TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130893
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028261
出願日
2024-02-28
発明の名称
移動装置、移動装置の制御装置、移動装置の制御方法、移動システム、及び移動型作業ロボット
出願人
株式会社テクノ菱和
,
国立研究開発法人情報通信研究機構
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/242 20240101AFI20250902BHJP(制御;調整)
要約
【課題】使用者の設定負担を軽減した移動装置、移動装置の制御装置、移動装置の制御方法、移動システム、及び移動型作業ロボットを提供する。
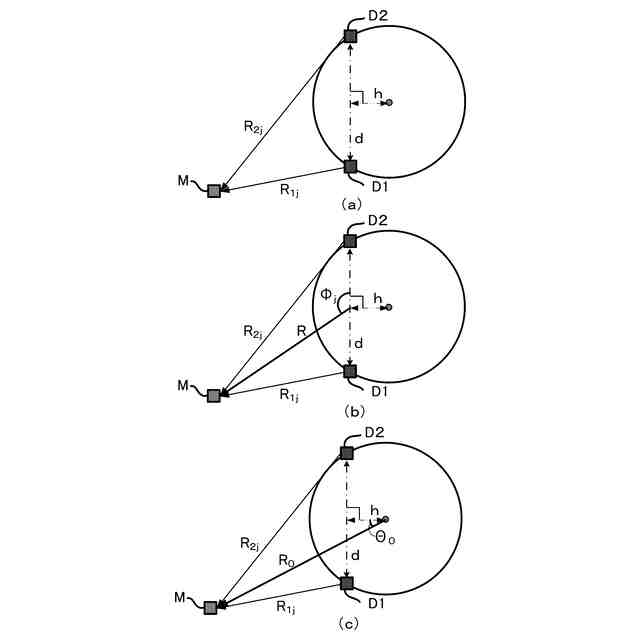
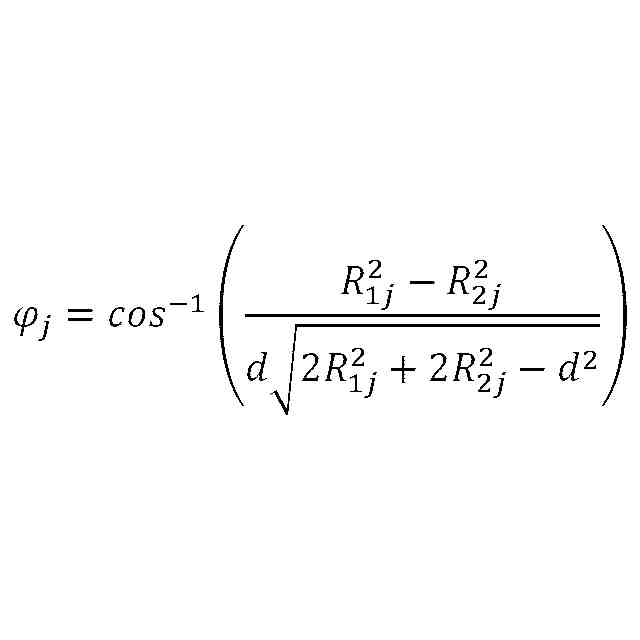
【解決手段】測距部D1及びD2と、装置本体を移動させる移動機構と、制御部と、を有する移動装置であって、測距部D1及びD2と、は、移動装置の回転中心を中心とした同心円上に所定の間隔以上離間して配置され、制御部は、測距部D1と測距装置M間の距離である第1の距離R
1j
を演算する第1の距離演算部と、測距部D2と測距装置M間の距離である第2の距離R
2j
を演算する第2の距離演算部と、測距部D1と測距部D2を結ぶ直線の中点から測距装置Mまでの距離である第3の距離Rを演算する第3の距離演算部と、測距部D1と測距部D2を結ぶ直線の中点から見た測距装置Mの方向角度である第1の方向角度Φ
j
を演算する第1の方向角度演算部と、を有する。
【選択図】図4
特許請求の範囲
【請求項1】
外部の測距装置と通信可能に設けられた第1の測距部及び第2の測距部と、装置本体を移動させる移動機構と、制御部と、を有する移動装置であって、
前記第1の測距部と、前記第2の測距部と、は、前記移動装置の回転中心を中心とした同心円上に所定の間隔以上離間して配置され、
前記制御部は、
前記第1の測距部と前記測距装置間の距離である第1の距離を演算する第1の距離演算部と、
前記第2の測距部と前記測距装置間の距離である第2の距離を演算する第2の距離演算部と、
前記第1の距離及び前記第2の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記測距装置までの距離である第3の距離を演算する第3の距離演算部と、
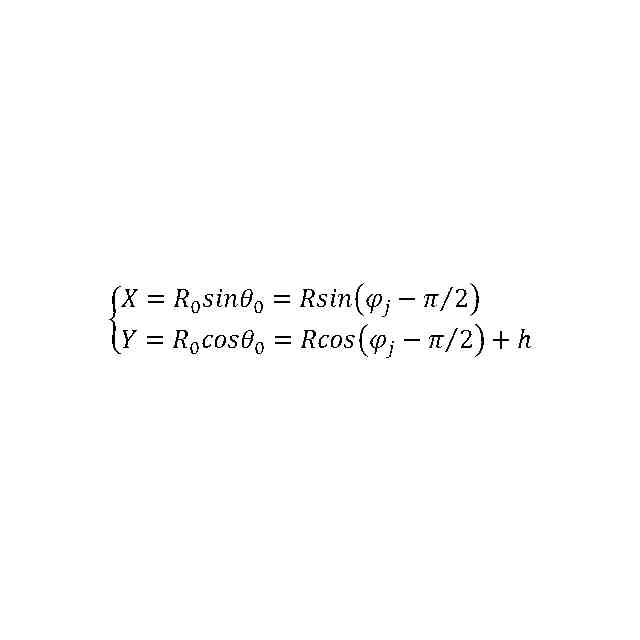
前記第1の距離、前記第2の距離、及び前記第3の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から見た前記測距装置の方向角度である第1の方向角度を演算する第1の方向角度演算部と、
を有する移動装置。
続きを表示(約 3,100 文字)
【請求項2】
前記制御部は、
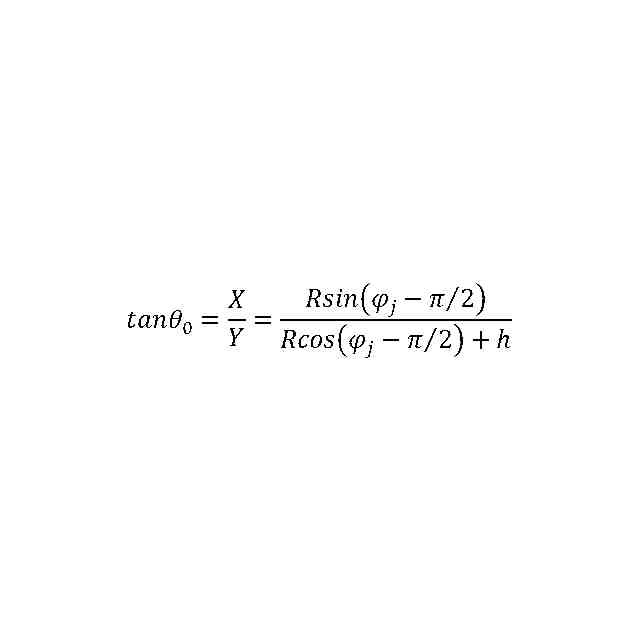
前記第3の距離と、前記第1の方向角度と、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記移動装置の回転中心までの距離と、に基づいて、前記移動装置の回転中心から見た前記測距装置の方向角度である第2の方向角度を演算する第2の方向角度演算部と、
前記第3の距離と、前記第1の方向角度と、前記第2の方向角度に基づいて、前記移動装置の回転中心から前記測距装置までの距離である第4の距離を演算する第4の距離演算部と、
をさらに有する請求項1記載の移動装置。
【請求項3】
前記制御部は、
前記第1の方向角度及び前記第3の距離、又は、前記第2の方向角度及び前記第4の距離、に基づいて、前記移動装置が前記測距装置に至るように前記移動機構の駆動条件を演算する駆動条件演算部、をさらに含む、請求項2記載の移動装置。
【請求項4】
前記制御部は、
前記移動装置が自動走行を開始する前に、前記第1の測距部及び前記第2の測距部と、前記測距装置との間で送信電力の初期値を設定する初期値設定部をさらに含み、
