TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024040878
公報種別
公開特許公報(A)
公開日
2024-03-26
出願番号
2022145518
出願日
2022-09-13
発明の名称
無人航空機及びそのフロート
出願人
KDDI株式会社
代理人
個人
,
個人
主分類
B64C
35/00 20060101AFI20240318BHJP(航空機;飛行;宇宙工学)
要約
【課題】着水及び離水自在に自律飛行する無人航空機の限られたスペースに複数のハイドロフォンを分散配置できるようにしてSBLによる音響測位を実現する無人航空機及びそのフロートを提供する。
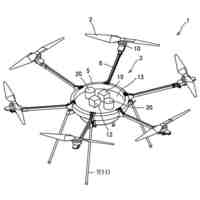
【解決手段】水空合体ドローン1の胴体部分から放射状に延びた6本のアーム11の下部には、着水時に水面下に沈んで水空合体ドローン1に浮力を生じさせて水面に留まらせるためのフロート部14が連結具16を介してそれぞれ設けられている。フロート部14は円柱状の本体部14a及びその下方に延設されたキャップ上ないしは円錐状の突起部14bから構成され、突起部14bの内部にはハイドロフォン20が実装されている。ハイドロフォン20は、その端部に装着された感圧素子20aが空合体ドローン1/空中ドローン1Aの着水時に水中の音波を検知できる位置、姿勢で固定されている。
【選択図】図3
特許請求の範囲
【請求項1】
着水及び離水自在に自律飛行する無人航空機において、
着水時の航空機に浮力を生じさせる少なくとも3つのフロート部が水平方向に分散して装備され、
各フロート部内にハイドロフォンが、その感圧部が着水時に水中の音波に対して露出するようにそれぞれ実装されたことを特徴とする無人航空機。
続きを表示(約 700 文字)
【請求項2】
前記無人航空機が水空合体ドローンであり、前記少なくとも3つのフロート部が空中ドローンに装備されたことを特徴とする請求項1に記載の無人航空機。
【請求項3】
ハイドロフォンが実装されたフロート部が少なくとも4か所に装備され、少なくとも4個のハイドロフォンの少なくとも3個を選択的に稼働させる手段を具備したことを特徴とする請求項1に記載の無人航空機。
【請求項4】
前記無人航空機の胴体部と各フロート部との相対位置が遠隔操作により可変であることを特徴とする請求項1に記載の無人航空機。
【請求項5】
前記各フロート部が航空機の胴体部から放射状に延設されたアーム部の下方に設けられ、
前記アーム部が遠隔操作により伸張自在であることを特徴とする請求項4に記載の無人航空機。
【請求項6】
前記各フロート部が航空機の胴体部から放射状に延設されたアーム部の下方に連結具を介して設けられ、
前記連結具が遠隔操作により鉛直方向に伸張自在であることを特徴とする請求項4に記載の無人航空機。
【請求項7】
前記少なくとも3個のハイドロフォンが検知した音響信号に基づいてSBL方式の測位を行うことを特徴とする請求項1ないし6のいずれかに記載の無人航空機。
【請求項8】
着水する無人航空機に対して浮力を生じさせる無人航空機用のフロートにおいて、
フロート部内にハイドロフォンが、その感圧部が着水時に水中の音波に対して露出するように実装されたことを特徴とする無人航空機用フロート。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律飛行可能な無人航空機及びそのフロートに係り、特に、着水及び離水自在に自律飛行する無人航空機及びそのフロートに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
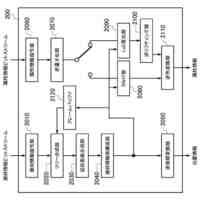
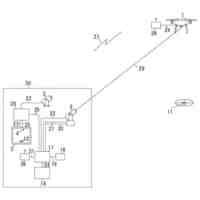
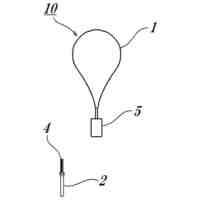
特許文献1及び非特許文献1には、図7に示すように、空中ドローンが水中ドローンを抱えて飛行し、目的水域に着水後、水中ドローンを分離・潜航させ、作業終了後に回収・離水する「水空合体ドローン」が開示されている。
【0003】
水中ドローンは目的水域に潜航後、装着した発信器から音波を発信し、空中ドローン側の水中マイク(ハイドロフォン)で受信、それを自動解析して、水中ドローンの位置を算出する「音響測位」の技術を搭載している。
【0004】
算出された位置情報は、図8に示すように、空中ドローンのカメラ映像[同図(a)]や水中ドローンのカメラ映像[同図(b)]等と共に陸上の拠点に送られ、地図上に位置が表示される。非特許文献2には音響測位技術が開示されている。
【0005】
従来の水空合体ドローンの音響測位技術にはSSBL(Super Short Base Line)方式が採用されており、茶筒状の容器に3個以上のハイドロフォンをまとめて収容し、各ハイドロフォンが受信した音響信号の時間差を求めて発信元の位置を計算する。
【0006】
