TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170868
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075680
出願日
2024-05-08
発明の名称
制御装置及び制御方法
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
G05B
13/02 20060101AFI20251113BHJP(制御;調整)
要約
【課題】簡単な方法によって制御パラメータの値を精度良く求めることができる制御装置または制御方法を実現する。
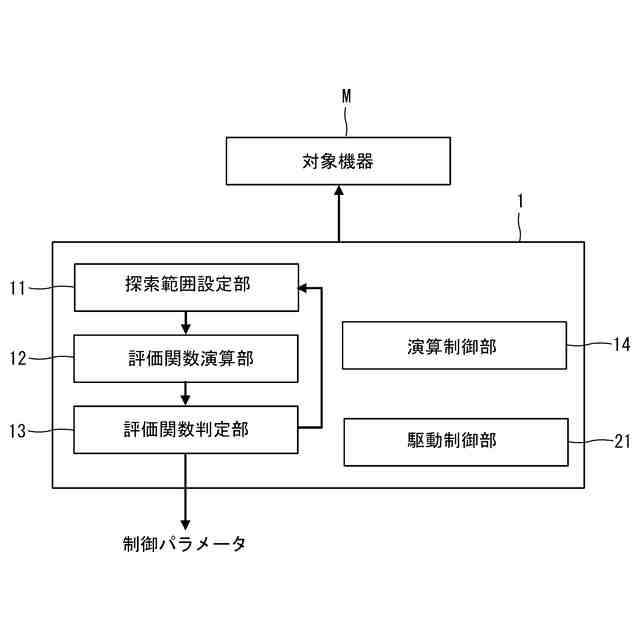
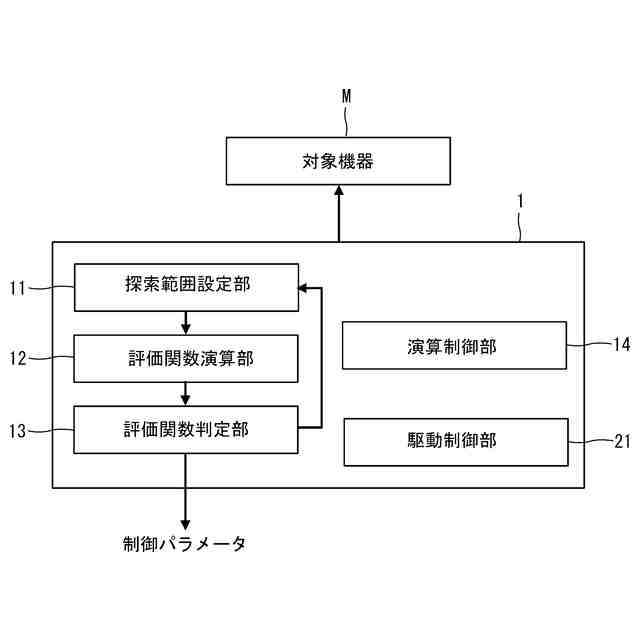
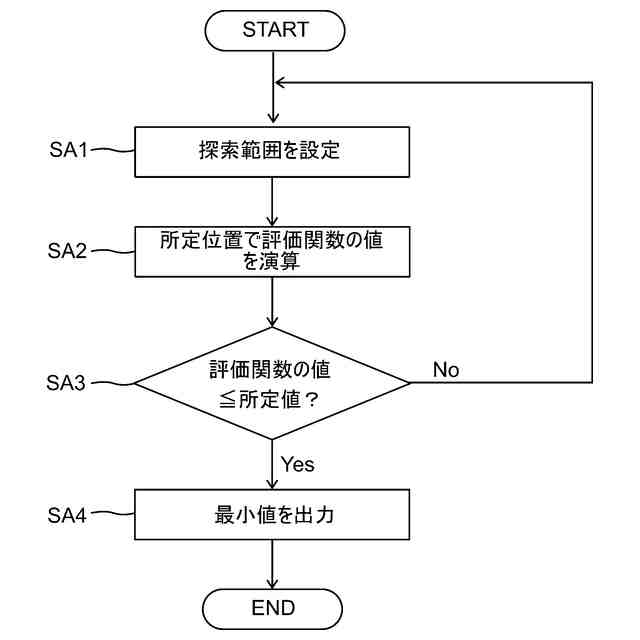
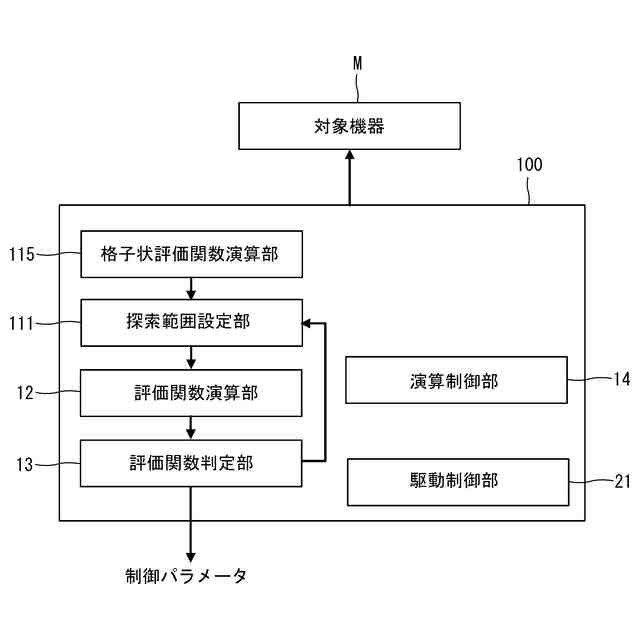
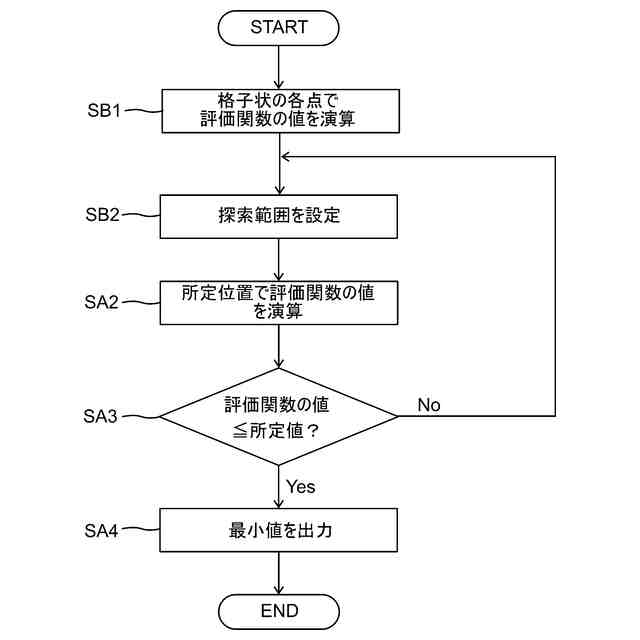
【解決手段】制御装置1は、探索範囲設定部11と、複数の所定位置で評価関数を演算する評価関数演算部12と、前記評価関数の値が所定値以下かどうかを判定する評価関数判定部13と、前記評価関数の値が所定値以下でない場合、前記評価関数の値が最小である位置を中心とし、探索範囲と相似形状を有するとともに前記探索範囲よりも小さい範囲を新たな探索範囲とし、前記新たな探索範囲に含まれる複数の所定位置における前記評価関数を演算させ、前記評価関数の値が所定値以下になるまで、前記探索範囲の設定及び前記評価関数の演算を繰り返し実行させる一方、前記評価関数の値が所定値以下の場合、制御パラメータの値を出力する演算制御部14とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
制御における複数の制御パラメータの最適値を探索可能な制御装置であって、
前記複数の制御パラメータによって規定される探索範囲を設定する探索範囲設定部と、
