TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148359
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2025100940,2022145748
出願日
2025-06-17,2022-09-14
発明の名称
衝突回避支援装置及び衝突回避支援プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/09 20120101AFI20250930BHJP(車両一般)
要約
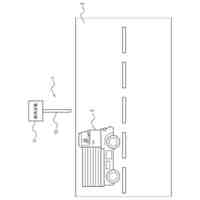
【課題】前側及び後側のスタビライザの両方が非連結状態にある状況にて障害物との衝突を回避するための自動操舵が行われることに起因して車両の挙動が不安定になることを防止することができる衝突回避支援装置を提供する。
【解決手段】連結状態及び非連結状態に制御されるクラッチ式の前輪側及び後輪側のスタビライザ62、64を備えた車両102に適用され、車両の前方に障害物があるときには、障害物との衝突を回避するための目標軌跡に沿って車両を走行させるための目標操舵角θtを演算し、操舵輪を自動的に操舵する自動操舵装置44を目標操舵角にて制御するよう構成された制御ユニットを含む衝突回避支援装置であって、制御ユニットは、前輪側及び後輪側の両方のスタビライザが非連結状態にあるときには、障害物との衝突を回避する必要があると判定しても、自動操舵装置を制御しない。
【選択図】図2
特許請求の範囲
【請求項1】
連結状態及び非連結状態に制御されるクラッチ式の前輪側及び後輪側のスタビライザと、操舵輪を自動的に操舵する自動操舵装置とを備えた車両に適用され、車両の前方の障害物との衝突を回避する必要があると判定したときには、前記障害物との衝突を回避するための目標軌跡に沿って車両を走行させるための目標制御量を演算し、前記目標制御量にて前記自動操舵装置を制御するよう構成された制御ユニットと、を含む衝突回避支援装置であって、
前記制御ユニットは、前輪側及び後輪側のスタビライザが非連結状態にあるときには、車両の前方の障害物との衝突を回避する必要があると判定しても、前記自動操舵装置を制御しないよう構成された、衝突回避支援装置。
続きを表示(約 270 文字)
【請求項2】
請求項1に記載の衝突回避支援装置であって、前記制御ユニットは、前記前輪側及び後輪側のスタビライザが非連結状態にあるときには、車両の前方の障害物との衝突を回避する必要があると判定しても、車両を前記目標軌跡に沿って走行させるための目標制御量を演算しないよう構成された、衝突回避支援装置。
【請求項3】
請求項1に記載の衝突回避支援装置であって、前記制御ユニットは、前記自動操舵装置を制御しないときには、障害物との衝突を回避するための自動操舵が行われない旨の警報を発出するよう構成された、衝突回避支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両のための衝突回避支援装置及び衝突回避支援プログラムに係る。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
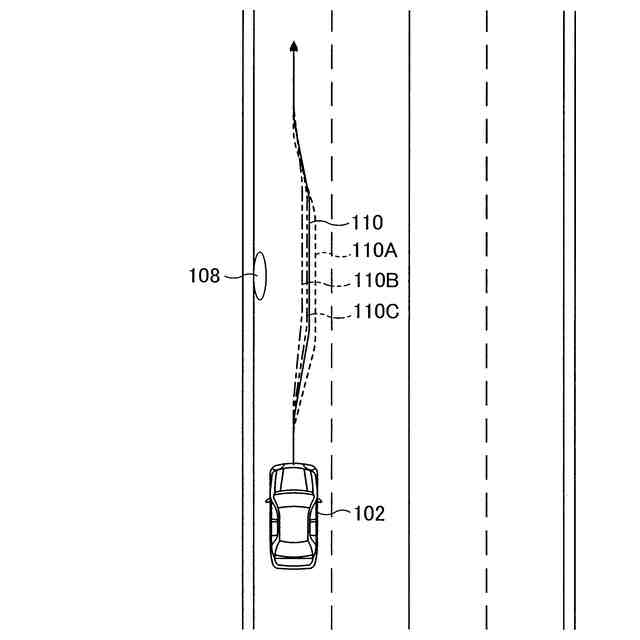
自動車などの車両のための運転支援装置の一つとして、自動操舵による衝突回避支援装置が知られている。衝突回避支援装置は、車両の前方の障害物との衝突を回避する必要があるときには、障害物との衝突を回避するための目標軌跡に沿って車両を走行させるための目標操舵角を演算し、操舵角が目標操舵角になるように自動操舵装置を制御する。
【0003】
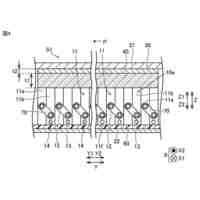
ところで、自動車などの車両には、車両のロール剛性を確保するための前側及び後側のスタビライザが組み込まれている。スタビライザは、左右の車輪が逆相にてバウンド、リバウンドすると、車両の横方向に延在するトーションバー部分が捩じられることにより、アンチロールモーメントを発生し、車両の操縦安定性を確保する。
【0004】
スタビライザの一つとして、トーションバー部分が左右のトーションバー部分に二分割され、左右のトーションバー部分の連結及び非連結がアクチュエータにより制御されるクラッチ式のスタビライザが知られている。例えば、下記の特許文献1には、左右のトーションバー部分の連結を解除してトーションバーを非連結状態に制御することにより、悪路走行時の車両の乗り心地性を向上させることが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開平07-186683号公報
