TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024040070
公報種別
公開特許公報(A)
公開日
2024-03-25
出願番号
2022144915
出願日
2022-09-12
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
G01S
19/03 20100101AFI20240315BHJP(測定;試験)
要約
【課題】測位に係る全体の通信量を抑制し、演算負荷を抑制することができる作業機械を提供すること。
【解決手段】測位衛星から送信される測位信号と基準局から送信される補正データとに基づいて、自機の位置を計測する測位装置と、測位装置と基準局との通信を制御するコントローラとを備えた作業機械において、走行中の場合、または、作業装置が予め定めた目標面に沿って動作するように作業装置をガイダンスするガイダンスシステムが無効状態となっている場合に、コントローラは、測位装置と基準局との通信速度を低減させるように制御する。
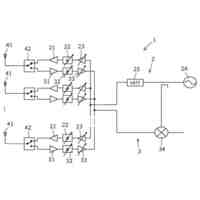
【選択図】 図4
特許請求の範囲
【請求項1】
測位衛星から送信される測位信号と基準局から送信される補正データとに基づいて、自機の位置を計測する測位装置と、
前記測位装置と前記基準局との通信速度を制御するコントローラとを備えた作業機械において、
走行中の場合、または、作業装置が予め定めた目標面に沿って動作するように前記作業装置をガイダンスするマシンガイダンスシステムが無効状態となっている場合に、前記コントローラは、前記測位装置と前記基準局との通信速度を低減させるように制御することを特徴とすることを特徴とする作業機械。
続きを表示(約 1,200 文字)
【請求項2】
請求項1記載の作業機械において、
動作状態を検出する車体状態検出センサを備え、
前記コントローラは、
前記車体状態検出センサの検出結果に基づいて、走行動作を検出した場合には、前記測位装置と前記基準局との通信速度を低減することを特徴とする作業機械。
【請求項3】
請求項2記載の作業機械において、
前記コントローラは、
前記車体状態検出センサから取得した車体状態情報を用いて走行速度を演算し、
前記走行速度が予め定めた基準速度よりも大きい場合には、前記測位装置と前記基準局との通信速度を低減し、
前記走行速度が前記基準速度以下の場合には、前記通信速度を維持することを特徴とする作業機械。
【請求項4】
請求項1記載の作業機械において、
運転席内に前記マシンガイダンスシステムの有効状態と無効状態とを切換えるガイダンススイッチを備え、
前記コントローラは、
前記マシンガイダンスシステムが前記ガイダンススイッチによって無効状態に切り換えられている場合には、前記測位装置と前記基準局との通信速度を低減することを特徴とする作業機械。
