TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124265
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020195
出願日
2024-02-14
発明の名称
表示制御方法、情報表示システム及び表示制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20250819BHJP(信号)
要約
【課題】先行車両の後方を走行する車両の乗員に対して適切な情報を知らせる。
【解決手段】表示制御方法は、先行車両2の周囲の景色を撮影した周囲画像を、先行車両2から受信し、周囲画像をディスプレイ12に表示するための表示条件を具備しているか否かを判断し、表示条件を具備している場合に、周囲画像をディスプレイ12に表示する。表示条件は、交差点105における先行車両2の進行状況が、周囲画像の撮影方向に応じて定まる所定の状況に到達したことである。
【選択図】図3
特許請求の範囲
【請求項1】
自車両のディスプレイに情報を表示する表示制御装置によって実行される表示制御方法であって、
前記自車両の前方を走行する先行車両から前記先行車両の周囲の景色を撮影した周囲画像を、前記先行車両から受信し、
前記周囲画像を前記ディスプレイに表示するための表示条件を具備しているか否かを判断し、
前記表示条件を具備している場合に、前記周囲画像を前記ディスプレイに表示する、ことを含み、
前記表示条件は、交差点における前記先行車両の進行状況が、前記周囲画像の撮影方向に応じて定まる所定の状況に到達したことである、
表示制御方法。
続きを表示(約 1,800 文字)
【請求項2】
前記周囲画像は、前記先行車両の前方の景色及び後方の景色の一方を撮影した先行車両第1画像であり、
前記表示条件は、前記交差点において前記先行車両が右折又は左折を完了したことである、
請求項1記載の表示制御方法。
【請求項3】
前記先行車両の進行方向を、前記先行車両から受信し、
前記自車両の進行方向を検出する、ことをさらに含み、
前記表示条件は、前記自車両の進行方向に対する前記先行車両の進行方向のなす角度の絶対値が判定閾値以上となることである、
請求項2記載の表示制御方法。
【請求項4】
前記自車両に搭載されたカメラから、前記自車両の前方の景色を撮影した自車両前方画像を取得し、
前記自車両前方画像を前記ディスプレイに表示する、ことをさらに含み、
前記周囲画像を前記ディスプレイに表示する場合には、前記自車両前方画像上に前記先行車両第1画像を重畳的に表示するとともに、
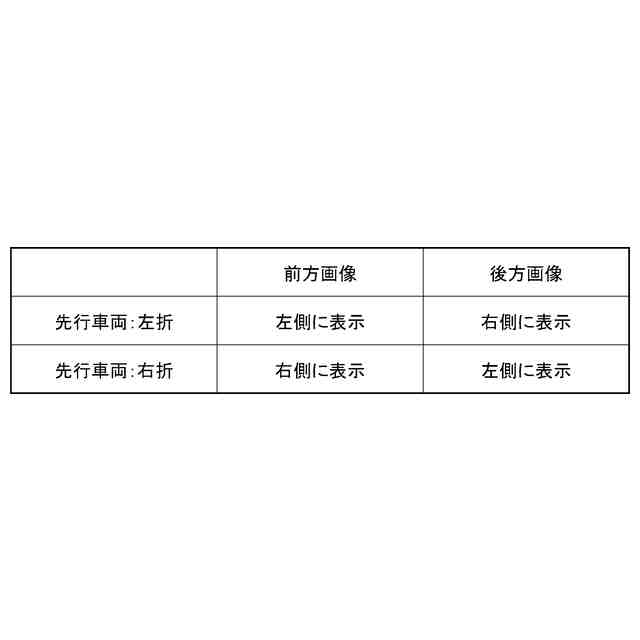
前記交差点において前記先行車両が右折又は左折を完了したときの前記先行車両第1画像が、前記自車両からみて前記交差点の右折方向の景色を含む場合には、前記自車両前方画像上において前記先行車両第1画像を右側に表示し、
前記交差点において前記先行車両が右折又は左折を完了したときの前記先行車両第1画像が、前記自車両からみて前記交差点の左折方向の景色を含む場合には、前記自車両前方画像上において前記先行車両第1画像を左側に表示する、
請求項3記載の表示制御方法。
【請求項5】
前記周囲画像は、前記先行車両第1画像に加え、前記先行車両の前方の景色及び後方の景色の他方を撮影した先行車両第2画像をさらに含み、
前記周囲画像を前記ディスプレイに表示する場合には、前記自車両前方画像上に前記先行車両第1画像及び前記先行車両第2画像を重畳的に表示するとともに、
前記自車両前方画像上において、前記先行車両第2画像を左右方向において前記先行車両第1画像の反対側に表示する、
請求項4記載の表示制御方法。
【請求項6】
前記先行車両の進行方向を、前記先行車両から受信し、
前記自車両の進行方向を検出する、ことをさらに含み、
前記周囲画像は、前記先行車両の前方の景色を撮影した先行車両前方画像と、前記先行車両の後方の景色を撮影した先行車両後方画像とを含み、
前記先行車両前方画像の前記表示条件は、前記自車両の進行方向に対する前記先行車両の進行方向のなす角度の絶対値が前方判定閾値以上となることであり、