前記探索範囲に含まれる複数の所定位置における複数の制御パラメータの値を用いて、前記複数の所定位置において前記制御の応答目標値と前記複数の制御パラメータの値を用いた前記制御の応答値との差分を示す評価関数の値を演算する評価関数演算部と、
前記評価関数演算部によって演算された前記評価関数の値が所定値以下であるかどうかを判定する評価関数判定部と、
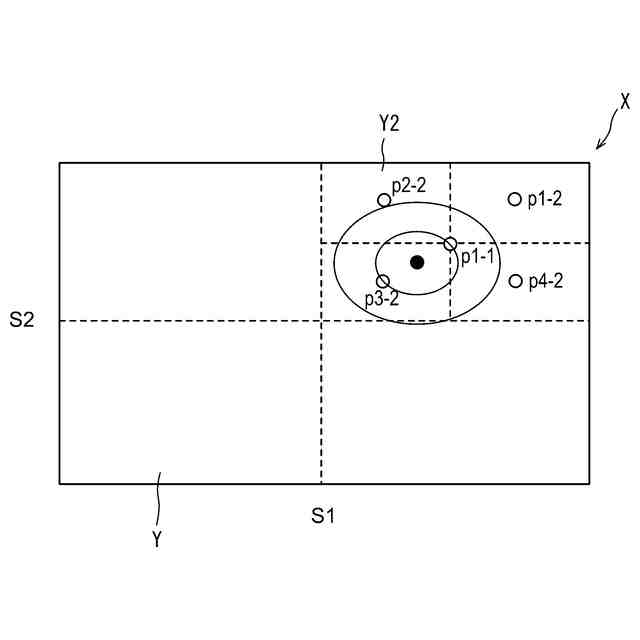
前記評価関数判定部によって前記評価関数の値が所定値以下であると判定されなかった場合に、前記複数の所定位置のうち前記評価関数演算部によって演算された前記評価関数の値が最小である所定位置を中心とし、且つ、前記探索範囲と相似形状を有するとともに前記探索範囲よりも小さい範囲を、前記探索範囲設定部によって新たな探索範囲として設定して、前記評価関数演算部によって、前記新たな探索範囲に含まれる複数の所定位置における前記評価関数の値を演算させ、
前記評価関数判定部によって前記評価関数の値が所定値以下であると判定されるまで、前記探索範囲設定部による探索範囲の設定及び前記評価関数演算部による前記探索範囲に含まれる複数の所定位置における評価関数の値の演算を繰り返し実行させる一方、前記評価関数判定部によって前記評価関数の値が所定値以下であると判定された場合には、その評価関数の演算に用いられた制御パラメータの値を出力する演算制御部と、
を有する、
制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の制御装置において、
前記制御は、P制御またはI制御の少なくとも一方を含む制御であり、
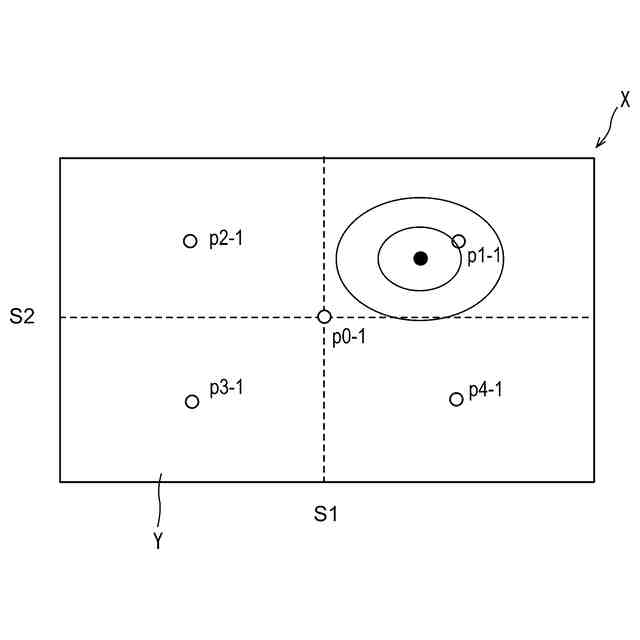
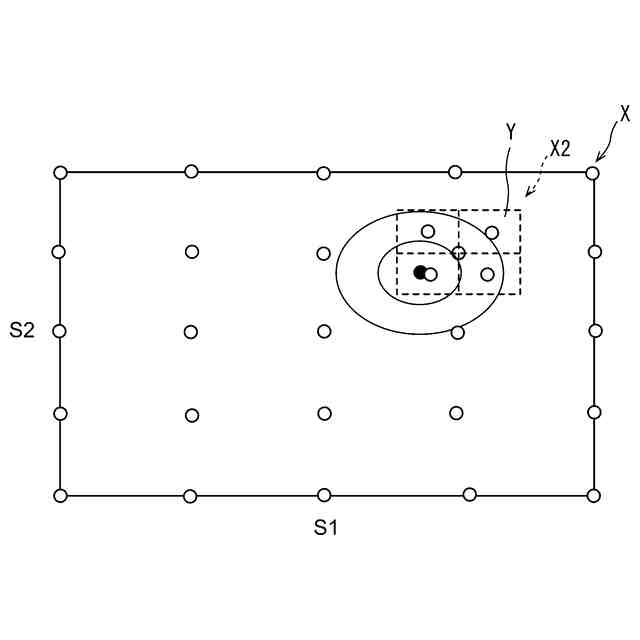
前記所定位置は、前記探索範囲と相似形状を有し且つ前記探索範囲を等分する仮想領域の中心位置である、
制御装置。
【請求項3】
請求項2に記載の制御装置において、
前記複数の所定位置は、前記探索範囲の中心位置を含み、
前記評価関数演算部は、前記探索範囲の中心位置で前記評価関数の値を演算する、
制御装置。
【請求項4】