【請求項5】
請求項1記載の作業機械において、
動作状態を検出する車体状態検出センサと、
運転席内に前記マシンガイダンスシステムの有効状態と無効状態とを切換えるガイダンススイッチとを備え、
前記コントローラは、
前記車体状態検出センサの検出結果に基づいて、走行動作を検出し、かつ、前記マシンガイダンスシステムが前記ガイダンススイッチによって無効状態に切り換えられている場合にのみ、前記測位装置と前記基準局との通信速度を低減することを特徴とする作業機械。
【請求項6】
請求項1記載の作業機械において、
動作状態を検出する車体状態検出センサと、
運転席内に前記マシンガイダンスシステムの有効状態と無効状態とを切換えるガイダンススイッチを備え、
前記コントローラは、
前記マシンガイダンスシステムが前記ガイダンススイッチによって有効状態に切り換えられている場合には、前記車体状態検出センサから取得した車体状態情報に基づいて、予め定めた目標面と作業装置との距離を演算し、前記目標面と前記作業装置との距離に基づいて、前記測位装置と前記基準局との通信速度を低減することを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記コントローラは、前記目標面と前記作業装置との距離が基準距離よりも大きい状態であった時間が基準時間よりも大きい場合には、前記測位装置と前記基準局との通信速度を低減することを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
土木工事等に使用される作業機械には、GNSS(Global Navigation Satellite System)や車体姿勢センサを用いて作業装置の先端位置を求め、施工3D図面と合わせて表示することにより作業を支援するマシンガイダンスやマシンコントロールを使用するものが増えてきている。このような作業機械による施工を行う場合には、GNSSによる車体位置を確実に精度よく測位できる必要がある。GNSS測位のうち精度を必要とするものには、RTK-GNSS測位が標準的に使用されている。RTK-GNSS測位では、既知点に設置したGNSS基準局より補正データを無線送信し、受信した移動局にて基準局からの相対位置を算出するとともに、既知点の座標とあわせることで移動局の3次元座標を精度良く求めることができる。そして、このような移動局を作業機械に搭載することにより作業機械の位置を得ることができる。なお、既知点にGNSS基準点を設置する代わりに、複数の電子基準点からのデータより、仮想的な基準点を生成して補正データを配信するVRS(Virtual Reference Station)サービスを使用しても同様に測量可能である。
【0003】
