TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136203
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034485
出願日
2024-03-07
発明の名称
情報処理装置および情報処理方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06Q
50/10 20120101AFI20250911BHJP(計算;計数)
要約
【課題】効率良いロボット派遣サービスの提供を可能とする。
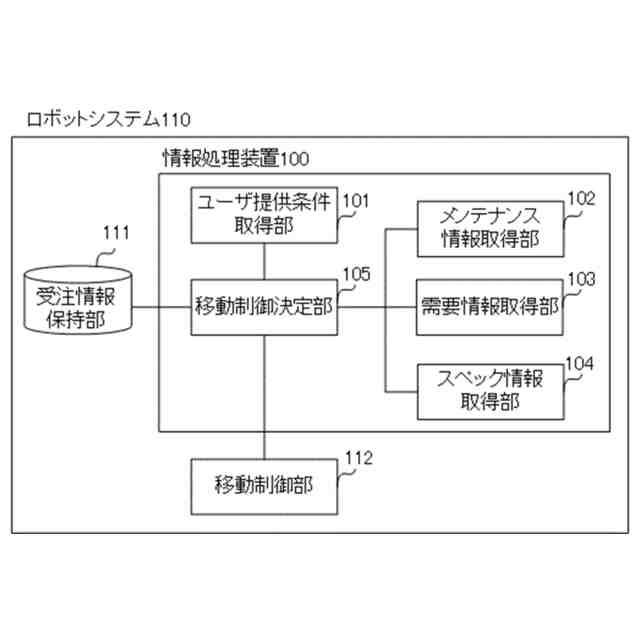
【解決手段】情報処理装置100は、ロボットを複数の場所へ順に移動させてサービスを提供する際にロボットの移動を制御するための処理を行う。該装置は、複数の場所のそれぞれにおいてサービスの提供後または提供前にロボットが待機可能か否かを示す第1の情報を取得する取得手段101と、第1の情報に基づいて、サービスの提供後のロボットの移動に関する決定を行う決定手段105とを有する。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットを複数の場所へ順に移動させてサービスを提供する際に前記ロボットの移動を制御するための処理を行う情報処理装置であって、
前記複数の場所のそれぞれにおいて前記サービスの提供後または提供前に前記ロボットが待機可能か否かを示す第1の情報を取得する取得手段と、
前記第1の情報に基づいて、前記サービスの提供後の前記ロボットの移動に関する決定を行う決定手段とを有することを特徴とする情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記決定手段は、前記サービスの提供後の前記ロボットの移動先を決定することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記決定手段は、前記複数の場所のうち第1の場所での前記サービスの提供後の前記移動先として、前記第1の場所または該第1の場所とは異なる少なくとも1つの場所のうちの第2の場所を決定することを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記ロボットは、待機拠点から前記第1の場所に移動し、
前記決定手段が決定する前記第1の場所での前記サービスの提供後の前記移動先に前記待機拠点が含まれることを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記複数の場所は、第1の場所と第2の場所を含み、
