TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024083823
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022197865
出願日
2022-12-12
発明の名称
シミュレーションシステムおよびシミュレーション方法
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
13/08 20060101AFI20240617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】3Dシミュレーションを用いて作成したティーチングデータを実空間の製造ラインの土台等の歪みに応じて修正する。
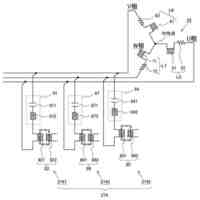
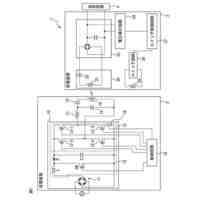
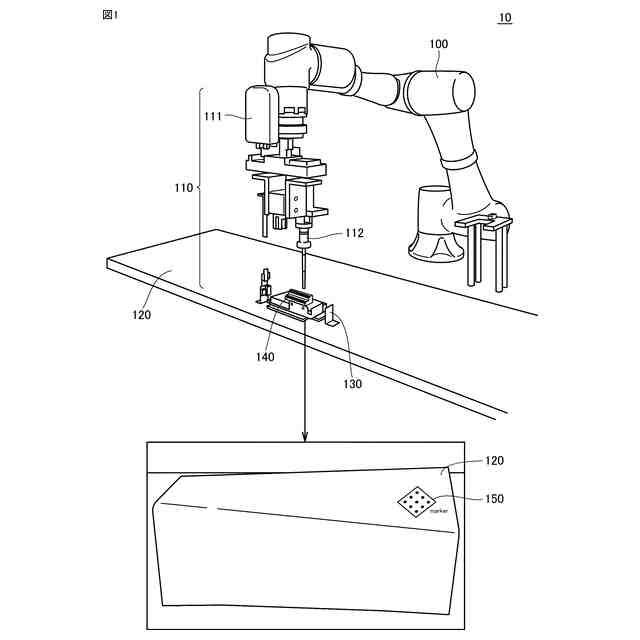
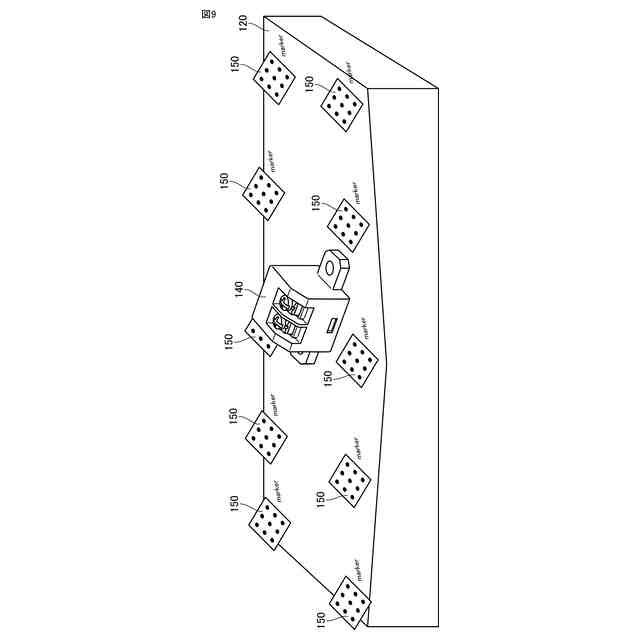
【解決手段】シミュレーションシステムは、多関節ロボット100に取り付けられたカメラ111と、シミュレーション装置とを備える。カメラ111は、実世界の製造ライン10の土台120に配置されたランドマーク150の画像をシミュレーション装置に送信する。シミュレーション装置は、画像内のランドマーク150上に均等に配置された複数のマーカーを解析し、カメラ111から見た複数のマーカーの各々の形状および配置間隔に基づいて、土台120の歪みを推定し、推定の結果に基づいて、3D(Dimensional)空間で再現された製造ライン10において、土台120の歪みを再現し、3D空間において、歪んだ土台120上のワーク140に対する多関節ロボットの加工処理におけるティーチングデータを修正し、ティーチングデータの修正結果を、多関節ロボットの制御装置にフィードバックする。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットに取り付けられたカメラと、
シミュレーション装置とを備え、
前記カメラは、実世界の製造ラインの土台に配置されたランドマークの画像を前記シミュレーション装置に送信し、
前記シミュレーション装置は、
前記画像内の前記ランドマーク上に均等に配置された複数のマーカーを解析し、
前記カメラから見た前記複数のマーカーの各々の形状および配置間隔に基づいて、前記土台の歪みを推定し、
前記推定の結果に基づいて、3D(Dimensional)空間で再現された前記製造ラインにおいて、前記土台の歪みを再現し、
前記3D空間において、歪んだ前記土台上のワークに対する多関節ロボットの加工処理におけるティーチングデータを修正し、
前記ティーチングデータの修正結果を、前記多関節ロボットの制御装置にフィードバックする、シミュレーションシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記ティーチングデータを修正することは、前記多関節ロボットに備え付けられた電動工具のトルクを調整することを含む、請求項1に記載のシミュレーションシステム。
【請求項3】
前記ティーチングデータを修正することは、前記多関節ロボットが嵌合動作において前記ワークにかける力を調整することを含む、請求項1に記載のシミュレーションシステム。
【請求項4】
前記土台の歪みを再現することは、前記土台の歪みに基づいて、前記土台上の前記ワークの歪みを再現することを含む、請求項1~3のいずれかに記載のシミュレーションシステム。
【請求項5】
前記シミュレーション装置は、
前記ワークの材質情報をストレージから読み出し、
前記ワークの歪み量と前記ワークの前記材質情報とから、前記ティーチングデータの修正量を算出する、請求項4に記載のシミュレーションシステム。