請求項1に記載の制御装置において、
前記探索範囲内で格子状の各点における複数の制御パラメータの値を用いて、前記評価関数の値を求める格子状評価関数演算部をさらに有し、
前記探索範囲設定部は、前記格子状の各点のうち前記評価関数の値が最小である点を中心として、前記新たな探索範囲を設定する、
制御装置。
【請求項5】
制御における複数の制御パラメータの最適値を求めるための制御方法であって、
前記複数の制御パラメータによって規定される探索範囲を設定する探索範囲設定ステップと、
前記探索範囲に含まれる複数の所定位置における複数の制御パラメータの値を用いて、前記複数の所定位置において前記制御の応答目標値と前記複数の制御パラメータの値を用いた前記制御の応答値との差分を示す評価関数の値を演算する評価関数演算ステップと、
前記評価関数演算ステップで演算された前記評価関数の値が所定値以下であるかどうかを判定する評価関数判定ステップと、
前記評価関数判定ステップで前記評価関数の値が所定値以下であると判定されなかった場合に、前記複数の所定位置のうち前記評価関数演算ステップで演算された前記評価関数の値が最小である所定位置を中心とし、且つ、前記探索範囲と相似形状を有するとともに前記探索範囲よりも小さい範囲を、前記探索範囲設定ステップで新たな探索範囲に設定し、前記評価関数演算ステップで前記新たな探索範囲に含まれる複数の所定位置における評価関数の値を演算させ、
前記評価関数判定ステップで前記評価関数の値が所定値以下であると判定されるまで、前記探索範囲設定ステップでの探索範囲の設定及び前記評価関数演算ステップでの前記探索範囲に含まれる複数の所定位置における評価関数の値の演算を繰り返し実行させる一方、前記評価関数判定ステップで前記評価関数の値が所定値以下であると判定された場合には、その評価関数の演算に用いられたパラメータの値を出力する演算制御ステップと、
を有する、
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の制御パラメータの最適値を探索可能な制御装置及び前記最適値を求めるための制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