RTK-GNSS測位で用いられる補正データは格化されており、例えば、RTCM(Radio Technical Commission for Maritime Services)方式が一般に使用されている。この補正データには、基準局で受信された各GNSS衛星の観測結果が含まれており、衛星数が増加すると補正データのデータ量が大きくなる。GNSS衛星は当初はGPS衛星のみであったが、近年では衛星数の増加による補正データのデータ量増加に伴い、無線通信などに使われる通信機器の負荷が高くなってしまう。
【0004】
このような課題に対し、測位に使用する補正データのデータ送信量を低減し、また、送信する補正データの精度を向上させることを目的とする従来技術が知られている。例えば、特許文献1には、測位情報を送信する人工衛星から前記測位情報を受信して所定の情報を出力する複数の電子基準点のそれぞれから、前記所定の情報を電子基準点情報として収集する収集部と、前記収集部の収集した前記電子基準点情報を使用することにより、前記電子基準点の位置を測位する場合の測位精度に影響するとともに前記電子基準点のそれぞれに固有な誤差量を示す基準点固有誤差を前記複数の電子基準点のそれぞれについて計算する第1計算部と、所定の地域を示す地域データに前記地域の中の位置を示す複数の位置表示点を設定し、設定した前記複数の位置表示点のそれぞれに対して、前記位置表示点の示す位置を測位する場合の測位精度に影響するとともに前記位置表示点のそれぞれに固有な誤差量を示す表示点固有誤差データを前記第1計算部が前記複数の電子基準点のそれぞれについて計算した前記基準点固有誤差に基づいて計算し、前記複数の位置表示点のそれぞれに対して計算した複数の前記表示点固有誤差データを送信対象データとして出力する第2計算部と、前記第2計算部が出力した前記送信対象データをデータ伝送するデータ送信部とを備えたデータ送信装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2007-093513号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の技術においては、電子基準点を用いることが前提となっているため、電子基準点を使えない場合や他の基準局を用いる場合などには測位精度の向上効果を期待できない。また、電子基準点からの情報を用いて補正データを得る際、国土すべての電子基準点の情報を取集し、その情報から地点を細分化した基準点情報を演算する必要がある。そのため、通信量及び記憶すべきデータ量が非常に多くなってしまう。また、演算する過程では測位したい地点から近い地域の補正データを有するため、収集された情報から必要な情報を取り出して演算する処理を繰り返し行うことが必要となり、処理に係る負荷も非常に大きなものとなってしまう。
【0007】