前記決定手段は、前記第1の場所での前記サービスの提供後の前記ロボットを、前記第1の場所での待機後に前記第2の場所へ移動させる又は前記第1の場所での待機なしで前記第2の場所へ移動させて待機させると決定することを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記ロボットは、待機拠点から前記第1の場所に移動し、
前記決定手段の決定に、前記第1の場所での前記サービスの提供後の前記ロボットを前記待機拠点へ移動させることが含まれることを特徴とする請求項5に記載の情報処理装置。
【請求項7】
前記複数の場所はそれぞれ、前記サービスを依頼したユーザが管理する場所であり、
前記取得手段は、前記ユーザにより入力された前記第1の情報を取得することを特徴とする請求項1に記載の情報処理装置。
【請求項8】
前記取得手段は、前記複数の場所のそれぞれにおいて前記ロボットに対するメンテナンスが可能か否かを示す第2の情報をさらに取得し、
前記決定手段は、前記第1の情報と前記第2の情報とに基づいて前記決定を行うことを特徴とする請求項1に記載の情報処理装置。
【請求項9】
前記メンテナンスは、前記ロボットの充電および前記ロボットのクリーニングのうち少なくとも一方を含むことを特徴とする請求項8に記載の情報処理装置。
【請求項10】
前記ロボットに必要なメンテナンスの種類または前記メンテナンスの種類および該メンテナンスの種類ごとの必要度の情報を含むメンテナンス情報を取得するメンテナンス情報取得手段をさらに有し、
前記決定手段は、前記第1の情報と前記第2の情報と前記メンテナンス情報とに基づいて前記決定を行うことを特徴とする請求項8に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット派遣サービスに用いられる情報処理技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ロボットをユーザが指定するサービス提供場所に派遣して各種サービスを提供するRaaS(Robot as a Service)が利用されている。例えば、待機拠点(ステーション)で待機していたロボットをユーザが指定したサービス提供時刻にサービス提供時刻へ移動させてサービスを提供させる。サービス提供が終了すると、次のサービス提供時刻までの間の空き時間においてロボットをステーションに帰投させる。その後、次のサービス提供時刻にロボットをステーションから次のサービス提供場所へ移動させてサービスを提供させる。
【0003】