【発明の概要】
【0006】
〔発明が解決しようとする課題〕
クラッチ式のスタビライザが搭載された車両においては、後に詳細に説明するように、スタビライザが連結状態にあるか否かによって、車両のステア特性が変化する。車両のステア特性が変化すると、操舵角と車両の旋回半径との関係が変化する。特に、前側及び後側のスタビライザの両方が非連結状態にある場合には、車両のロール剛性、従って操縦安定性が低下する。そのため、この状況にて障害物との衝突を回避するための自動操舵が行われると、運転者の操舵操作に依存せずに車両の走行方向が変化し、車両の挙動が不安定になり易い。
【0007】
本発明題は、前側及び後側のスタビライザの両方が非連結状態にある状況にて障害物との衝突を回避するための自動操舵が行われることに起因して車両の挙動が不安定になることを防止することができるよう改良された衝突回避支援装置を提供することである。
【0008】
〔課題を解決するための手段及び発明の効果〕
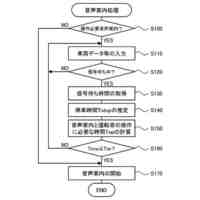
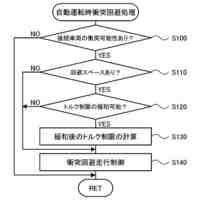
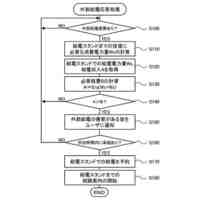
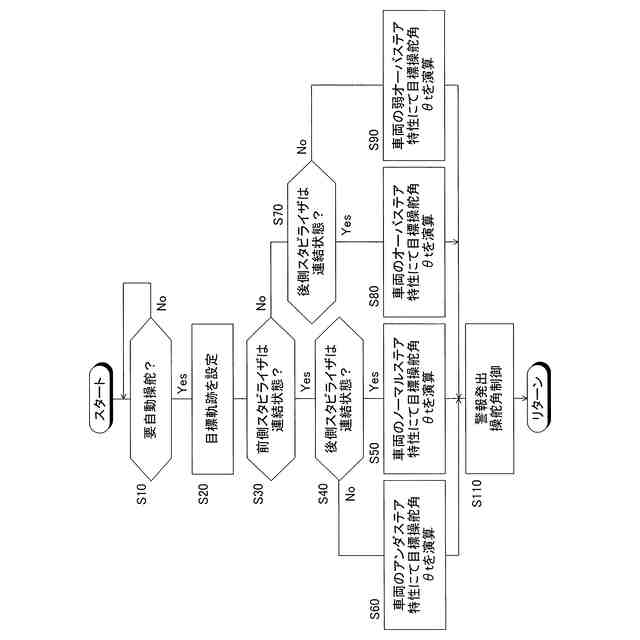
本発明によれば、連結状態及び非連結状態に制御されるクラッチ式の前輪側及び後輪側のスタビライザ(62、64)と、操舵輪(106FL、106FR)を自動的に操舵する自動操舵装置(44)とを備えた車両(102)に適用され、車両の前方の障害物(108)との衝突を回避する必要があると判定したときには(S10)、障害物との衝突を回避するための目標軌跡(110)に沿って車両を走行させるための目標制御量(目標操舵角θt)を演算し(S20、S50、S60、S80、S90)、目標制御量にて自動操舵装置を制御する(S110)よう構成された制御ユニット(運転支援ECU10)と、を含む衝突回避支援装置(100)が提供される。
【0009】
制御ユニットは、前輪側及び後輪側のスタビライザ(62、64)が非連結状態にあるときには(S30、S70)、車両の前方の障害物との衝突を回避する必要があると判定しても(S10)、自動操舵装置を制御しない(S120)よう構成される。
【0010】
一般に、車両のステア特性は、ロール剛性が前輪寄りに設定されることにより、弱アンダステア特性(ノーマルステア特性)に設定されている。即ち、前輪側のスタビライザによるロール剛性は後輪側のスタビライザによるロール剛性よりも高く設定されている。また、車両の重心は前後輪の中間よりも前輪側にある。従って、前輪側及び後輪側のスタビライザが非連結状態になると、前輪側及び後輪側のスタビライザが連結状態にあるときに比して、ロール剛性が後輪寄りに変化し、車両のステア特性は弱オーバステア特性に変化すると考えられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
固定子
3日前
トヨタ自動車株式会社
加熱器
2日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
ケース
4日前
トヨタ自動車株式会社
回転子
9日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
電解液
9日前
トヨタ自動車株式会社
監視装置
3日前
トヨタ自動車株式会社
塗工装置
3日前
トヨタ自動車株式会社
電源装置
9日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
バッテリ
3日前
トヨタ自動車株式会社
切断装置
9日前
トヨタ自動車株式会社
路側装置
4日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電セル
9日前
トヨタ自動車株式会社
バッテリ
3日前
トヨタ自動車株式会社
製造装置
3日前
トヨタ自動車株式会社
車両構造
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
車載装置
2日前
トヨタ自動車株式会社
ロボット
5日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