前記初期値設定部は、
前記送信電力の候補値のリストを記憶するリスト記憶部と、
前記送信電力の候補値のリストに基づいて、前記送信電力が小さいものから順に、前記送信電力を設定する候補値設定部と、
前記候補値設定部が設定した前記送信電力おける測距成功率を演算する成功率演算部と、
前記測距成功率が所定のしきい値に達するか否かを判定する判定部と、
前記送信電力の前記初期値を決定する決定部と、を有し、
前記判定部が、前記候補値設定部が設定した前記送信電力における前記測距成功率が前記所定のしきい値に達すると判定した場合、前記決定部は、前記候補値設定部が設定した前記送信電力を前記初期値として決定するよう構成される、
請求項1又は2記載の移動装置。
【請求項5】
前記初期値設定部は、
前記候補値設定部が設定した前記送信電力と、前記候補値設定部が設定した前記送信電力における前記測距成功率と、を紐付けて記憶する成功率記憶部をさらに有し、
前記決定部は、前記成功率記憶部が記憶する前記送信電力と前記測距成功率の組み合わせから、最も測距成功率が高い前記送信電力を前記初期値として決定するよう構成される、
請求項4記載の移動装置。
【請求項6】
前記制御部は、
前記移動装置が前記自動走行を開始した後に、前記第1の測距部及び前記第2の測距部と、前記測距装置との間で前記送信電力の調整値を設定する調整部をさらに含み、
前記調整部は、
前記移動装置が移動しながら得た現在の測距距離と、最大送信電力で送受信するときの前記第1の測距部及び前記第2の測距部と前記測距装置で送受信可能な距離である最大距離と、を比較し、前記送信電力の変更の要否を判定する測距結果判定部と、
前記初期値における初期測距距離と、現在の測距距離の差分を演算する距離差分演算部と、
前記差分と前記移動装置の走行距離を比較する差分判定部と、
前記送信電力の前記調整値を演算する送信電力演算部と、を有し、
前記測距結果判定部が前記現在の測距距離<前記最大距離を満たすと判断した場合、前記距離差分演算部が前記差分を演算し、
かつ、前記差分判定部が、前記差分が前記移動装置の走行距離の倍数よりも大きいと判断した場合、前記送信電力演算部は、送信電力を走行距離の2乗分をもって下げるよう調整した前記調整値を算出するよう構成される、
請求項4記載の移動装置。
【請求項7】
前記移動装置は、
前記移動装置の動作状態を知らせるための出力を行う報知部と、
前記報知部の出力パターンと、前記移動装置の前記駆動条件と、を関連付けた報知条件を記憶する報知条件記憶部と、
前記駆動条件演算部が決定した前記駆動条件に基づいて、前記報知部を制御する条件を決定する報知条件決定部と、
をさらに含む、請求項3記載の移動装置。
【請求項8】
外部の測距装置と通信可能に設けられた第1の測距部及び第2の測距部と、装置本体を移動させる移動機構と、を有する移動装置を、コンピュータ又は電子回路により制御する移動装置の制御方法であって、
前記移動装置は、前記第1の測距部と、前記第2の測距部と、が、前記移動装置の回転中心を中心とした同心円上に所定の間隔以上離間して配置されるものであり、
前記コンピュータ又は前記電子回路が、
前記第1の測距部と前記測距装置間の距離である第1の距離を演算する第1の距離演算ステップと、
前記第2の測距部と前記測距装置間の距離である第2の距離を演算する第2の距離演算ステップと、
前記第1の距離及び前記第2の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記測距装置までの距離である第3の距離を演算する第3の距離演算ステップと、
前記第1の距離、前記第2の距離、及び前記第3の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から見た前記測距装置の方向角度である第1の方向角度を演算する第1の方向角度演算ステップと、
を実行する、移動装置の制御方法。
【請求項9】
前記コンピュータ又は前記電子回路が、
前記第3の距離と、前記第1の方向角度と、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記移動装置の回転中心までの距離と、に基づいて、前記移動装置の回転中心から見た前記測距装置の方向角度である第2の方向角度を演算する第2の方向角度演算ステップと、
