TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145249
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045332
出願日
2024-03-21
発明の名称
処理システム、処理装置、処理方法、処理プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
G01S
7/497 20060101AFI20250926BHJP(測定;試験)
要約
【課題】複数の光学センサ間におけるキャリブレーションの精度を確保する処理システムの提供。
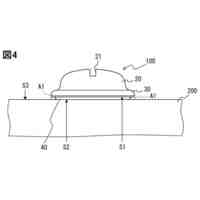
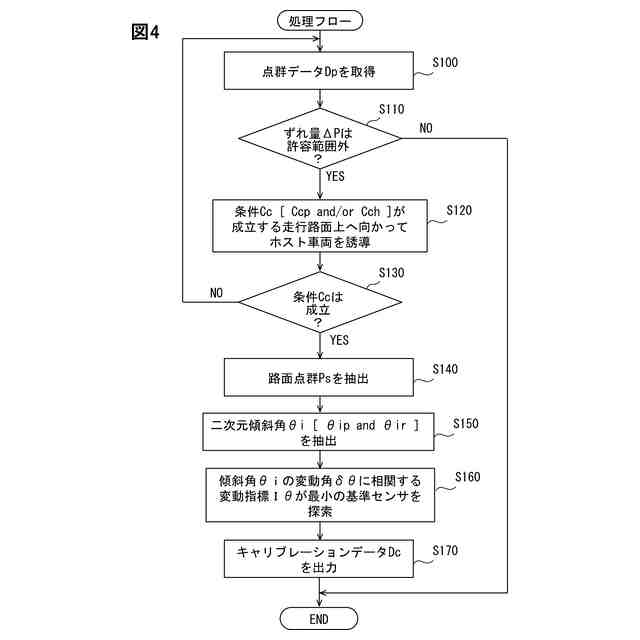
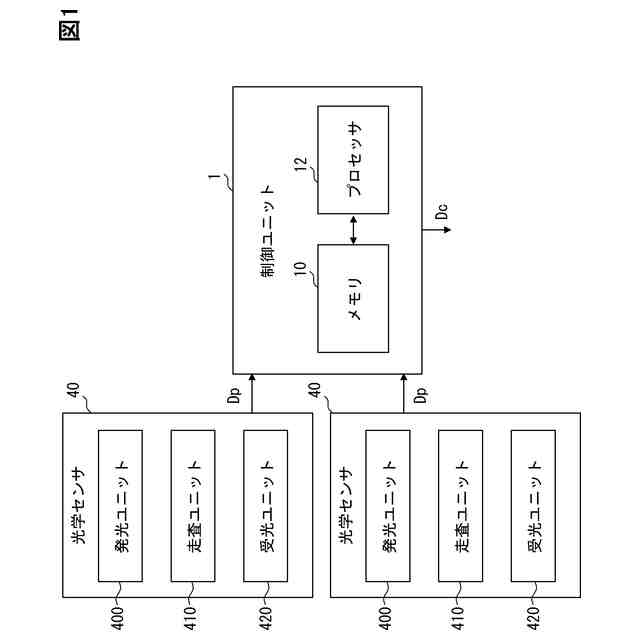
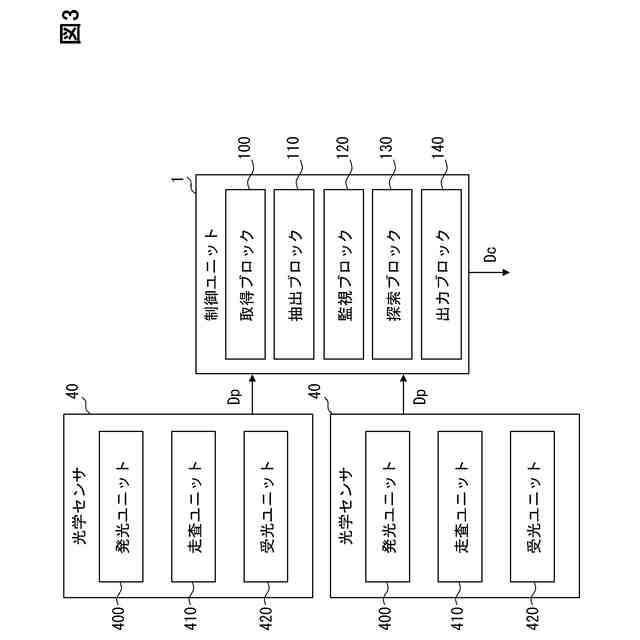
【解決手段】処理装置のプロセッサは、各光学センサによる走査点群を表す点群データDpを、取得することと、各光学センサ別の点群データDpにおいて走行路面を走査した路面点群Psを抽出することと、ホスト車両の左右方向及び前後方向に沿って定義される基準水平面に対して、各光学センサ別の路面点群を近似した近似平面が傾斜する傾斜角θiを監視することと、傾斜角θiに生じた変動角δθに追従して増大する変動指標Iθが最小となる基準センサを探索することと、基準センサ以外となる他の光学センサの点群データDpにおける走査点群の走査位置を、基準センサの点群データDpにおける走査点群の走査位置を基準にキャリブレーションするキャリブレーションデータDcを出力することとを、実行するように構成される。
【選択図】図4
特許請求の範囲
【請求項1】
プロセッサ(12)を有し、ホスト移動体(2)に搭載されて外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするための処理システムであって、
前記プロセッサは、
各前記光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
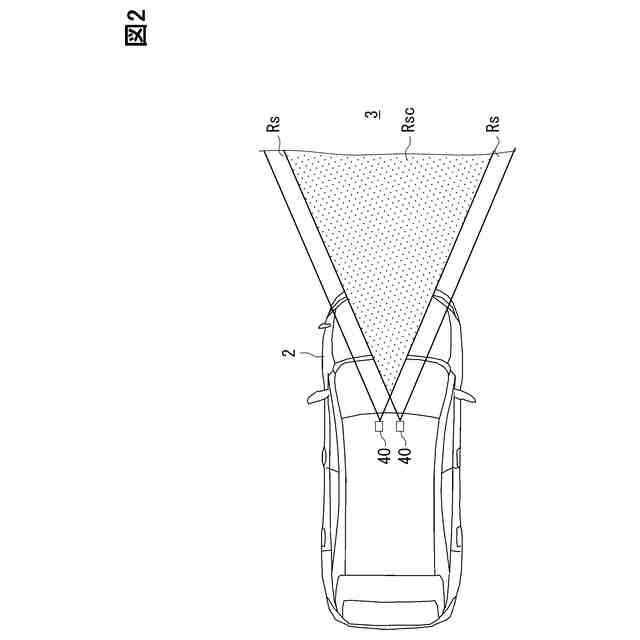
各前記光学センサ別の前記点群データにおいて、前記ホスト移動体の走行する走行路面(3)を走査した前記走査点群を、路面点群(Ps)として抽出することと、
前記ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各前記光学センサ別の前記路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各前記光学センサのうち、前記傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる前記光学センサを、基準センサ(40a)として探索することと、
各前記光学センサのうち、前記基準センサ以外となる他の前記光学センサの前記点群データにおける前記走査点群の前記走査位置を、前記基準センサの前記点群データにおける前記走査点群の前記走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、実行するように構成される処理システム。
続きを表示(約 1,700 文字)
【請求項2】
前記傾斜角を監視することは、
前記走行路面の平面度が、許容される平面上限値までの平面許容範囲内となる場合における前記傾斜角を監視することを、含む請求項1に記載の処理システム。
【請求項3】
前記傾斜角を監視することは、
少なくとも一つの前記光学センサによる前記路面点群の前記走査位置と前記近似平面との離間距離に基づく前記平面度が、前記平面許容範囲内となる場合における前記傾斜角を監視することを、含む請求項2に記載の処理システム。
【請求項4】
前記傾斜角を監視することは、
