TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147000
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2025129090,2024087001
出願日
2025-08-01,2021-10-06
発明の名称
情報処理装置、方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
代理人
個人
,
個人
主分類
G01C
21/30 20060101AFI20250926BHJP(測定;試験)
要約
【課題】地図データと計測データとの照合を好適に実行可能な情報処理装置を提供する。
【解決手段】情報処理装置は、点群地図データ取得手段と、スキャンデータ取得手段と、スキャンデータ処理手段と、照合手段とを有する。点群地図データ取得手段は、反射強度の情報が閾値以上の点群データである点群地図データを取得する。スキャンデータ取得手段は、出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得する。スキャンデータ処理手段は、スキャンデータから、反射強度が所定の閾値以上となる高反射強度スキャンデータを生成する。照合手段は、点群地図データと高反射強度スキャンデータとの照合を行う。
【選択図】図3
特許請求の範囲
【請求項1】
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得する点群地図データ取得手段と、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得するスキャンデータ取得手段と、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成するスキャンデータ処理手段と、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う照合手段と、
を有する情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記照合手段は、Point to Pointアルゴリズムに基づき前記第2照合を行う、請求項1に記載の情報処理装置。
【請求項3】
前記照合手段は、Point to Planeアルゴリズムに基づき前記第1照合を行い、Point to Pointアルゴリズムに基づき前記第2照合を行う、請求項1または2に記載の情報処理装置。
【請求項4】
前記照合手段は、前記第1照合において照合する前記3次元空間スキャンデータの数と、前記第2照合において照合する前記高反射強度スキャンデータの点の数とに基づき、前記第1照合と前記第2照合との重み付けを行う、請求項1~3のいずれか一項に記載の情報処理装置。
【請求項5】
前記基準面は、道路面を含む、請求項1~4のいずれか一項に記載の情報処理装置。
【請求項6】
前記スキャンデータ取得手段は、出射した光の反射光を受光する外界センサにより計測した前記スキャンデータを取得する、請求項1~5のいずれか一項に記載の情報処理装置。
【請求項7】
前記照合手段は、前記照合により、前記スキャンデータの座標系を前記高反射強度地図データの座標系に変換するためのパラメータを算出する、請求項1~6のいずれか一項に記載の情報処理装置。
【請求項8】
前記スキャンデータ処理手段は、前記閾値を、前記スキャンデータの反射強度を対象としたヒストグラムに基づき設定する、請求項1~7のいずれか一項に記載の情報処理装置。
【請求項9】
コンピュータが実行する方法であって、
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得し、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得し、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成し、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う、方法。
【請求項10】
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得し、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得し、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成し、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う処理をコンピュータに実行させるプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の姿勢の推定技術に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来から、レーダやカメラなどの計測部の計測データに基づいて、自車位置推定などを行う技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、非特許文献1には、ICP(Iterative Closest Point)による照合(マッチング)であって、ICPの異なる2つのアルゴリズムであるPoint to PointアルゴリズムとPoint to Planeアルゴリズムとを組み合わせた位置推定手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
【非特許文献】
【0004】
S.Takai, H.Date, S.Kanai, Y.Niina, K.Oda, and T. Ikeda: Accurate registration of MMS point clouds of urban areas using trajectory, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-5/W2, pp. 277-282. 2013.
