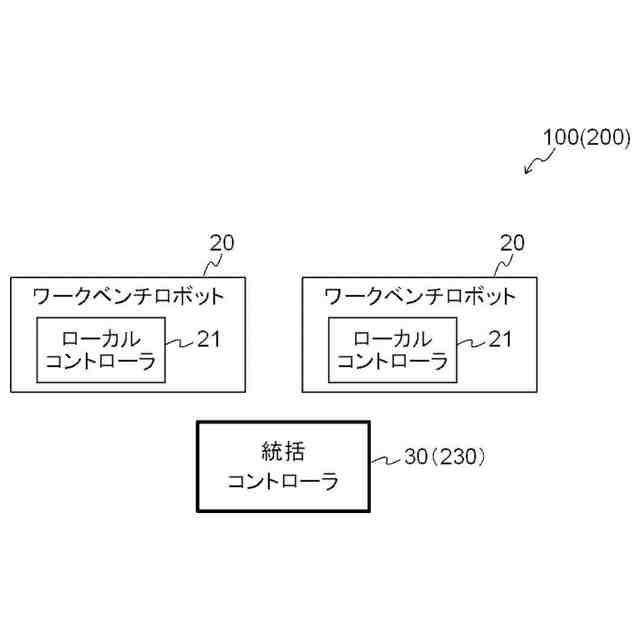
【解決手段】ワークベンチに対して固定されており、ワークベンチ上の物体を把持するための機構を備えたワークベンチロボット20と、ワークベンチロボット20の動作を制御する統括コントローラ30とを含むロボットシステム100であって、統括コントローラ30は、ワークベンチロボット20に、薬さじを把持させ、元容器に入っている量り取り対象の粉体、粒体、又は粘性体の物質を移し先容器に薬さじを用いてすくい移す動作をさせ、移し先容器内の物質の重量を秤を用いて計測させ、計測結果を取得する、量り取り処理を行う。
【選択図】図1
特許請求の範囲
【請求項1】
ワークベンチに対して固定されており、前記ワークベンチ上の物体を把持するための機構を備えたワークベンチロボットと、前記ワークベンチロボットの動作を制御するコントローラとを含むロボットシステムであって、
前記コントローラは、前記ワークベンチロボットに、薬さじを把持させ、元容器に入っている量り取り対象の粉体、粒体、又は粘性体の物質を移し先容器に前記薬さじを用いてすくい移す動作をさせ、前記移し先容器内の前記物質の重量を秤を用いて計測させ、計測結果を取得する、量り取り処理を行う、
ロボットシステム。
続きを表示(約 1,700 文字)
【請求項2】
前記コントローラは、さらに、前記移し先容器内の前記物質の重量の目標値及び許容範囲を取得する処理を行い、
前記量り取り処理は、前記コントローラが、1回又は複数回の前記すくい移す動作をさせた後に取得した前記計測結果が前記許容範囲を超えて前記目標値よりも小さい場合に、前記ワークベンチロボットに、追加の前記すくい移す動作をさせることを含む、
請求項1に記載のロボットシステム。
【請求項3】
前記量り取り処理は、前記コントローラが、1回又は複数回の前記すくい移す動作をさせた後に取得した前記計測結果が前記許容範囲を超えて前記目標値よりも大きい場合に、前記ワークベンチロボットに、前記移し先容器内の前記物質を前記元容器に前記薬さじを用いてすくい移す動作をさせることを含む、請求項2に記載のロボットシステム。
【請求項4】
前記コントローラは、前記計測結果と前記目標値との差異の大きさ、又は移し先容器内の前記物質の重量の推定値と前記目標値との差異の大きさに応じて、前記差異が小さいほど小さな薬さじを用いてすくい移す動作をさせるように、前記ワークベンチロボットに大きさの異なる複数の種類の薬さじを持ち替えさせる処理をさらに行う、請求項2又は請求項3に記載のロボットシステム。
【請求項5】
前記コントローラは、前記ワークベンチロボットに、前記移し先容器が前記秤に載置されていない状態で前記すくい移す動作をさせ、前記計測をさせるために前記移し先容器を前記秤に載置させる、請求項1~請求項3のいずれか1項に記載のロボットシステム。
