TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025142554
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041981
出願日
2024-03-18
発明の名称
測定制御システム、プログラムおよび試料測定方法
出願人
住友金属鉱山株式会社
代理人
個人
,
個人
主分類
G01N
35/00 20060101AFI20250924BHJP(測定;試験)
要約
【課題】測定装置で行う試料の測定について、作業負荷の軽減を図りつつ、実施頻度が異なる複数種類の情報処理作業を経る場合でもそれぞれの関連性が失われることなく効率的に行うことを可能にする技術を提供する。
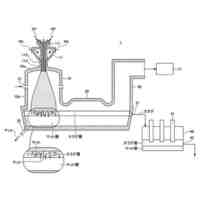
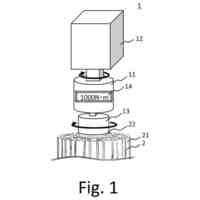
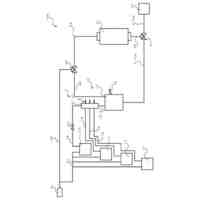
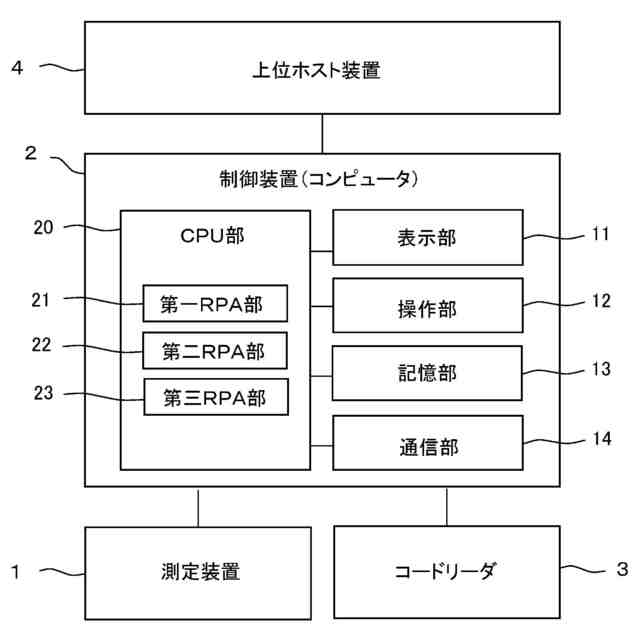
【解決手段】試料についての測定を行う測定装置1に対して当該測定に必要となる基準情報の特定を当該測定に先立って行う第一RPAソフトウエアロボット21と、前記測定装置1に対して当該測定装置1での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を行う第二RPAソフトウエアロボット22と、前記測定装置1による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を行う第三RPAソフトウエアロボット23と、を備え、前記第一RPAソフトウエアロボット21、前記第二RPAソフトウエアロボット22および前記第三RPAソフトウエアロボット23が、それぞれに共通に設定される変数を用いて連携するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
試料についての測定を行う測定装置に対して当該測定に必要となる基準情報の特定を当該測定に先立って行う第一RPAソフトウエアロボットと、
前記測定装置に対して当該測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を行う第二RPAソフトウエアロボットと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を行う第三RPAソフトウエアロボットと、を備え、
前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットが、それぞれに共通に設定される変数を用いて連携するように構成される
測定制御システム。
続きを表示(約 1,300 文字)
【請求項2】
前記測定装置は、誘導結合プラズマ発光分光分析装置であり、
前記基準情報は、前記誘導結合プラズマ発光分光分析装置での測定に必要となる検量線を特定するための標準液に関する情報であり、
前記変数は、少なくとも前記標準液に関する情報についての変数を含む
請求項1に記載の測定制御システム。
【請求項3】
前記シーケンスに関する情報は、測定対象となる試料に応じた繰り返し測定処理の手順を規定するように構成されている
請求項1または2に記載の測定制御システム。
【請求項4】
前記シーケンスに関する情報は、前記基準情報毎に用意されたシーケンス雛形に基づくものである
請求項3に記載の測定制御システム。
【請求項5】
前記試料を収容する容器に付されたコード情報を読み取るコードリーダを備え、
前記測定装置が測定対象とする試料と、前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットの少なくともいずれかによる特定情報との対応付けを、当該試料について前記コードリーダが読み取ったコード情報を基に行うように構成されている
請求項1に記載の測定制御システム。
【請求項6】
試料についての測定を行う測定装置と接続するコンピュータに、
前記測定装置に対して当該測定装置での測定に必要となる基準情報の特定を当該測定に先立って行う第一RPAソフトウエアロボットとして機能させるステップと、