【発明の概要】
【発明が解決しようとする課題】
【0005】
計測データを取得する場所に特徴的な3次元構造を持つ物体が数多く存在しない環境では、取得された計測データの中にマッチングを安定的に行うための特徴的な形状情報が少なくなり、高い精度で地図データと計測データとの照合(マッチング)を行うことが難しくなる。その結果、自車等の位置・姿勢推定処理に位置や方位の誤差が生じるという課題がある。
【0006】
本開示は、上記のような課題を解決するためになされたものであり、地図データと計測データとの照合を好適に実行可能な情報処理装置を提供することを主な目的とする。
【課題を解決するための手段】
【0007】
請求項に記載の発明は、
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得する点群地図データ取得手段と、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得するスキャンデータ取得手段と、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成するスキャンデータ処理手段と、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う照合手段と、
を有する情報処理装置である。
【0008】
また、請求項に記載の発明は、
コンピュータが実行する方法であって、
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得し、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得し、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成し、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う、制御方法である。
【0009】
また、請求項に記載の発明は、
反射強度が閾値以上となる基準面上の点を表す点群データである高反射強度地図データと、3次元空間に存在する地物の点群データである3次元空間地図データと、を取得し、
出射した光の反射光を受光することで計測した点群データであるスキャンデータを取得し、
前記スキャンデータから、反射強度が所定の閾値以上となる基準面上の点を表すデータを、高反射強度スキャンデータとして生成し、前記スキャンデータ又は当該スキャンデータに対してフィルタを適用したデータを、3次元空間スキャンデータとして生成し、
前記3次元空間地図データと前記3次元空間スキャンデータとの第1照合と、前記高反射強度地図データと前記高反射強度スキャンデータとの第2照合とを行う処理をコンピュータに実行させるプログラムである。
【図面の簡単な説明】
【0010】
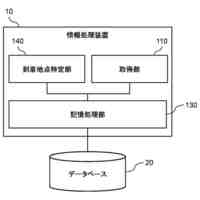
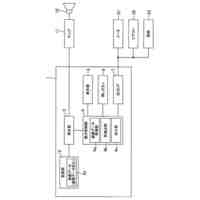
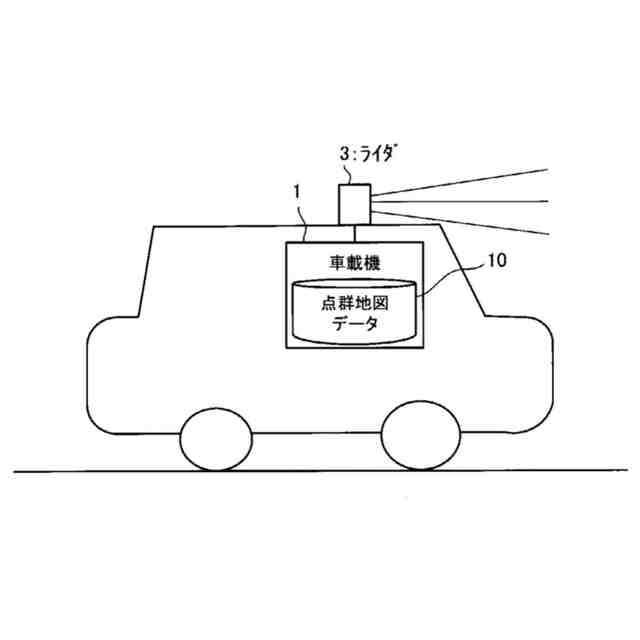
運転支援システムの概略構成図である。
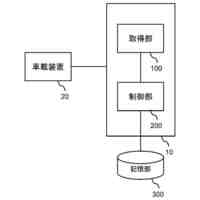
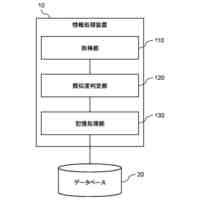
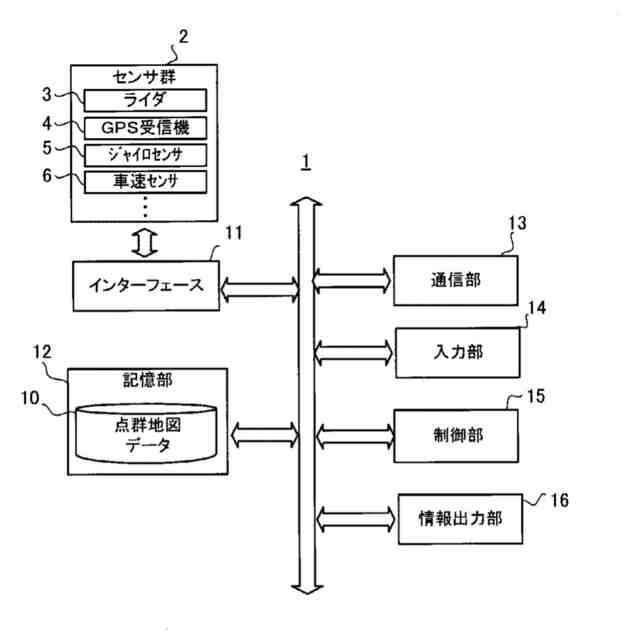
車載機の機能的構成を示すブロック図である。
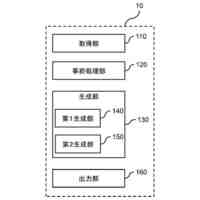
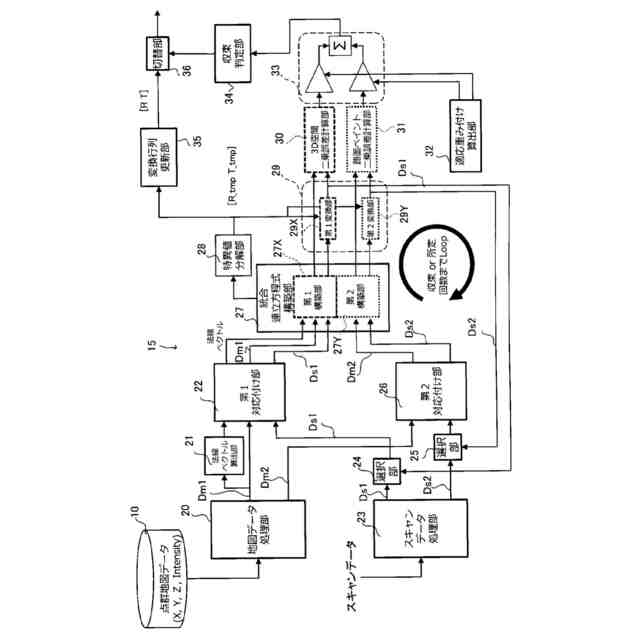
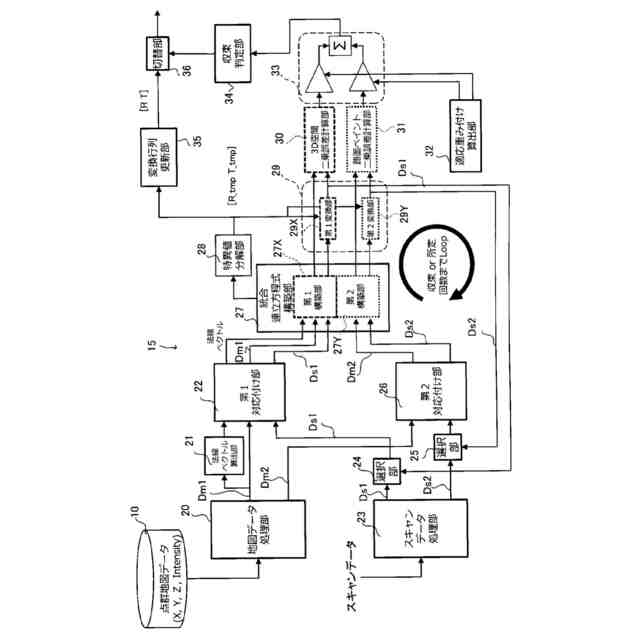
位置推定に関する制御部の機能的なブロック構成図の一例である。
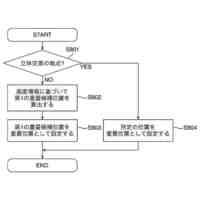
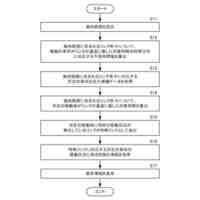
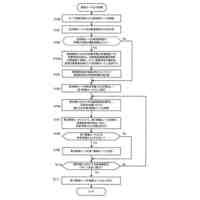