本発明は上記に鑑みてなされたものであり、測位に係る全体の通信量を抑制し、演算負荷を抑制することができる作業機械を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、測位衛星から送信される測位信号と基準局から送信される補正データとに基づいて、自機の位置を計測する測位装置と、前記測位装置と前記基準局との通信速度を制御するコントローラとを備えた作業機械において、走行中の場合、または、作業装置が予め定めた目標面に沿って動作するように前記作業装置をガイダンスするマシンガイダンスシステムが無効状態となっている場合に、前記コントローラは、前記測位装置と前記基準局との通信速度を低減させるように制御するものとする。
【発明の効果】
【0009】
本発明によれば、測位に係る全体の通信量を抑制し、演算負荷を抑制することができる。
【図面の簡単な説明】
【0010】
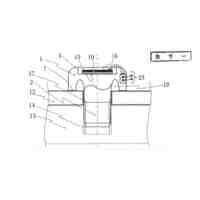
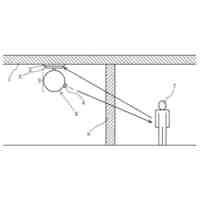
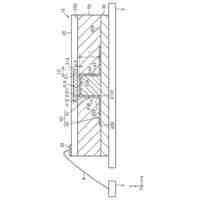
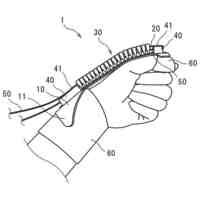
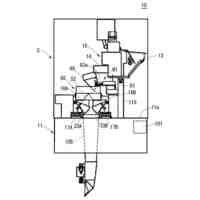
作業機械の一例である油圧ショベルの外観を基準局とともに概略的に示す側面図である。
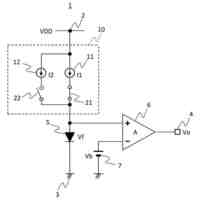
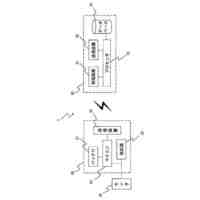
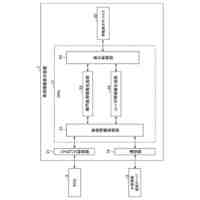
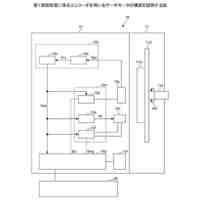
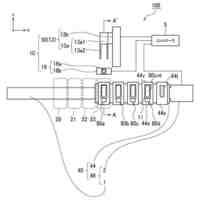
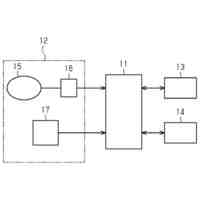
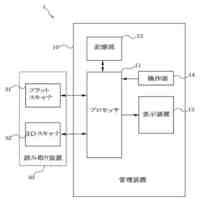
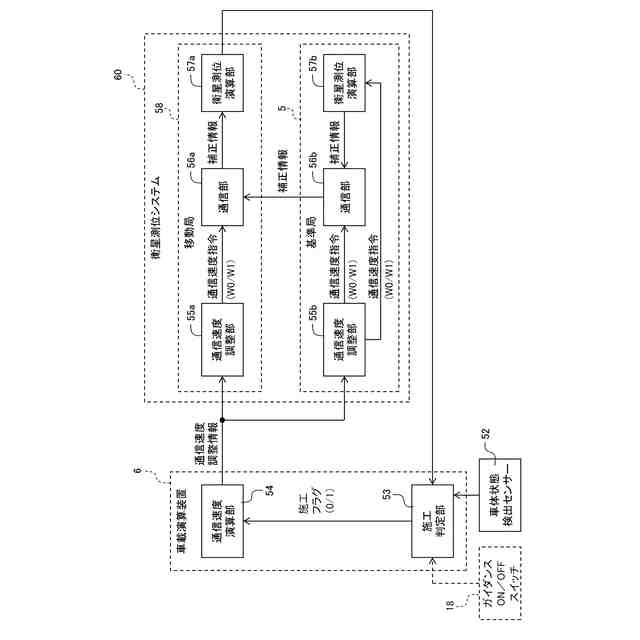
車載演算装置および衛星測位システムの処理内容を示す機能ブロック図である。
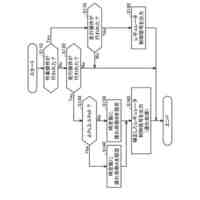
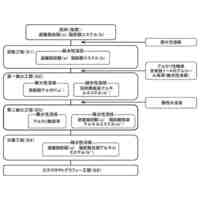
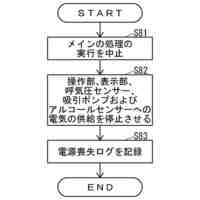
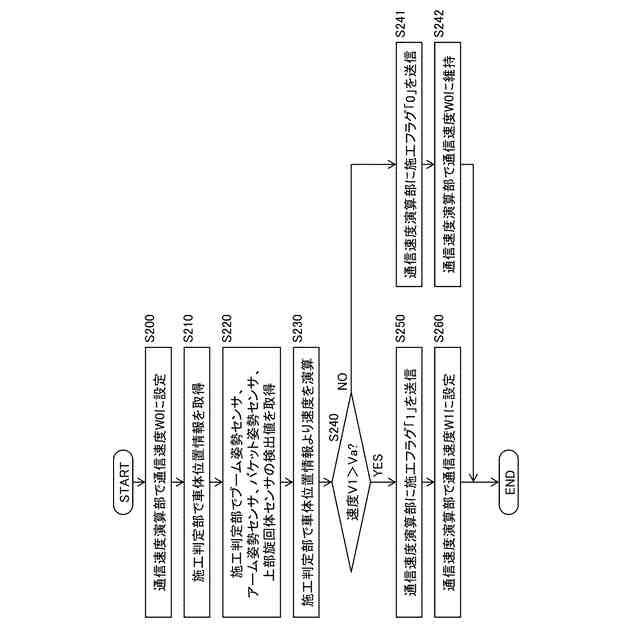
測位演算に係る処理の全体の流れを示すフローチャートである。
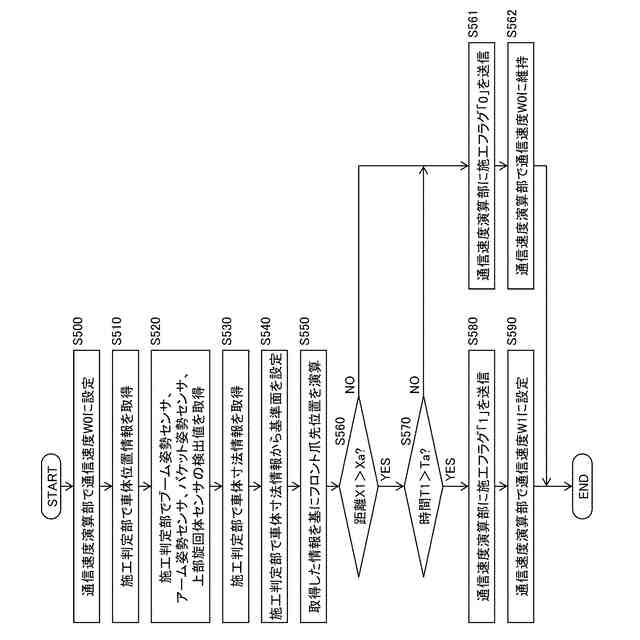
第1の実施の形態における施工状態判定処理の内容を示すフローチャートである。