前記第3の距離と、前記第1の方向角度と、前記第2の方向角度に基づいて、前記移動装置の回転中心から前記測距装置の距離である第4の距離を演算する第4の距離演算ステップと、
をさらに実行する、請求項8記載の前記移動装置の制御方法。
【請求項10】
外部の測距装置と通信可能に設けられた第1の測距部及び第2の測距部と、装置本体を移動させる移動機構と、を有する移動装置の制御装置であって、
前記移動装置は、前記第1の測距部と、前記第2の測距部と、が、前記移動装置の回転中心を中心とした同心円上に所定の間隔以上離間して配置されるものであり、
前記制御装置は、
前記第1の測距部と前記測距装置間の距離である第1の距離を演算する第1の距離演算部と、
前記第2の測距部と前記測距装置間の距離である第2の距離を演算する第2の距離演算部と、
前記第1の距離及び前記第2の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記測距装置までの距離である第3の距離を演算する第3の距離演算部と、
前記第1の距離、前記第2の距離、及び前記第3の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から見た前記測距装置の方向角度である第1の方向角度を演算する第1の方向角度演算部と、
を有する移動装置の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象領域を移動する移動装置、移動装置の制御装置、移動装置の制御方法、移動システム、及び移動型作業ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、対象領域の掃除、管理対象に対するロボットによる作業、荷物の運搬、又はサービス業務などにおいて、目的の移動を達成する無人型の移動装置の開発が進んでいる。このような移動装置では、室内における自装置の位置を把握して移動するために、予め対象室内のマップが記録されている。又は、LiDARセンサやカメラを用いた物体検知により対象領域のマップを自動作成する移動装置も知られている。
【0003】
マップを用いない場合、移動装置を対象領域の所定のルートに従って磁気誘導を用いて移動させるために、対象領域に磁気テープを事前に設置することがある。この場合には、移動装置は、固定された走行ルート上を自動走行する。
【0004】
他にも、移動装置の制御において、停止や回転などの移動装置の動作に関する情報を含むマーカを対象室内に適宜配置することもある。移動装置は、搭載されたカメラなどの撮像部でそのマーカを撮像し、マーカに含まれる情報に基づいて移動装置の動作を制御する。このようなマーカの一つとしては、対象領域に設置される旗状のサインポストがあげられる。
【先行技術文献】
【特許文献】
【0005】
特開2005‐275899号公報
特開2014-021624号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
磁気テープを用いた走行ルートの設定では、磁気テープの事前設置が不可欠であり、また走行ルートが固定されてしまう。例えばクリーンルーム等の清浄空間においては、磁気テープの設置自体が難しい場合もある。サインポストを用いて走行ルートの設定を行う場合には、走行ルートに沿って多数のサインポストを設置する必要があり、使用者に各サインポストの動作内容と使用方法を理解する負担が生じる。
【0007】
対象領域のマップを用いた移動装置の制御においては、地図情報の入力などにおいてロボット技術者や熟練した使用者による作業が必要となる。特に、初めて対象領域において移動装置を走行させる場合には、ロボット技術者と使用者の打ち合わせが不可欠となり手間と時間がかかる。すなわち、専門知識をもたない移動装置の使用者が、単独で所望の走行ルートを迅速かつ容易に設定することは難しい。また、マップを用いた移動装置では、無線通信を用いた測位を行う場合、固定機設置位置によっては測位できないエリアが生じる可能性がある。また、測位精度にも影響を及ぼすため、固定機設置位置の入念な設計と、マップ上の位置と実際の位置の正確な一致が必要となる。