複数の制御パラメータの最適値を探索可能な制御装置または制御方法が知られている。このような制御装置として、例えば特許文献1には、PID制御を行う制御器と、前記制御器の制御パラメータの探索空間において最適化アルゴリズムによりパラメータ探索することで、前記制御パラメータの値を最適化する自動調整システムとを有する制御システムが開示されている。
【0003】
前記制御システムは、パラメータ探索空間に含まれる複数の探索点を抽出し、前記複数の探索点に対して順序を付与し、前記順序を示す値を、パラメータを探索するために操作される探索対象として、最適化アルゴリズムを実行する。
【先行技術文献】
【特許文献】
【0004】
特開2020-140345号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
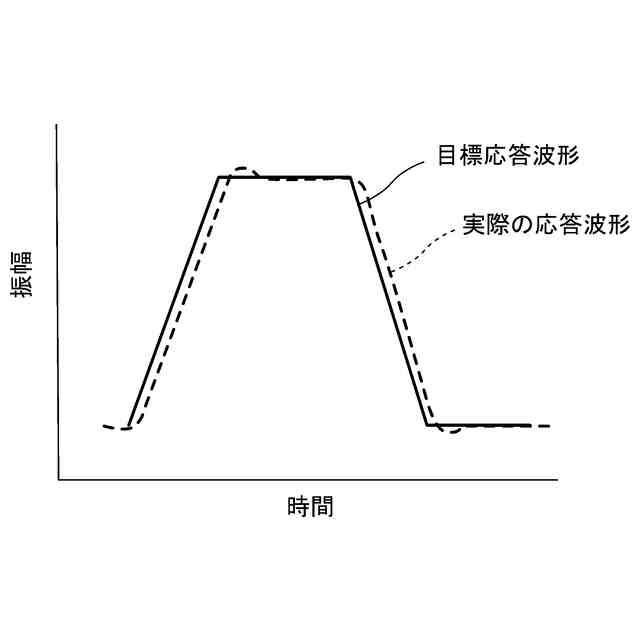
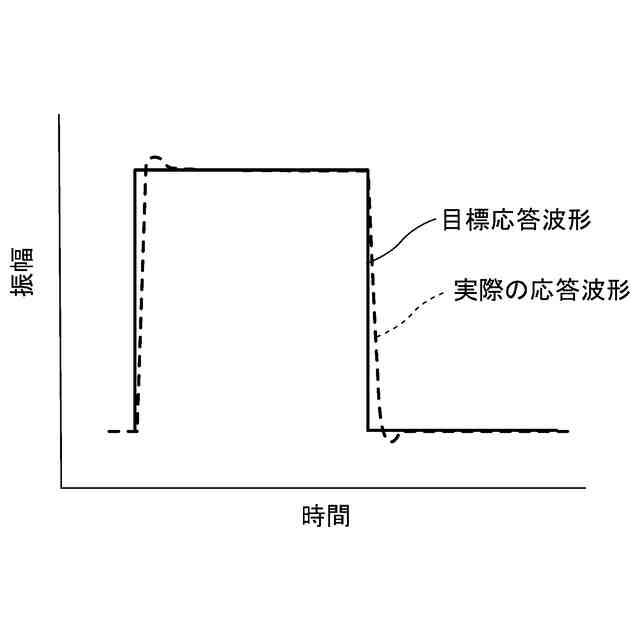
ところで、制御パラメータの値の探索を行う方法は、上述の特許文献1の方法以外にも検討されている。例えば、制御パラメータの探索方法として、結果を見ながら試行錯誤してパラメータの値を求めるIFT(Iterative feedback tuning)、応答波形の特徴からパラメータの値を計算で求めるオートチューニング、及び、実際の応答波形と目標の応答波形との差異が最小になるパラメータの値を、最適化問題を解くことにより求めるデータ駆動制御器設計法などが知られている。
【0006】
しかしながら、前記特許文献1に開示されている方法では、パラメータ探索空間に含まれる複数の探索点を抽出する必要があるとともに、前記複数の探索点に対して順序を付与する必要がある。また、前記IFTは、試行錯誤する作業員の経験や熟練の度合いによって作業時間や調整結果が変わるため、良好な結果が得られない場合がある。また、前記オートチューニングは、使い方が難しく、専門知識が必要であるため、用途が限定される。さらに、前記データ駆動制御器設計法は、設計の難度が高いため、ほとんど実用化されていない。
【0007】