前記測定装置に対して当該測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を行う第二RPAソフトウエアロボットとして機能させるステップと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を行う第三RPAソフトウエアロボットとして機能させるステップと、を実行させ、
各ステップでは、前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットを、それぞれに共通に設定される変数を用いて連携させる
プログラム。
【請求項7】
試料についての測定を行う測定装置に対して、
前記測定装置での測定に必要となる基準情報の特定を当該測定に先立って第一RPAソフトウエアロボットによって行うステップと、
前記測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を第二RPAソフトウエアロボットによって行うステップと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を第三RPAソフトウエアロボットによって行うステップと、を含み、
各ステップでは、前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットを、それぞれに共通に設定される変数を用いて連携させる
試料測定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測定制御システム、プログラムおよび試料測定方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
試料中に含まれる元素の分析には、例えば、誘導結合プラズマ発光分光分析法(ICP-AESまたはICP-OES)による測定結果が用いられることがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-17836号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ICP-AES等の測定を行う場合には、その測定を行う測定装置および当該測定装置に接続するコンピュータ装置において、各種の情報処理作業を行う必要がある。具体的には、情報処理作業として、例えば、測定装置での測定に必要となる基準情報(例えば、検量線等に関する情報)の特定、測定のシーケンスに関する情報(例えば、測定処理手順や測定処理内容等に関する情報)の特定、測定結果について解析可能な情報態様への変換(例えば、解析用データの生成)等、が挙げられる。
【0005】
各種の情報処理作業については、これらの全てを人手に委ねると、作業者への作業負荷が高いことから、ヒューマンエラーが生じ易く、測定の効率悪化(生産性低下)にも繋がり得る。そこで、これらの情報処理作業について、例えばRPA(Robotic Process Automation)を利用して自動化することも考えられる。
【0006】
ところが、測定装置での測定の開始から終了までには複数種類の情報処理作業が必要であるところ、それぞれの実施頻度が互いに異なり、また頻度自体も測定条件等に応じて変わり得る。そのため、各種の情報処理作業について、それぞれの頻度の違い等を踏まえると、これらを測定に必要な一連の処理として纏めて自動化することは、必ずしも容易ではない。また、頻度の違い等を踏まえて情報処理作業毎に別個に自動化することも考えられるが、その場合には各種の情報処理作業の間の関連性が失われてしまい、その結果、測定の開始から終了までを一連の処理について、必ずしも負荷軽減による効率向上(生産性向上)が図れるとは限らない。
【0007】
本開示は、測定装置で行う試料の測定について、作業負荷の軽減を図りつつ、実施頻度が異なる複数種類の情報処理作業を経る場合でもそれぞれの関連性が失われることなく効率的に行うことを可能にする技術を提供する。
【課題を解決するための手段】
【0008】
本開示の一態様によれば、
試料についての測定を行う測定装置に対して当該測定に必要となる基準情報の特定を当該測定に先立って行う第一RPAソフトウエアロボットと、
前記測定装置に対して当該測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を行う第二RPAソフトウエアロボットと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を行う第三RPAソフトウエアロボットと、を備え、