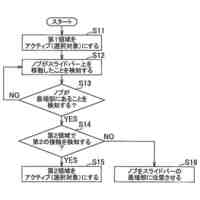
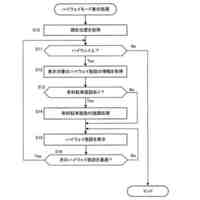
位置推定処理の手順を示すフローチャートの一例である。
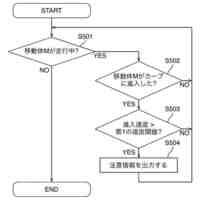
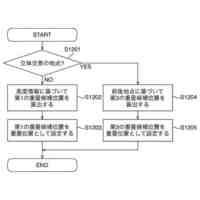
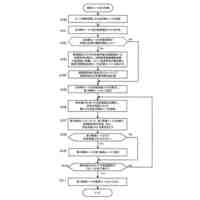
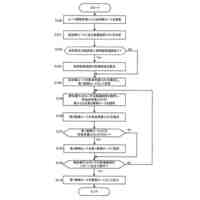
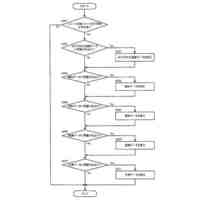
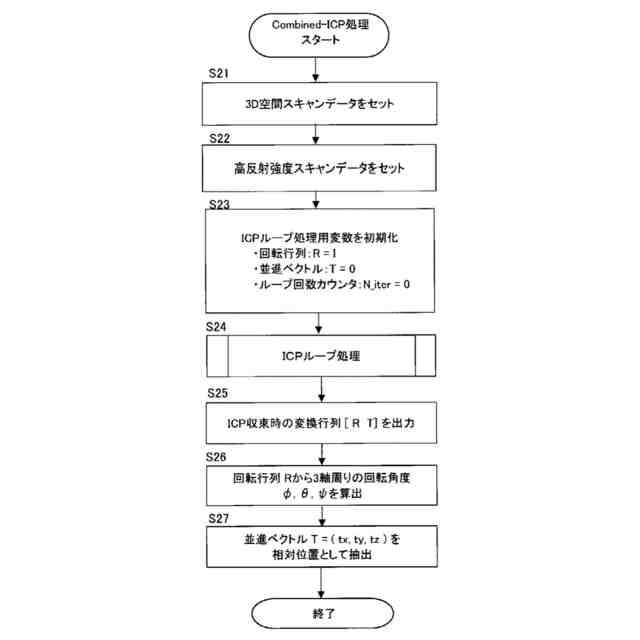
Combined-ICP処理の手順を示すフローチャートの一例である。
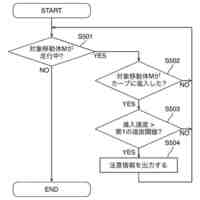
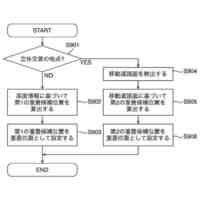
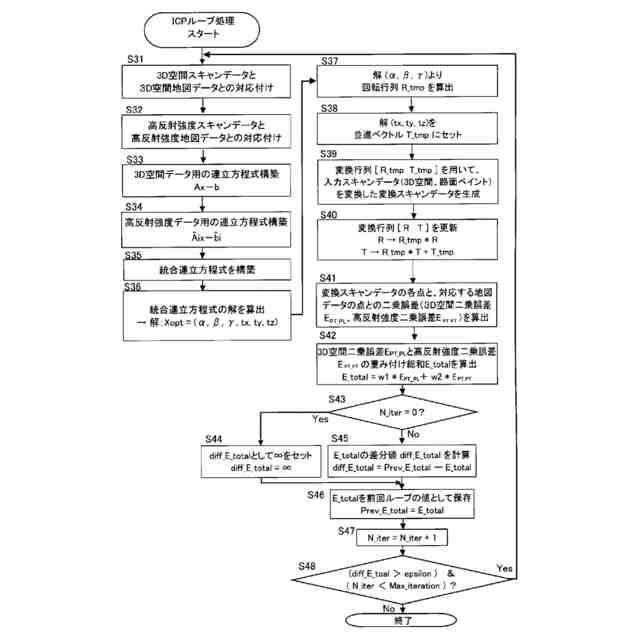
ICPループ処理の手順を示すフローチャートの一例である。
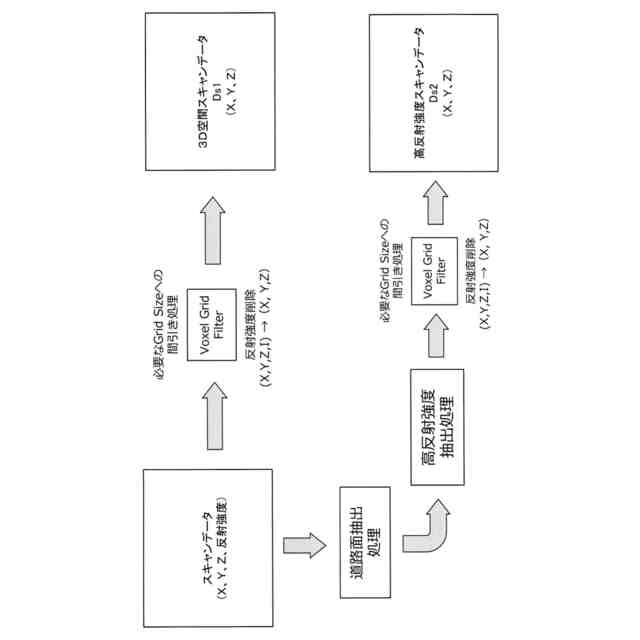
スキャンデータ処理の概要を示す図である。
反射強度閾値の設定に用いられるヒストグラムの一例である。
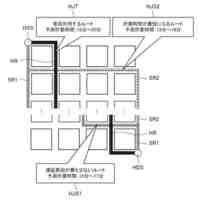
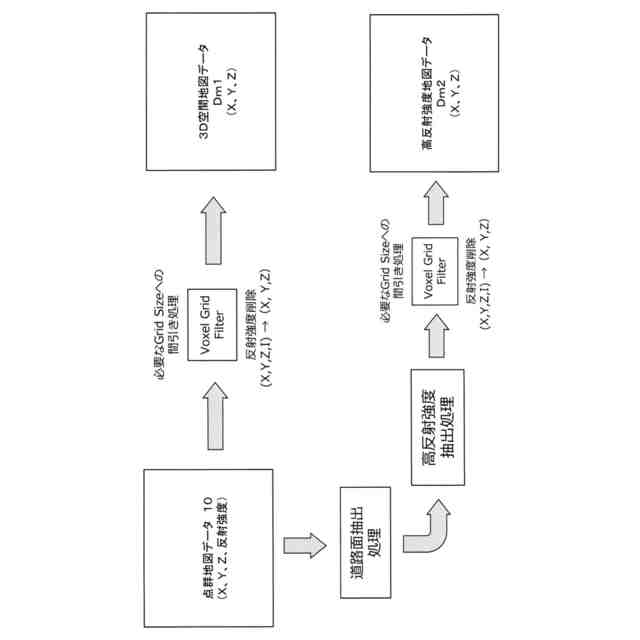
地図データ処理の概要を示す図である。
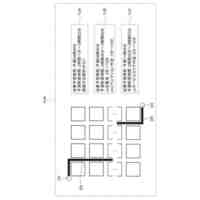
シミュレーションにおいて使用する点群地図データの各点を3次元空間にプロットした状態を表す斜視図である。
比較例におけるマッチング結果を示す図である。
本実施例に基づくマッチング手法によるマッチング結果を示す図である。
第2マッチングの結果を個別に示した図である。
