TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153949
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056688
出願日
2024-03-29
発明の名称
情報処理装置および情報処理方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
G01S
19/49 20100101AFI20251002BHJP(測定;試験)
要約
【課題】受信したGNSS(Global Navigation Satellite
System)信号の信頼性が高くない場合にも、精度よく車両の位置を推定する。
【解決手段】本開示に係る情報処理装置は、車両の位置を推定する情報処理装置であって、GNSS信号を受信することと、前記車両の走行状態を示す情報を取得することと、以前に取得された前記車両の位置情報と前記車両の前記走行状態を示す情報とから推定された前記車両の位置である第一の位置と、前記GNSS信号に基づいて算出された第二の位置とが整合しているか否かに基づいて、前記GNSS信号に基づいて前記車両の位置を推定するか、前記車両の前記走行状態を示す情報に基づいて前記車両の位置を推定するかを決定することと、を実行する制御部を有する。
【選択図】図2
特許請求の範囲
【請求項1】
車両の位置を推定する情報処理装置であって、
GNSS(Global Navigation Satellite System)信号を受信することと、
前記車両の走行状態を示す情報を取得することと、
以前に取得された前記車両の位置情報と前記車両の前記走行状態を示す情報とから推定された前記車両の位置である第一の位置と、前記GNSS信号に基づいて算出された第二の位置とが整合しているか否かに基づいて、前記GNSS信号に基づいて前記車両の位置を推定するか、前記車両の前記走行状態を示す情報に基づいて前記車両の位置を推定するかを決定することと、
を実行する制御部を有する、
情報処理装置。
続きを表示(約 730 文字)
【請求項2】
前記制御部は、
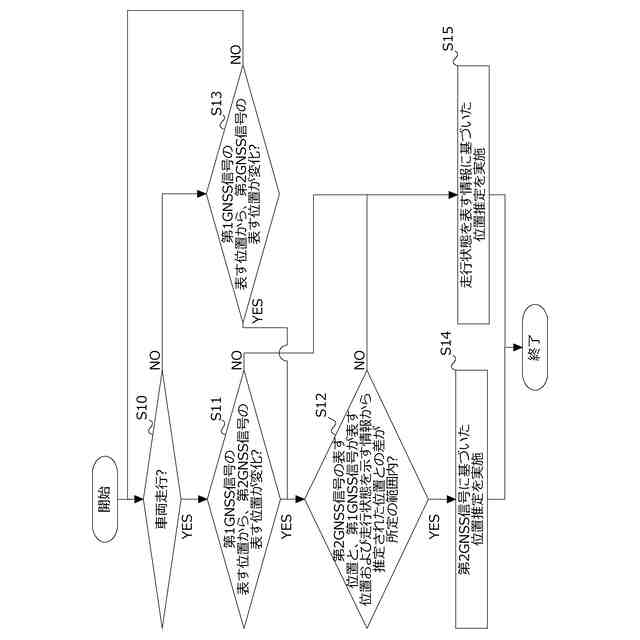
前記第一の位置と、前記第二の位置との差が所定の範囲内である場合、
前記GNSS信号に基づいて前記車両の位置を推定する、
請求項1に記載の情報処理装置。
【請求項3】
前記制御部は、
前記車両が走行状態にあると判定した場合であって、前記GNSS信号に基づいて算出された前記車両の位置が変化していないと判定した場合、
前記車両の前記走行状態を示す情報に基づいて、前記車両の位置の推定を行う、
請求項1または2に記載の情報処理装置。
【請求項4】
前記制御部は、
前記車両が走行状態にないと判定した場合であって、前記GNSS信号に基づいて算出された前記車両の前記位置が変化していないと判定した場合、
前記車両の位置を推定しない、
請求項1または2に記載の情報処理装置。
【請求項5】
車両の位置を推定する情報処理方法であって、
GNSS(Global Navigation Satellite System)信号を受信するステップと、
前記車両の走行状態を示す情報を取得するステップと、
以前に取得された前記車両の位置情報と前記車両の前記走行状態を示す情報とから推定された前記車両の位置である第一の位置と、前記GNSS信号に基づいて算出された第二の位置とが整合しているか否かに基づいて、前記GNSS信号に基づいて前記車両の位置を推定するか、前記車両の前記走行状態を示す情報に基づいて前記車両の位置を推定するかを決定するステップと、
を含む、
情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の位置の推定に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
車両の位置を推定する技術が数多く知られている。これに関して、例えば、特許文献1には、GPS(Global Positioning System)信号を取得できない場合、最後に通過したチェックポイントに対応付けられている重みと、車速と、最後にGPS信号を取得した時点からの経過時間に基づき、車両の走行位置を特定する車載装置等が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-60436号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、受信したGNSS(Global Navigation Satellite System)信号の信頼性が高くない場合にも、精度よく車両の位置を推定することを目的とする。