これとは別にSBL(Short Base Line)という音響測位方式が非特許文献2に開示されており、SBLでは3個以上のハイドロフォンを離間配置する必要があるもののSSBLよりも精度の高い測位が可能になる。
【先行技術文献】
【特許文献】
【0007】
特開2021-174214号公報
【非特許文献】
【0008】
KDDI/KDDI総合研究所/プロドローン、ニュースリリース「世界初の水空合体ドローン、遠隔での水中撮影に成功~船を出さずに洋上風力発電設備の安全・効率的な点検を実施~」、2021年12月14日https://news.kddi.com/kddi/corporate/newsrelease/2021/12/14/5593.html
海洋音響学会「海洋音響の基礎と応用」、成山堂書店、P.236-245
【発明の概要】
【発明が解決しようとする課題】
【0009】
着水及び離水可能に設計される空中ドローン、特に水空合体ドローンには、複数のハイドロフォンをある程度の距離を保って分散配置するだけのスペースを確保することが難しかった。そのため、複数のハイドロフォンを1か所にまとめて配置できるSSBL方式を採用せざるを得なかった。
【0010】
本発明の目的は、上記の技術課題を解決し、着水及び離水自在に自律飛行する無人航空機の限られたスペースに複数のハイドロフォンを分散配置できるようにしてSBLによる音響測位を実現する無人航空機及びそのフロートを提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
KDDI株式会社
制御装置、方法及びプログラム
1か月前
KDDI株式会社
制御装置、方法及びプログラム
1か月前
KDDI株式会社
情報処理装置及び情報処理方法
今日
KDDI株式会社
光ニューラルネットワーク装置
1か月前
KDDI株式会社
無線周波数信号で光を変調する通信装置
5日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
20日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
20日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
20日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
20日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
20日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
20日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
20日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
20日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
13日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1日前
KDDI株式会社
コンテンツ提供システム、コンテンツ提供装置及び携帯端末
1か月前
KDDI株式会社
文の知識誤りを検出する知識判定装置、プログラム及び方法
13日前
KDDI株式会社
基地局、端末装置、プログラム、通信方法及びデータ生成方法
1か月前
KDDI株式会社
サーバシステム
1か月前
トヨタ自動車株式会社
情報処理装置、情報処理方法、プログラム
6日前
KDDI株式会社
評価対象の危険性を推定するプログラム、装置、システム及び方法
今日
KDDI株式会社
メッシュ復号装置、メッシュ符号化装置、メッシュ復号方法及びプログラム
20日前
KDDI株式会社
メッシュ復号装置、メッシュ符号化装置、メッシュ復号方法及びプログラム
20日前
KDDI株式会社
メッシュ復号装置、メッシュ符号化装置、メッシュ復号方法及びプログラム
20日前
KDDI株式会社
メッシュ復号装置、メッシュ符号化装置、メッシュ復号方法及びプログラム
20日前
KDDI株式会社
特徴量間の交互作用を考慮した対象数推定プログラム、装置、システム及び方法
13日前
KDDI株式会社
測位データを補間するプログラム、装置及び方法、並びに対象数推定プログラム
1日前
トヨタ自動車株式会社
車両データ管理装置、車両データ管理プログラムおよび車両データ管理方法
22日前
KDDI株式会社
情報処理装置、情報処理方法、携帯通信端末及びプログラム
1か月前
KDDI株式会社
端末装置、仮想空間サービス管理装置及び仮想空間サービス制御方法
1か月前
個人
飛行体
1か月前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
自由落下運航システム
1か月前
個人
マルチコプター
11か月前
個人
マルチコプター型電気飛行機
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