特許文献1には、RaaSに関するものではないが、仕事をするユーザのスケジュールに関する情報に基づいて、前の仕事の後の空き時間にユーザに次の仕事を行う場所への移動を提案するシステムが開示されている。ロボット派遣サービスにおいても、ロボットを空き時間の間に前のサービス提供場所から次のサービス提供場所に直接移動させることも可能である。
【先行技術文献】
【特許文献】
【0004】
特開2022-50248号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ロボットが空き時間の間に前のサービス提供場所から次のサービス提供場所に直接移動したとしても、ロボットが次のサービス提供場所で次のサービス提供時刻まで待機することが許されない場合がある。このような場合、ロボットはステーションに一旦帰投せざるを得ず、無駄なロボットの移動が発生することになる。
【0006】
本発明は、ロボットの無駄な移動をできるだけ少なくして、効率良いロボット派遣サービスの提供を可能とする情報処理装置等を提供する。
【課題を解決するための手段】
【0007】
本発明の一側面としての情報処理装置は、ロボットを複数の場所へ順に移動させてサービスを提供する際にロボットの移動を制御するための処理を行う。該情報処理装置は、複数の場所のそれぞれにおいてサービスの提供後または提供前にロボットが待機可能か否かを示す第1の情報を取得する取得手段と、第1の情報に基づいて、サービスの提供後のロボットの移動に関する決定を行う決定手段とを有することを特徴とする。なお、上記情報処理装置とロボットとを含むシステムも、本発明の他の一側面を構成する。
【0008】
また本発明の他の一側面としての情報処理方法は、ロボットを複数の場所へ順に移動させてサービスを提供する際にロボットの移動を制御するための処理を行う方法である。該方法は、複数の場所のそれぞれにおいてサービスの提供後または提供前にロボットが待機可能か否かを示す第1の情報を取得する工程と、第1の情報に基づいて、サービスの提供後のロボットの移動に関する決定を行う工程とを有することを特徴とする。なお、上記情報処理方法に従う処理をコンピュータに実行させるプログラムも、本発明の他の一側面を構成する。
【発明の効果】
【0009】
本発明によれば、ロボットの無駄な移動をできるだけ少なくして、効率良いロボット派遣サービスを提供することができる。
【図面の簡単な説明】
【0010】
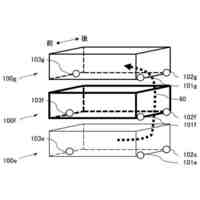
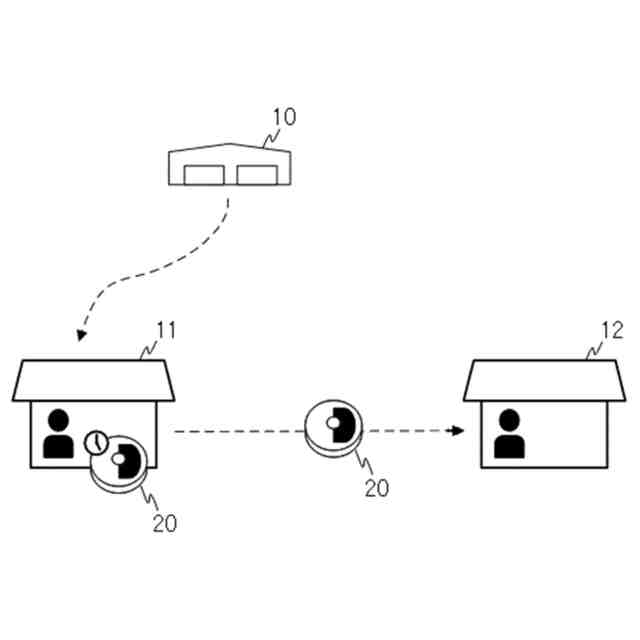
実施例におけるロボットの移動を示す図。
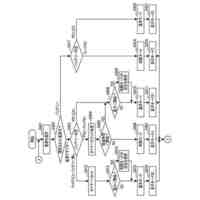
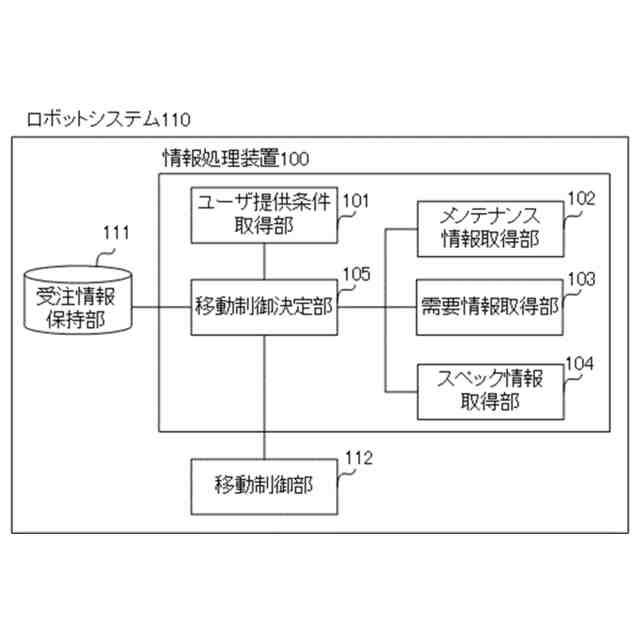