これに対し、簡単な方法によって制御パラメータの値を精度良く求めることができる制御装置または制御方法が求められている。
【0008】
本発明の目的は、簡単な方法によって制御パラメータの値を精度良く求めることができる制御装置または制御方法を実現することにある。
【課題を解決するための手段】
【0009】
本発明の一実施形態に係る制御装置は、制御における複数の制御パラメータの最適値を探索可能な装置である。前記制御装置は、前記複数の制御パラメータによって規定される探索範囲を設定する探索範囲設定部と、前記探索範囲に含まれる複数の所定位置における複数の制御パラメータの値を用いて、前記複数の所定位置において前記制御の応答目標値と前記複数の制御パラメータの値を用いた前記制御の応答値との差分を示す評価関数の値を演算する評価関数演算部と、前記評価関数演算部によって演算された前記評価関数の値が所定値以下であるかどうかを判定する評価関数判定部と、前記評価関数判定部によって前記評価関数の値が所定値以下であると判定されなかった場合に、前記複数の所定位置のうち前記評価関数演算部によって演算された前記評価関数の値が最小である所定位置を中心とし、且つ、前記探索範囲と相似形状を有するとともに前記探索範囲よりも小さい範囲を、前記探索範囲設定部によって新たな探索範囲として設定して、前記評価関数演算部によって、前記新たな探索範囲に含まれる複数の所定位置における前記評価関数の値を演算させ、前記評価関数判定部によって前記評価関数の値が所定値以下であると判定されるまで、前記探索範囲設定部による探索範囲の設定及び前記評価関数演算部による前記探索範囲に含まれる複数の所定位置における評価関数の値の演算を繰り返し実行させる一方、前記評価関数判定部によって前記評価関数の値が所定値以下であると判定された場合には、その評価関数の演算に用いられた制御パラメータの値を出力する演算制御部と、を有する(第1の構成)。
【0010】