実施例の手法と、比較例の手法とを実行した場合の、ICPループ処理の反復回数と二乗誤差との関係を示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
通信装置
10日前
パイオニア株式会社
通信装置
10日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
情報処理装置
7日前
パイオニア株式会社
ルームミラー装置
7日前
パイオニア株式会社
ルームミラー装置
7日前
パイオニア株式会社
通信装置、ヘルメット
10日前
パイオニア株式会社
検索装置、検索方法、及びプログラム
7日前
パイオニア株式会社
制御装置、制御方法、及びプログラム
7日前
パイオニア株式会社
情報処理装置、情報処理方法、及びプログラム
7日前
パイオニア株式会社
情報処理装置、情報処理方法、及びプログラム
7日前
パイオニア株式会社
車両監視装置、車両監視方法、及びプログラム
7日前
パイオニア株式会社
車両監視装置、車両監視方法、及びプログラム
3日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
7日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
7日前
パイオニア株式会社
経路探索装置、経路探索方法、プログラム及び記憶媒体
7日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
10日前
パイオニア株式会社
判定装置
27日前
パイオニア株式会社
入力装置
3日前
パイオニア株式会社
取付機構
1か月前
パイオニア株式会社
サーバ装置
1か月前
パイオニア株式会社
ライダ装置
25日前
パイオニア株式会社
表示制御装置
7日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報処理装置
27日前
パイオニア株式会社
表示制御装置
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