【請求項6】
前記ティーチングデータの修正量を算出することは、
有限要素法を用いて、前記ワークの歪んでいる部分の応力を算出することと、
前記応力に基づいて、前記ティーチングデータの修正量を算出することとを含む、請求項5に記載のシミュレーションシステム。
【請求項7】
前記ランドマークは、前記土台に分散配置された複数のランドマークを含み、
前記土台の歪みを推定することは、前記複数のランドマークの各々から、前記土台の各部分の歪みを推定することを含む、請求項1~3のいずれかに記載のシミュレーションシステム。
【請求項8】
多関節ロボットに取り付けられたカメラにより、実世界の製造ラインの土台に配置されたランドマークの画像を撮影するステップと、
前記画像をシミュレーション装置に送信するステップと、
前記画像内の前記ランドマーク上に均等に配置された複数のマーカーを解析するステップと、
前記カメラから見た前記複数のマーカーの各々の形状および配置間隔に基づいて、前記土台の歪みを推定するステップと、
前記推定の結果に基づいて、3D空間で再現された前記製造ラインにおいて、前記土台の歪みを再現するステップと、
前記3D空間において、歪んだ前記土台上のワークに対する多関節ロボットの加工処理におけるティーチングデータを修正するステップと、
前記ティーチングデータの修正結果を、前記多関節ロボットの制御装置にフィードバックするステップとを備える、シミュレーション方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーションシステムに関し、より特定的には、ロボットのティーチングデータの修正技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、産業用のロボットのティーチングのために、3D(Dimensional)シミュレーション技術が使用されている。3Dシミュレーションによるティーチングは、実際の製造ライン等を用意して動作させる必要がない。そのため、ユーザは、3Dシミュレータを使用することで、容易にかつ安価にロボットのティーチング処理を行うことができる。
【0003】
しかしながら、3Dシミュレーション上の物体の位置および姿勢は理想的な値である。これらの値は、必ずしも実空間における物体の位置および姿勢とは一致しない。そのため、ユーザは、実際の製造ラインを動作させることで、ロボットを再ティーチングしなければならない。特に、コネクタの嵌合作業、ネジ締め作業等の動作をロボットに行わせる場合、ユーザは、ロボットの実機を用いたティーチングを何度も繰り返す必要があった。そこで、より容易にかつ迅速に再ティーチングを完了させるための技術が望まれている。なお、物体の位置を検出してロボットを制御するために、何らかのマークを使用する技術が知られている。
【0004】
マークを使用したロボット制御に関し、例えば、特開2017-083234号公報(特許文献1)は、「サーチ用マークを用いて、計測対象の表面にラインレーザにより形成された光切断線が形成されている部分の座標を算出するマークサーチ部を備える」三次元形状計測装置を開示している([要約]参照)。
【先行技術文献】
【特許文献】
【0005】
特開2017-083234号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示された技術によると、実空間のワークの形状を検出することはできるかもしれない。しかしながら、特許文献1に開示された技術は、3Dシミュレーションを用いて作成したティーチングデータを実空間の製造ラインの土台等の歪みに応じて修正することができない。したがって、3Dシミュレーションを用いて作成したティーチングデータを実空間の製造ラインの土台等の歪みに応じて修正する技術が必要とされている。
【0007】
本開示は、上記のような背景に鑑みてなされたものであって、ある局面における目的は、3Dシミュレーションを用いて作成したティーチングデータを実空間の製造ラインの土台等の歪みに応じて修正する技術を提供することにある。