【請求項6】
前記コントローラは、前記ワークベンチロボットに、前記移し先容器を前記秤ではない他の秤に載置させた状態で前記すくい移す動作をさせ、前記移し先容器内の前記物質の重量を前記他の秤を用いて計測させ、前記他の秤による計測結果を取得し、前記他の秤による計測結果が、前記移し先容器内の前記物質の重量の目標値を含む所定の範囲内になった場合に前記移し先容器を前記秤に載置させて前記移し先容器内の前記物質の重量を計測させる、請求項5に記載のロボットシステム。
【請求項7】
前記ワークベンチロボットは、前記機構として第1マニピュレータ及び第2マニピュレータを備え、
前記コントローラは、前記ワークベンチロボットに前記すくい移す動作をさせる際に、前記第1マニピュレータに前記元容器を把持させて前記元容器を傾いた姿勢にし、前記第2マニピュレータに前記薬さじを把持させる、
請求項1又は請求項2に記載のロボットシステム。
【請求項8】
前記コントローラは、さらに、前記ワークベンチロボットに、前記量り取り処理の後の前記移し先容器に溶媒液を注入させることにより前記移し先容器内の前記物質を溶液化する処理を行う、請求項1~請求項3のいずれか1項に記載のロボットシステム。
【請求項9】
前記コントローラは、溶液の目標濃度を取得する処理と、前記計測結果に基づいて、溶液を前記目標濃度にするために必要な溶媒量を特定する処理と、前記ワークベンチロボットに、前記溶媒量の溶媒液を前記移し先容器にピペットを用いて注入させる処理とを行う、請求項8に記載のロボットシステム。
【請求項10】
前記元容器として、同種の前記物質が入っている第1元容器及び第2元容器が用意されている場合において、
前記コントローラは、前記第1元容器内の前記物質の残量が少ないために前記第1元容器から前記移し先容器へすくい移す動作だけでは前記移し先容器内の物質の重量を前記許容範囲内に到達させることができない場合に、前記ワークベンチロボットに、前記第1元容器から前記移し先容器へすくい移す動作の後に前記第2元容器から前記移し先容器へすくい移す動作をさせる、
請求項2又は請求項3に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
化学実験や生体試料を扱う実験においては、研究員の手によって、粉体、粒体、又は粘性体である薬品のような物質を元容器から移し先容器へ薬さじを用いてすくい移す作業を含む量り取りが行われることがある。特許文献1には、粉体、粒体、液体、又は粘性体である対象物を容器から採取し、別の容器に移し替えるロボットが記載されている。
【先行技術文献】
【特許文献】
【0003】
特許公報第6978023号
【発明の概要】
【発明が解決しようとする課題】
【0004】