【課題を解決するための手段】
【0005】
本開示の実施形態の一態様は、
車両の位置を推定する情報処理装置であって、GNSS信号を受信することと、前記車両の走行状態を示す情報を取得することと、以前に取得された前記車両の位置情報と前記車両の前記走行状態を示す情報とから推定された前記車両の位置である第一の位置と、前記GNSS信号に基づいて算出された第二の位置とが整合しているか否かに基づいて、前記GNSS信号に基づいて前記車両の位置を推定するか、前記車両の前記走行状態を示す情報に基づいて前記車両の位置を推定するかを決定することと、を実行する制御部を有する情報処理装置である。
【0006】
また、本開示の実施形態の一態様は、
車両の位置を推定する情報処理方法であって、GNSS信号を受信するステップと、前記車両の走行状態を示す情報を取得するステップと、以前に取得された前記車両の位置情報と前記車両の前記走行状態を示す情報とから推定された前記車両の位置である第一の位置と、前記GNSS信号に基づいて算出された第二の位置とが整合しているか否かに基づいて、前記GNSS信号に基づいて前記車両の位置を推定するか、前記車両の前記走行状態を示す情報に基づいて前記車両の位置を推定するかを決定するステップと、を含む、
情報処理方法である。
【0007】
また、他の態様として、上記の方法、当該方法をコンピュータに実行させるためのプログラム、または、該プログラムを非一時的に記憶したコンピュータ可読記憶媒体が挙げられる。
【発明の効果】
【0008】
本開示によれば、受信したGNSS信号の信頼性が高くない場合にも、精度よく車両の位置を推定することができる。
【図面の簡単な説明】
【0009】
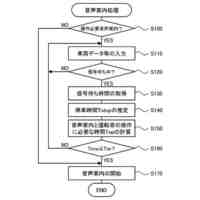
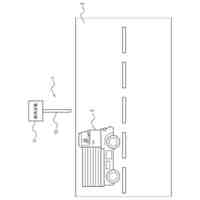
実施形態に係る車載装置が実行する処理の例を示す図。
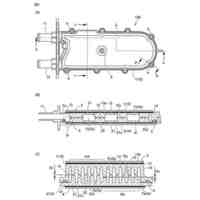
実施形態に係る車載装置を含むシステムが有する構成要素を説明する図。
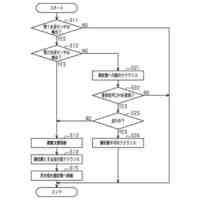
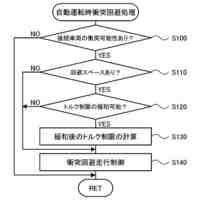
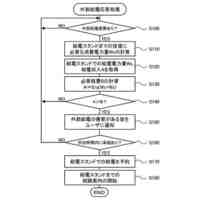
実施形態に係る車載装置の制御部が実行する処理のフローチャート。
【発明を実施するための形態】
【0010】
走行している自車両の位置を推定するシステムが知られている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
固定子
3日前
トヨタ自動車株式会社
加熱器
2日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
回転子
9日前
トヨタ自動車株式会社
ケース
4日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
電解液
9日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
バッテリ
3日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
車両構造
2日前
トヨタ自動車株式会社
監視装置
3日前
トヨタ自動車株式会社
塗工装置
3日前
トヨタ自動車株式会社
製造装置
3日前
トヨタ自動車株式会社
蓄電セル
9日前
トヨタ自動車株式会社
切断装置
9日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
電源装置
9日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
バッテリ
3日前
トヨタ自動車株式会社
ロボット
5日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
車載装置
2日前
トヨタ自動車株式会社
路側装置
4日前
トヨタ自動車株式会社
通話装置
2日前
トヨタ自動車株式会社
蓄電装置
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