実施例の情報処理装置を含むロボットシステムの構成を示すブロック図。
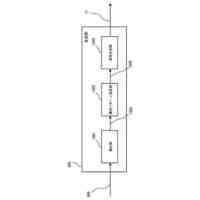
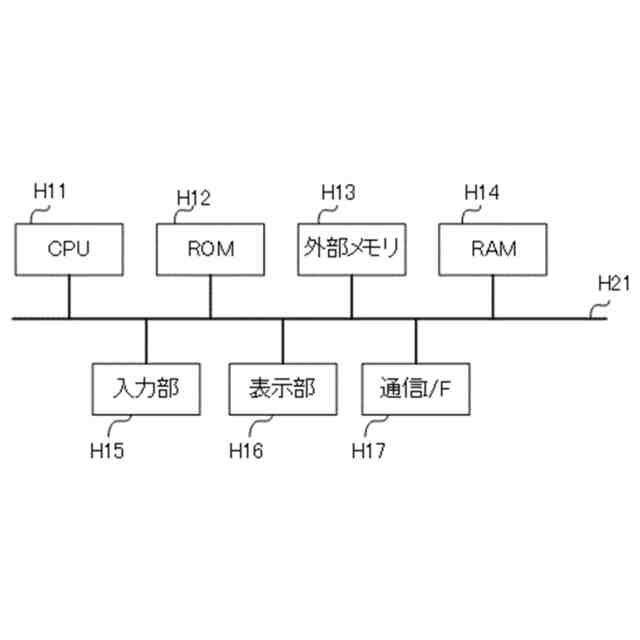
実施例の情報処理装置のハードウェア構成を示す図。
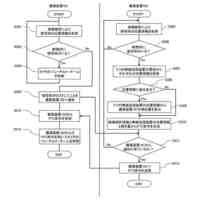
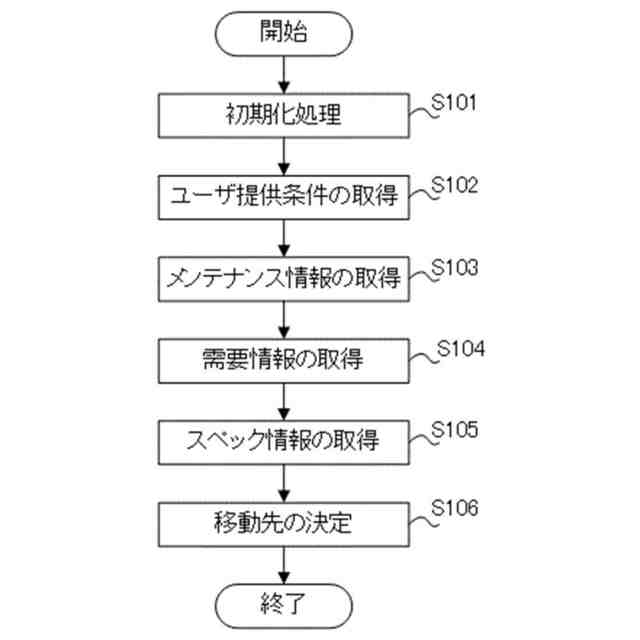
実施例の情報処理装置が実行する処理を示すフローチャート。
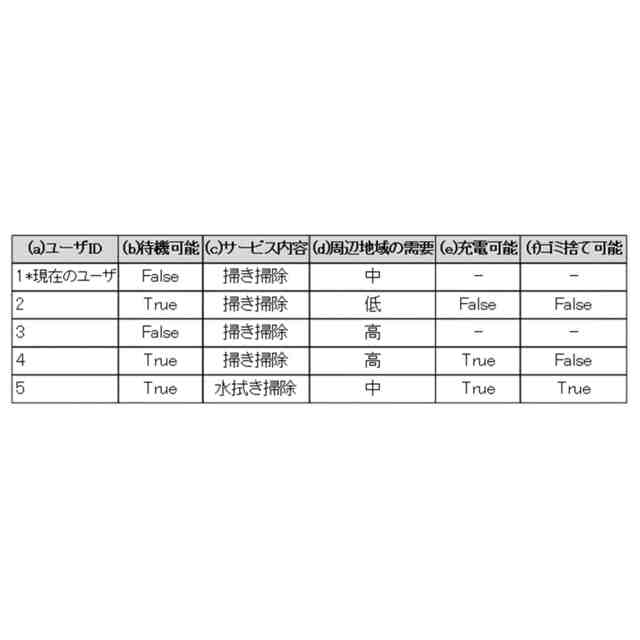
実施例におけるユーザごとのユーザ提供条件を示す表図。
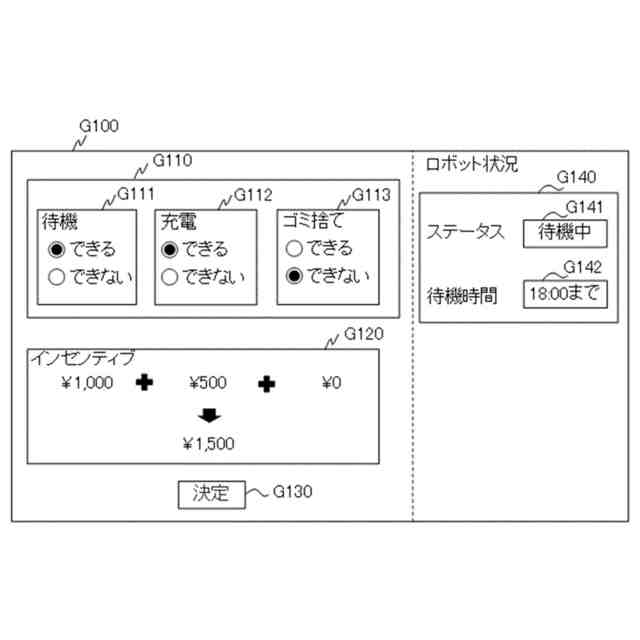
実施例のユーザ用GUIを示す図。
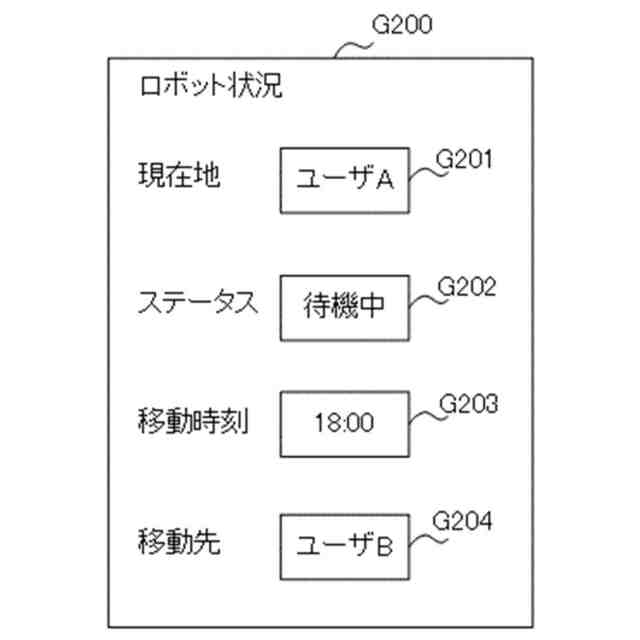
実施例におけるサービス提供者用GUIを示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
光学装置
16日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
記録装置
4日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
電子機器
16日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
記録装置
3日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
電子機器
19日前
キヤノン株式会社
定着装置
11日前
キヤノン株式会社
定着装置
11日前
キヤノン株式会社
定着装置
11日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
画像表示装置
10日前
キヤノン株式会社
配送システム
16日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
撮像システム
4日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
有機発光素子
2日前
キヤノン株式会社
画像記録装置
4日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
光学測定装置
11日前
キヤノン株式会社
光学測定装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