上述の構成では、探索範囲において、複数の所定位置における制御パラメータの値を用いて演算される評価関数の値が最小である所定位置を中心とし、且つ、前記探索範囲と相似形状を有するとともに前記探索範囲よりも小さい範囲を、新たな探索範囲に設定する。しかも、制御の応答目標値と複数の制御パラメータを用いた前記制御の応答値との差分を示す評価関数の値が所定値以下になるまで、探索範囲の設定と、設定後の探索範囲に含まれる複数の所定位置における複数の制御パラメータの値を用いた前記評価関数の演算とを行う。これにより、従来に比べて簡単な方法によって、制御の応答目標値に近い応答値が得られる制御パラメータの値を、迅速に且つ精度良く求めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
個人
作業車両自動化システム
3か月前
株式会社クボタ
作業車
24日前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
11日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
3か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
物品搬送設備
25日前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
配送システム
2か月前
トヨタ自動車株式会社
制御装置
1か月前
カヤバ株式会社
減圧弁
1か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社ダイフク
物品搬送設備
3日前
村田機械株式会社
搬送車システム
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
株式会社アマダ
工作機械制御装置
1か月前
日野自動車株式会社
自動運転装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
株式会社CAOS
移動体の制御システム
2か月前
株式会社TMEIC
安全性診断装置
1か月前
ローム株式会社
電源回路用の電子負荷装置
1か月前
株式会社明電舎
負荷制御装置
26日前
株式会社カーメイト
アクセルペダルカバー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