【0008】
本発明は、上述したような従来技術の問題点を解決するために提案されたものである。その目的は、使用者の設定負担を軽減した移動装置、移動装置の制御装置、移動装置の制御方法、移動システム、及び移動型作業ロボットを提供することにある。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、本発明の移動装置は、以下のような特徴を有している。
(1)外部の測距装置と通信可能に設けられた第1の測距部及び第2の測距部と、装置本体を移動させる移動機構と、制御部と、を有する移動装置であって、前記第1の測距部と、前記第2の測距部と、は、前記移動装置の回転中心を中心とした同心円上に所定の間隔以上離間して配置され、前記制御部は、前記第1の測距部と前記測距装置間の距離である第1の距離を演算する第1の距離演算部と、前記第2の測距部と前記測距装置間の距離である第2の距離を演算する第2の距離演算部と、前記第1の距離及び前記第2の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記測距装置までの距離である第3の距離を演算する第3の距離演算部と、前記第1の距離、前記第2の距離、及び前記第3の距離に基づいて、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から見た前記測距装置の方向角度である第1の方向角度を演算する第1の方向角度演算部と、を有する。
【0010】
(2)前記制御部は、前記第3の距離と、前記第1の方向角度と、前記第1の測距部と前記第2の測距部を結ぶ直線の中点から前記移動装置の回転中心までの距離と、に基づいて、前記移動装置の回転中心から見た前記測距装置の方向角度である第2の方向角度を演算する第2の方向角度演算部と、前記第3の距離と、前記第1の方向角度と、前記第2の方向角度に基づいて、前記移動装置の回転中心から前記測距装置までの距離である第4の距離を演算する第4の距離演算部と、をさらに有して良い。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社テクノ菱和
移動装置、移動装置の制御装置、移動装置の制御方法、移動システム、及び移動型作業ロボット
14日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
3か月前
株式会社カネカ
製造システム
18日前
株式会社ダイヘン
移動体
3か月前
ローム株式会社
基準電圧源
15日前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
26日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
22日前
株式会社ダイフク
搬送設備
4日前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
トヨタ自動車株式会社
移動制御システム
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社鷺宮製作所
制御装置
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
配送システム
18日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
4日前
トヨタ自動車株式会社
クラッチペダル
29日前
株式会社ダイヘン
負荷時タップ切換器
3か月前
マーク ヘイリー
消防ロボット
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
27日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
株式会社テイエルブイ
減圧弁の制御装置
2か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