前記走行路面の水平度が、許容される水平上限値までの水平許容範囲内となる場合における前記傾斜角を監視することを、含む請求項1に記載の処理システム。
【請求項5】
前記傾斜角を監視することは、
少なくとも一つの前記光学センサによる前記路面点群の前記走査位置を近似した前記近似平面の前記水平度が、前記水平許容範囲内となる場合における前記傾斜角を監視することを、含む請求項4に記載の処理システム。
【請求項6】
前記キャリブレーションデータを出力することは、
各前記光学センサの前記点群データにおいて前記走査点群の前記走査位置間でのずれ量(ΔP)がずれ許容範囲外まで上昇した場合に、マッチングした前記走査位置同士でのキャリブレーションを遂行することを、含む請求項1に記載の処理システム。
【請求項7】
前記キャリブレーションデータを出力することは、
前記ホスト移動体の自動運転モード中に取得された、各前記光学センサの前記点群データにおいて前記走査点群の前記走査位置間での前記ずれ量が前記ずれ許容範囲外まで上昇した場合に、マッチングした前記走査位置同士でのキャリブレーションを遂行することを、含む請求項6に記載の処理システム。
【請求項8】
前記基準センサを探索することは、
前記左右方向の左右軸(Op)まわりにおける前記傾斜角(θip)と、前記前後方向の前後軸(Or)まわりにおける前記傾斜角(θir)とに、それぞれ生じた前記変動角の二乗和に相関する前記変動指標が最小の前記基準センサを探索することを、含む請求項1~7のいずれか一項に記載の処理システム。
【請求項9】
前記基準センサを探索することは、
前記基準水平面に対して、前記左右方向の左右軸(Op)まわりにおける傾斜と前記前後方向の前後軸(Or)まわりにおける傾斜との、合成よる前記傾斜角の前記変動角と一致する前記変動指標が最小の前記基準センサを探索することを、含む請求項1~7のいずれか一項に記載の処理システム。
【請求項10】
プロセッサ(12)を有し、ホスト移動体(2)に搭載可能に構成され、前記ホスト移動体の外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするための処理装置であって、
前記プロセッサは、
各前記光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
各前記光学センサ別の前記点群データにおいて、前記ホスト移動体の走行する走行路面(3)を走査した前記走査点群を、路面点群(Ps)として抽出することと、
前記ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各前記光学センサ別の前記路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各前記光学センサのうち、前記傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる前記光学センサを、基準センサ(40a)として探索することと、
各前記光学センサのうち、前記基準センサ以外となる他の前記光学センサの前記点群データにおける前記走査点群の前記走査位置を、前記基準センサの前記点群データにおける前記走査点群の前記走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、実行するように構成される処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体に搭載されて外界を走査する複数の光学センサに対する処理技術に、関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1は、移動体としての車両に複数搭載されるセンサとして、光学センサであるLiDARを利用した技術を、開示している。
【先行技術文献】
【特許文献】
【0003】