化学実験や生体試料を扱う実験の全般について機械を利用した自動化が望まれており、上記の量り取りについても自動化できることが好ましい。化学実験や生体試料を扱う実験の分野では、量り取りされた物質の正確な重量が必要であることが多い。また、量り取りの目標重量とすくい移しされた実際の重量との差をなるべく小さくできることが好ましく、そうできる前提としてもすくい移しされた物質の重量の誤差の少ない値を取得できることは重要である。
【0005】
特許文献1に記載のロボットでは、ロボットの採取部による1回の採取量を目標値に近づけるべく、採取量の超過分を採取部から落下させる動作を行う。この方法では、実際の採取量を高精度に推定すること及び落下させる量を高精度に制御することは困難である。そのため、料理に用いる調味料の量り取りの場面などでは実用に足るとしても、例えばミリグラムよりも小さいオーダーの重量精度が問題になるような化学実験や生体試料を扱う実験における量り取りの場面に適用することは難しい。
【0006】
本発明は、粉体、粒体、又は粘性体である物質の元容器から移し先容器への薬さじを用いた量り取りを自動化し、移し先容器へ移された物質の重量を、化学実験や生体試料を扱う実験の場面にも利用できる精度で取得できるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係るロボットシステムは、ワークベンチに対して固定されており、前記ワークベンチ上の物体を把持するための機構を備えたワークベンチロボットと、前記ワークベンチロボットの動作を制御するコントローラとを含むロボットシステムであって、前記コントローラは、前記ワークベンチロボットに、薬さじを把持させ、元容器に入っている量り取り対象の粉体、粒体、又は粘性体の物質を移し先容器に前記薬さじを用いてすくい移す動作をさせ、前記移し先容器内の前記物質の重量を秤を用いて計測させ、計測結果を取得する、量り取り処理を行う。
【発明の効果】
【0008】
本発明に係るロボットシステムによれば、粉体、粒体、又は粘性体である物質の元容器から移し先容器への薬さじを用いた量り取りを自動化し、移し先容器へ移された物質の重量を、化学実験や生体試料を扱う実験の場面にも利用できる精度で取得できる。
【図面の簡単な説明】
【0009】
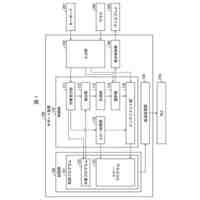
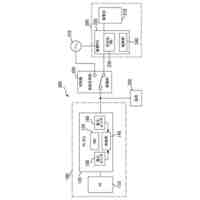
第1及び第2実施形態に係るロボットシステムの概略構成を示すブロック図である。
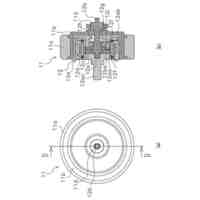
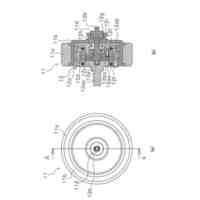
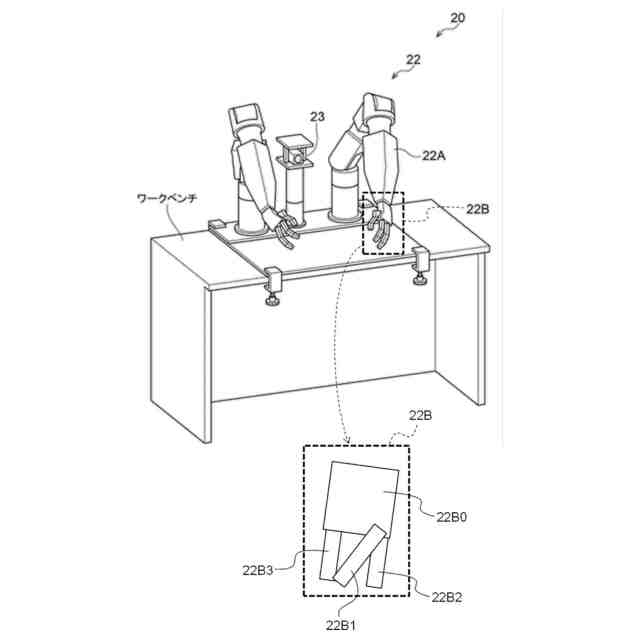
ワークベンチロボットの外観斜視図である。