第2の実施の形態における施工状態判定処理の内容を示すフローチャートである。
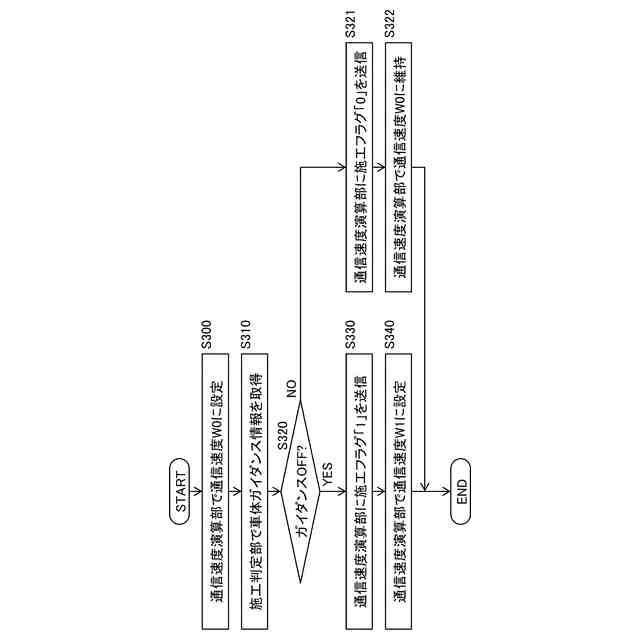
第3の実施の形態における施工状態判定処理の内容を示すフローチャートである。
第4の実施の形態における施工状態判定処理の内容を示すフローチャートである。
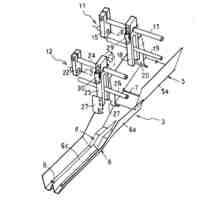
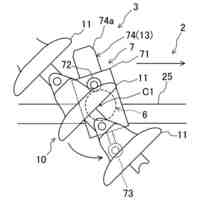
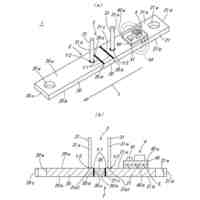
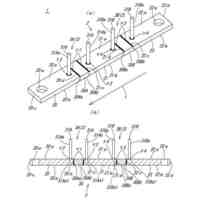
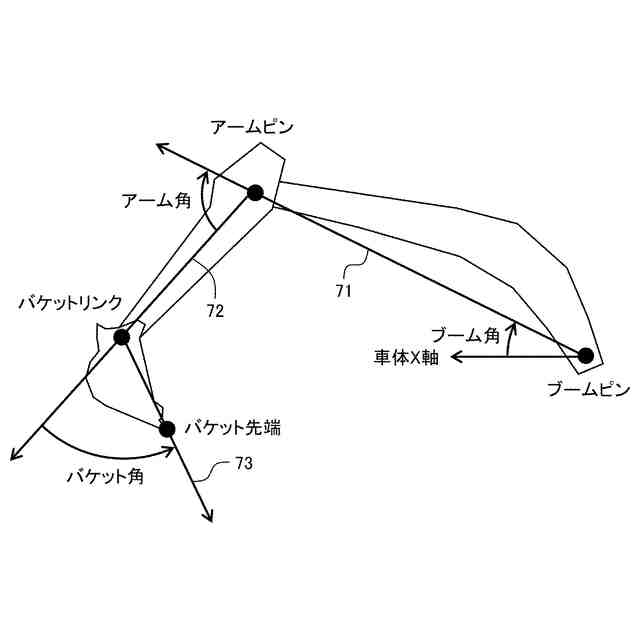
フロント作業装置の相対角度の検出方法を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
1か月前
日東精工株式会社
検査装置
23日前
キヤノン株式会社
枠部材
2日前
大和製衡株式会社
組合せ秤
19日前
個人
交差点形状表現アルゴリズム
15日前
日本電波工業株式会社
感知センサ
1日前
株式会社SUBARU
車両
1日前
エイブリック株式会社
温度センサ
19日前
テクノス株式会社
反射装置
18日前
日本無線株式会社
レーダ装置
8日前
個人
多元作用力検出機能性締結金具
8日前
エイブリック株式会社
半導体装置。
19日前
株式会社D.O.N
人感装置
19日前
住江織物株式会社
排尿検知システム
3日前
月島食品工業株式会社
分析方法
18日前
ローム株式会社
磁気検出装置
17日前
ミツミ電機株式会社
測距装置
17日前
中国電力株式会社
不良碍子検出装置
18日前
株式会社大林組
風速再現装置
19日前
フォロフライ株式会社
情報処理装置
23日前
富士電機株式会社
エンコーダ
23日前
ヤマハ株式会社
歪センサ装置
19日前
株式会社昭和測器
ロードセル
17日前
サンコール株式会社
電流検出器
18日前
株式会社 キョーワ
食品秤量搬送装置
2日前
サンコール株式会社
電流検出器
18日前
株式会社ビードットメディカル
計測装置
1日前
キヤノン株式会社
検査装置及び検査方法
2日前
トヨタ自動車株式会社
回路基板の検査方法
3日前
住友金属鉱山株式会社
異物検査装置
1日前
バイオニクス株式会社
光学測定装置
9日前
中部電力株式会社
電柱位置記憶装置
19日前
株式会社デンソーウェーブ
携帯端末
17日前
株式会社イシダ
X線検査装置
17日前
東海電子株式会社
電子機器およびプログラム
10日前
株式会社バンダイ
検査プログラム及び検査システム
2日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