米国第10099630号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、車両から外界を走査する各LiDAR間では、例えば車両振動や経年劣化等に起因して、それぞれの走査位置にずれが生じる。そのために各LiDAR間では、走査位置をキャリブレーションするための精度が、重要となる。
【0005】
本開示の課題は、複数の光学センサ間におけるキャリブレーションの精度を確保する処理システムを、提供することにある。本開示の別の課題は、複数の光学センサ間におけるキャリブレーションの精度を確保する処理装置を、提供することにある。本開示のまた別の課題は、複数の光学センサ間におけるキャリブレーションの精度を確保する処理方法を、提供することにある。本開示のさらに別の課題は、複数の光学センサ間におけるキャリブレーションの精度を確保する処理プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、
プロセッサ(12)を有し、ホスト移動体(2)に搭載されて外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするための処理システムであって、
プロセッサは、
各光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
各光学センサ別の点群データにおいて、ホスト移動体の走行する走行路面(3)を走査した走査点群を、路面点群(Ps)として抽出することと、
ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各光学センサ別の路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各光学センサのうち、傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる光学センサを、基準センサ(40a)として探索することと、
各光学センサのうち、基準センサ以外となる他の光学センサの点群データにおける走査点群の走査位置を、基準センサの点群データにおける走査点群の走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、実行するように構成される。
【0008】
本開示の第二態様は、
プロセッサ(12)を有し、ホスト移動体(2)に搭載可能に構成され、ホスト移動体の外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするための処理装置であって、
プロセッサは、
各光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
各光学センサ別の点群データにおいて、ホスト移動体の走行する走行路面(3)を走査した走査点群を、路面点群(Ps)として抽出することと、
ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各光学センサ別の路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各光学センサのうち、傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる光学センサを、基準センサ(40a)として探索することと、
各光学センサのうち、基準センサ以外となる他の光学センサの点群データにおける走査点群の走査位置を、基準センサの点群データにおける走査点群の走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、実行するように構成される。
【0009】
本開示の第三態様は、
ホスト移動体(2)に搭載されて外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするために、プロセッサ(12)により実行される処理方法であって、
各光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