前記第一RPAソフトウエアロボット、前記RPA第二ソフトウエアロボットおよび前記第三RPAソフトウエアロボットが、それぞれに共通に設定される変数を用いて連携するように構成される
測定制御システムが提供される。
【0009】
本開示の他の一態様によれば、
試料についての測定を行う測定装置と接続するコンピュータに、
前記測定装置に対して当該測定装置での測定に必要となる基準情報の特定を当該測定に先立って行う第一RPAソフトウエアロボットとして機能させるステップと、
前記測定装置に対して当該測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を行う第二RPAソフトウエアロボットとして機能させるステップと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を行う第三RPAソフトウエアロボットとして機能させるステップと、を実行させ、
各ステップでは、前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットを、それぞれに共通に設定される変数を用いて連携させる
プログラムが提供される。
【0010】
本開示のさらに他の一態様によれば、
試料についての測定を行う測定装置に対して、
前記測定装置での測定に必要となる基準情報の特定を当該測定に先立って第一RPAソフトウエアロボットによって行うステップと、
前記測定装置での測定の一単位ごとに当該測定のシーケンスに関する情報の特定を第二RPAソフトウエアロボットによって行うステップと、
前記測定装置による測定の終了後のいずれかのタイミングで当該測定の結果に関する情報の所定フォーマットへの転載出力を第三RPAソフトウエアロボットによって行うステップと、を含み、
各ステップでは、前記第一RPAソフトウエアロボット、前記第二RPAソフトウエアロボットおよび前記第三RPAソフトウエアロボットを、それぞれに共通に設定される変数を用いて連携させる
試料測定方法が提供される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友金属鉱山株式会社
銅精鉱の製錬方法
今日
住友金属鉱山株式会社
銅精鉱の製錬方法
今日
住友金属鉱山株式会社
ニッケル粉末の製造方法
今日
住友金属鉱山株式会社
電極棒の連結作業台および電極棒の連結作業方法
今日
住友金属鉱山株式会社
可燃性粉末の反応挙動評価方法及び反応挙動評価装置
今日
住友金属鉱山株式会社
表面弾性波フィルタ用圧電体材料、表面弾性波フィルタ用圧電体基板、表面弾性波フィルタ
6日前
住友金属鉱山株式会社
ニッケル及びコバルト塩水溶液の製造方法、硫酸ニッケル及び硫酸コバルトの製造方法、正極材料の合成のための前駆体化合物の製造方法
4日前
住友金属鉱山株式会社
合金粉末及びその製造方法、並びにニッケル及びコバルト鉱酸塩水溶液の製造方法、硫酸ニッケル及び硫酸コバルトの製造方法、リチウムイオン電池用正極材料の合成のための前駆体化合物を製造する方法
5日前
個人
計量スプーン
28日前
個人
メジャー文具
今日
日本精機株式会社
位置検出装置
6日前
日本精機株式会社
位置検出装置
6日前
日本精機株式会社
位置検出装置
6日前
大和製衡株式会社
組合せ秤
11日前
大和製衡株式会社
組合せ秤
11日前
アズビル株式会社
圧力センサ
5日前
株式会社東芝
センサ
11日前
株式会社東芝
センサ
11日前
株式会社ユーシン
操作検出装置
8日前
エイブリック株式会社
磁気センサ回路
5日前
トヨタ自動車株式会社
検査装置
8日前
ダイハツ工業株式会社
測定用具
1か月前
トヨタ自動車株式会社
表示装置
20日前
TDK株式会社
ガスセンサ
4日前
株式会社ナリス化粧品
角層細胞採取用具
18日前
株式会社ヨコオ
コンタクタ
1か月前
東レエンジニアリング株式会社
計量装置
8日前
個人
粘塑性を用いた有限要素法の定式化
20日前
TDK株式会社
ガスセンサ
5日前
TDK株式会社
磁気センサ
28日前
株式会社東芝
重量測定装置
4日前
三菱マテリアル株式会社
温度センサ
今日
富士電機株式会社
半導体パッケージ
28日前
大同特殊鋼株式会社
超音波探傷方法
28日前
日本碍子株式会社
ガスセンサ
29日前
株式会社関電工
検相器用治具
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