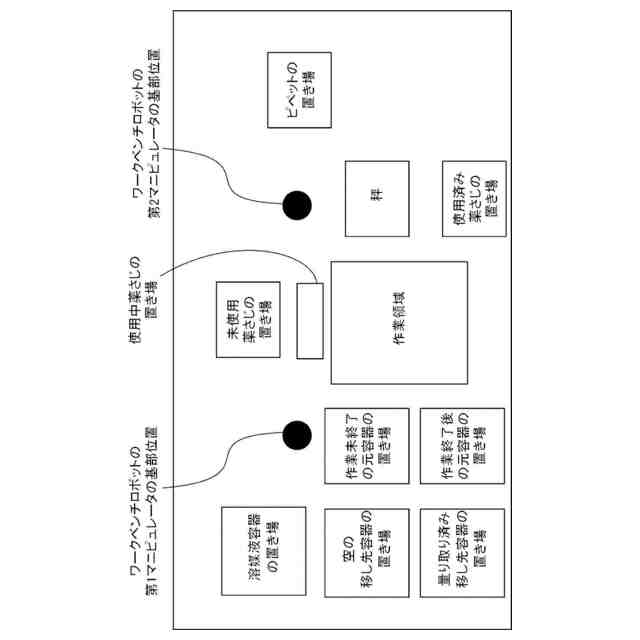
ワークベンチ上の実験器具等の配置の一例を示す概略平面図である。
元容器の一例を示す図である。
移し先容器の一例を示す図である。
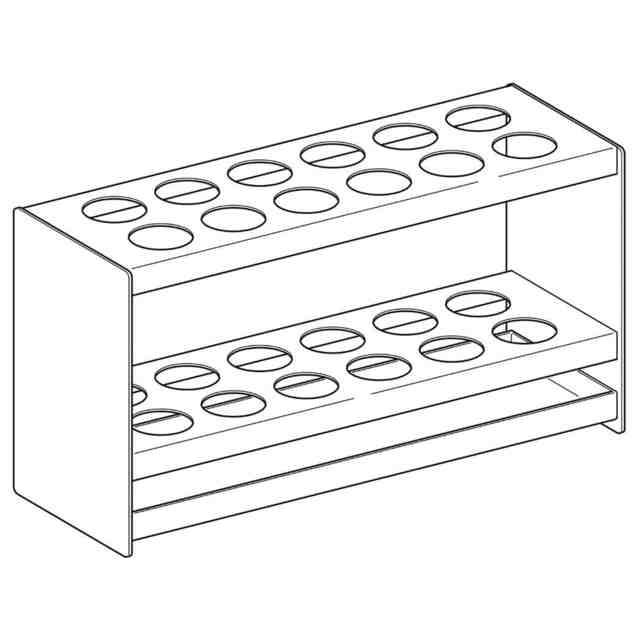
容器ラックの一例を示す図である。
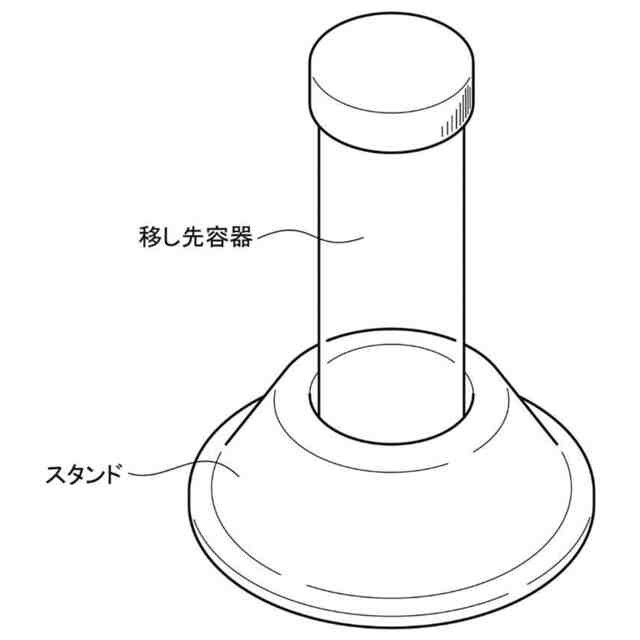
移し先容器をスタンドに立てた状態を示す図である。
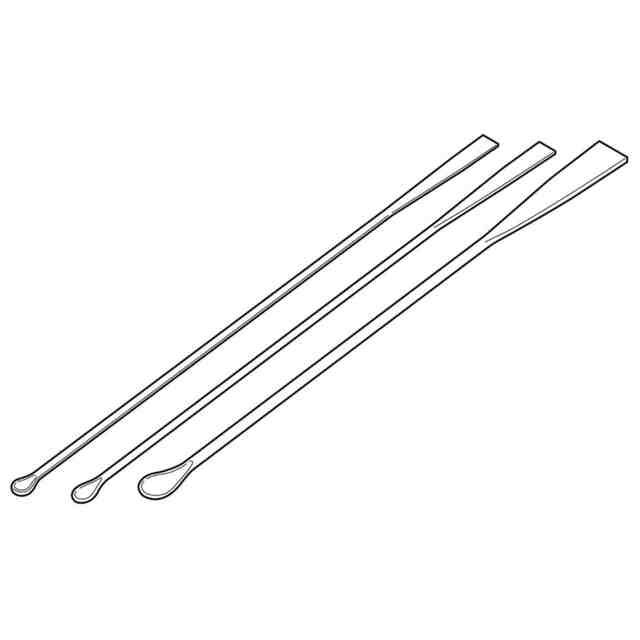
薬さじの一例を示す図である。
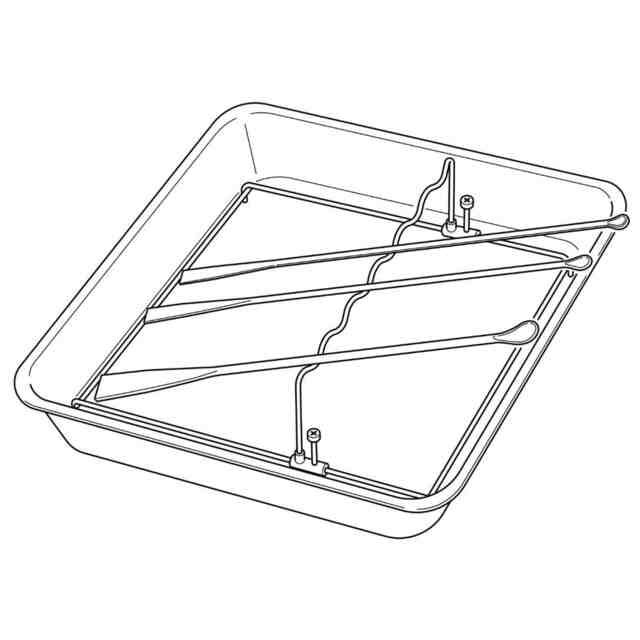
薬さじラックの一例を示す図である。
秤の一例を示す図である。
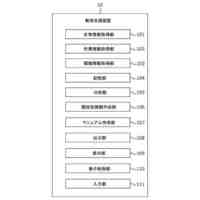
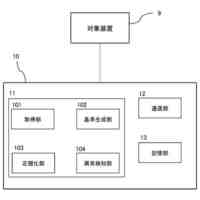
統括コントローラのハードウェア構成を示すブロック図である。
第1実施形態における制御処理の流れを示すフローチャートである。
すくい移しを説明するための図である。
すくい移しを説明するための図である。
薬さじの把持方法の他の例を説明するための図である。
第2実施形態における制御処理の流れを示すフローチャートである。
移し先容器への溶媒液の注入を説明するための図である。
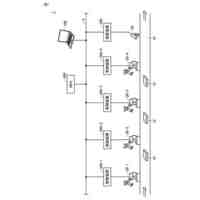
第3実施形態に係るロボットシステムが稼働する実験環境の一例を示す概略平面図である。
第3~第5実施形態に係るロボットシステムの概略構成を示すブロック図である。
モバイルマニピュレータの外観斜視図である。
第3実施形態における制御処理の流れを示すフローチャートである。
第3実施形態における制御処理の流れの他の例を示すフローチャートである。
第4実施形態における制御処理の流れを示すフローチャートである。
第4実施形態における制御処理の流れの他の例を示すフローチャートである。
第4実施形態における制御処理の流れの他の例を示すフローチャートである。
第5実施形態における制御処理の流れを示すフローチャートである。
第5実施形態における制御処理の流れの他の例を示すフローチャートである。
第5実施形態における制御処理の流れの他の例を示すフローチャートである。
第5実施形態における制御処理の流れの他の例を示すフローチャートである。
コントローラの構成の他の例を説明するための図である。
コントローラの構成の他の例を説明するための図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態の一例を、図面を参照しつつ説明する。なお、各図面において同一又は等価な構成要素及び部分には同一の参照符号を付与している。また、図面の寸法及び比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