【課題を解決するための手段】
【0008】
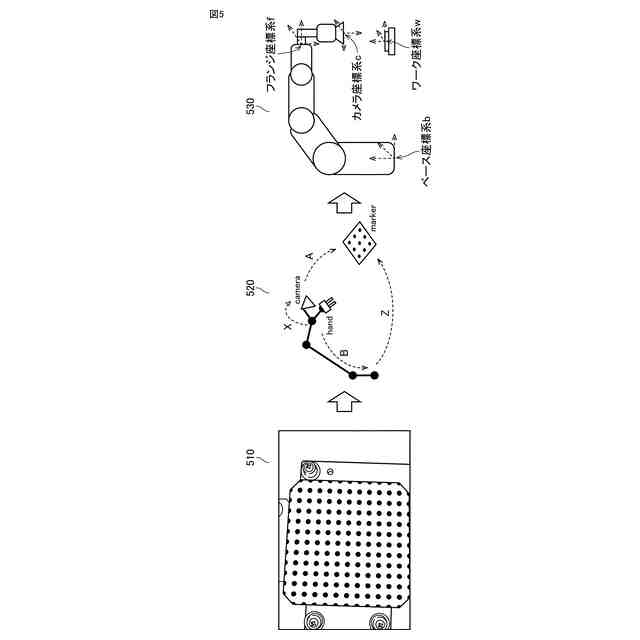
ある実施の形態に従うと、シミュレーションシステムは、多関節ロボットに取り付けられたカメラと、シミュレーション装置とを備える。カメラは、実世界の製造ラインの土台に配置されたランドマークの画像をシミュレーション装置に送信する。シミュレーション装置は、画像内のランドマーク上に均等に配置された複数のマーカーを解析し、カメラから見た複数のマーカーの各々の形状および配置間隔に基づいて、土台の歪みを推定し、推定の結果に基づいて、3D(Dimensional)空間で再現された製造ラインにおいて、土台の歪みを再現し、3D空間において、歪んだ土台上のワークに対する多関節ロボットの加工処理におけるティーチングデータを修正し、ティーチングデータの修正結果を、多関節ロボットの制御装置にフィードバックする。この開示によれば、シミュレーションシステムは、3D空間の製造ラインと、実世界の製造ラインとのずれに基づいて、多関節ロボットのティーチングデータを修正して、当該修正結果を制御装置にフィードバックし得る。
【0009】
上記の開示において、ティーチングデータを修正することは、多関節ロボットに備え付けられた電動工具のトルクを調整することを含む。この開示によれば、シミュレーションシステムは、3D空間の製造ラインと、実世界の製造ラインとのずれに基づいて、電動工具のトルクを調整し得る。
【0010】
上記の開示において、ティーチングデータを修正することは、多関節ロボットが嵌合動作においてワークにかける力を調整することを含む。この開示によれば、シミュレーションシステムは、3D空間の製造ラインと、実世界の製造ラインとのずれに基づいて、多関節ロボットが嵌合動作においてワークにかける力を調整し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
端子台
17日前
オムロン株式会社
モータ
9日前
オムロン株式会社
スイッチ
2日前
オムロン株式会社
ソケット
17日前
オムロン株式会社
電気機器
17日前
オムロン株式会社
電気機器
10日前
オムロン株式会社
スイッチ
2日前
オムロン株式会社
検査装置
1か月前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電子機器
1か月前
オムロン株式会社
電磁継電器
2日前
オムロン株式会社
センサ装置
1か月前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電力変換装置
9日前
オムロン株式会社
電力変換装置
9日前
オムロン株式会社
電動把持工具
16日前
オムロン株式会社
コントローラ
2日前
オムロン株式会社
フィルタ装置
2日前
オムロン株式会社
充放電システム
10日前
オムロン株式会社
トリガスイッチ
16日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
非接触給電装置
9日前
オムロン株式会社
電子機器システム
5日前
オムロン株式会社
自律作業システム
1か月前
オムロン株式会社
生体情報処理方法
1か月前
オムロン株式会社
リミットスイッチ
5日前
オムロン株式会社
経路情報提供システム
26日前
オムロン株式会社
検出装置および操作装置
1か月前
オムロン株式会社
測定システム及び測定方法
5日前
オムロン株式会社
運用支援方法及びシステム
5日前
オムロン株式会社
検査装置及び対象物検知方法
5日前
オムロン株式会社
装置、温調システムおよび方法
1か月前
オムロン株式会社
X線検査装置及びX線検査方法
16日前
オムロン株式会社
X線検査装置及びその制御方法
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