各光学センサ別の点群データにおいて、ホスト移動体の走行する走行路面(3)を走査した走査点群を、路面点群(Ps)として抽出することと、
ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各光学センサ別の路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各光学センサのうち、傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる光学センサを、基準センサ(40a)として探索することと、
各光学センサのうち、基準センサ以外となる他の光学センサの点群データにおける走査点群の走査位置を、基準センサの点群データにおける走査点群の走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、含む。
【0010】
本開示の第四態様は、
ホスト移動体(2)に搭載されて外界を走査する複数の光学センサ(40)間での走査位置をキャリブレーションするために記憶媒体(10)に記憶され、当該キャリブレーションをプロセッサ(12)に実行させるための命令を含む処理プログラムであって、
各光学センサによる走査点群を表す点群データ(Dp)を、取得することと、
各光学センサ別の点群データにおいて、ホスト移動体の走行する走行路面(3)を走査した走査点群を、路面点群(Ps)として抽出することと、
ホスト移動体の左右方向及び前後方向に沿って定義される基準水平面(20)に対して、各光学センサ別の路面点群を近似した近似平面(30)が傾斜する傾斜角(θi,θip,θir)を監視することと、
各光学センサのうち、傾斜角に生じた変動角(δθ)に追従して増大する変動指標(Iθ)が最小となる光学センサを、基準センサ(40a)として探索することと、
各光学センサのうち、基準センサ以外となる他の光学センサの点群データにおける走査点群の走査位置を、基準センサの点群データにおける走査点群の走査位置を基準にキャリブレーションするキャリブレーションデータ(Dc)を出力することとを、実行させるための命令を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
車載器
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ねじ部材
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
電子装置
5日前
株式会社デンソーエレクトロニクス
発音装置
5日前
株式会社デンソー
レーダ装置
5日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
電子制御装置
5日前
株式会社デンソー
電波吸収装置
5日前
株式会社デンソー
電力変換装置
1日前
株式会社デンソーエアクール
換気空調装置
2日前
株式会社デンソー
通信システム
5日前
株式会社デンソー
電気化学セル
5日前
株式会社デンソー
電子制御装置
1日前
株式会社デンソーテン
車載映像装置
1日前
株式会社デンソー
圧着ヘッド装置
1日前
株式会社デンソー
移動体制御装置
2日前
株式会社デンソー
画像符号化装置
3日前
株式会社デンソー
自己位置推定装置
1日前
株式会社デンソートリム
エンジン制御装置
1日前
株式会社デンソーウェーブ
光学読取システム
2日前
株式会社デンソーエレクトロニクス
車両用音出力装置
3日前
株式会社デンソーウェーブ
ロボットの操作装置
3日前
株式会社デンソーウェーブ
ロボットの操作装置
3日前
株式会社デンソー
巻線界磁型回転電機
5日前
株式会社デンソー
巻線界磁型回転電機
5日前
株式会社デンソー
巻線界磁型回転電機
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
株式会社デンソーウェーブ
ロボットの操作装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