基板
21日前
オムロン株式会社
計測装置
25日前
オムロン株式会社
電磁石装置
1日前
オムロン株式会社
電磁継電器
10日前
オムロン株式会社
電磁継電器
10日前
オムロン株式会社
電磁石装置
1日前
オムロン株式会社
サーボシステム
22日前
オムロン株式会社
ロボットシステム
4日前
オムロン株式会社
スイッチング装置
28日前
オムロン株式会社
椅子支持装置及び椅子
22日前
オムロン株式会社
椅子支持装置及び椅子
22日前
オムロン株式会社
導光板および表示装置
11日前
オムロン株式会社
操作装置及び調整システム
18日前
オムロン株式会社
異物検知装置及びコイル装置
1か月前
オムロン株式会社
距離測定装置及び、距離測定方法
22日前
オムロン株式会社
制御システムおよび情報処理方法
29日前
オムロン株式会社
サポート装置およびサポート方法
17日前
オムロン株式会社
ロボットシステムおよびコントローラ
4日前
オムロン株式会社
因子分析装置、方法、及びプログラム
15日前
オムロン株式会社
電力変換装置及び直流電力供給システム
1か月前
オムロン株式会社
作業時間推測装置、方法およびプログラム
18日前
オムロン株式会社
モデル因子決定装置、方法、及びプログラム
15日前
オムロン株式会社
ホイールユニットおよびこれを備えたマウス
10日前
オムロン株式会社
栽培支援装置、栽培支援方法及びプログラム
1日前
オムロン株式会社
電源システム及び蓄電パワーコンディショナ
1か月前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
10日前
オムロン株式会社
画像データの管理方法、プログラム及びX線検査装置
1か月前
オムロン株式会社
通信装置、通信システム、通信方法、通信プログラム
4日前
オムロン株式会社
シミュレーションシステムおよびシミュレーション方法
4日前
オムロン株式会社
シミュレーションシステムおよびシミュレーション方法
2日前
オムロン株式会社
シミュレーションシステムおよびシミュレーション方法
2日前
オムロン株式会社
自律作業システム及び自律作業機を制御するための方法
23日前
オムロン株式会社
情報提供装置、情報提供方法および情報提供プログラム
18日前
オムロン株式会社
開発支援装置、開発支援方法および開発支援プログラム
3日前
オムロン株式会社
施設管理システム、施設管理方法、及び施設管理プログラム
17日前
オムロン株式会社
異常検知装置、異常検知システム、異常検知方法及びプログラム
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