前記先行車両後方画像の前記表示条件は、前記自車両の進行方向に対する前記先行車両の進行方向のなす角度の絶対値が後方判定閾値以上となることであり、
前記後方判定閾値は、前記前方判定閾値よりも大きな値に設定されている、
請求項2記載の表示制御方法。
【請求項7】
前記先行車両に接近する移動体があるか否かを判断し、
前記先行車両に接近する移動体がある場合には、前記先行車両に接近する移動体がない場合よりも前記判定閾値が小さい値に設定される、
請求項3記載の表示制御方法。
【請求項8】
前記周囲画像が送信する複数の先行車両がある場合には、
前記複数の先行車両の位置を表示し、
前記複数の先行車両の中から、前記周囲画像を表示する前記先行車両を乗員に選択させる、ことをさらに含む、
請求項1記載の表示制御方法。
【請求項9】
前記先行車両が前記交差点を右折又は左折した後の道路の角度を特定し、
前記道路の角度に応じて、前記判定閾値を調整する、ことをさらに含む、
請求項3記載の表示制御方法。
【請求項10】
前記先行車両の進行方向を、前記先行車両から受信し、
前記先行車両が前記交差点を右折又は左折した後の道路の角度を特定する、ことをさらに含み、
前記表示条件は、前記道路の角度と前記先行車両の進行方向のなす角度が判定閾値以下となることである、
請求項3記載の表示制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、表示制御方法、情報表示システム及び表示制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1は、後続車両の乗員が交通事故の情報をより正確に把握することができる車載用情報処理装置を開示している。車載用情報処理装置は、制御部と、他の車両と通信を行う通信部と、車両の走行環境に関する情報を取得する走行環境情報取得部と、を備えている。制御部は、交通事故が発生した地点に車両が到達すると、走行環境情報取得部によって取得された地点における走行環境に関する情報を、通信部によって後続車両に送信する。
【先行技術文献】
【特許文献】
【0003】
特開2020-140237号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された手法には、後続車両(自車両)が、他の車両から送信される情報をどのように乗員に知らせるかについては開示されていない。先行車両が交差点を走行する状況においては、先行車両の後方を走行する車両の乗員に対して適切な情報を知らせることができない可能性がある。
【0005】
本発明は、上記課題に鑑みて成されたものであり、その目的は、先行車両の後方を走行する車両の乗員に対して適切な情報を知らせることができる表示制御方法、情報表示システム及び表示制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様に係わる表示制御方法は、先行車両の周囲の景色を撮影した周囲画像を先行車両から受信し、周囲画像をディスプレイに表示するための表示条件を具備している場合に、周囲画像をディスプレイに表示する。表示条件は、交差点における先行車両の進行状況が、周囲画像の撮影方向に応じて定まる所定の状況に到達したことである。
【発明の効果】
【0007】
本発明によれば、先行車両の後方を走行する車両の乗員に対して適切な情報を知らせることができる。
【図面の簡単な説明】
【0008】
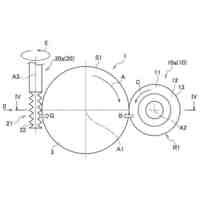
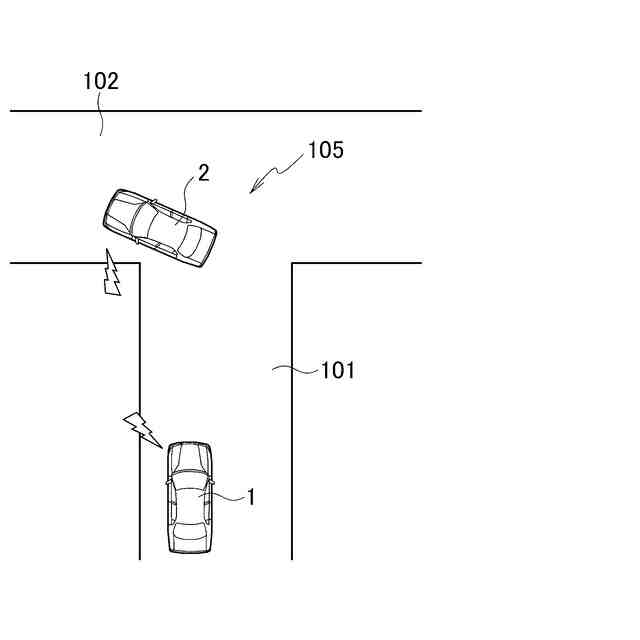
図1は、本実施形態に係る情報表示システムを説明する図である。
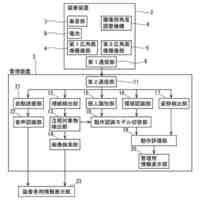
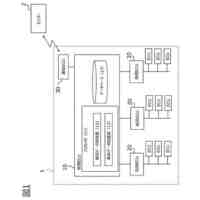
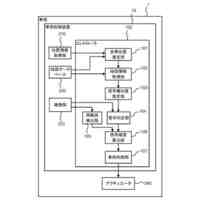
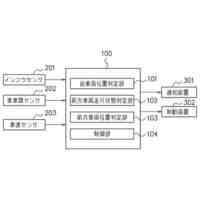
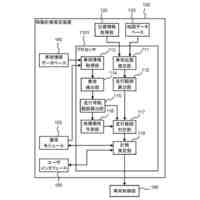
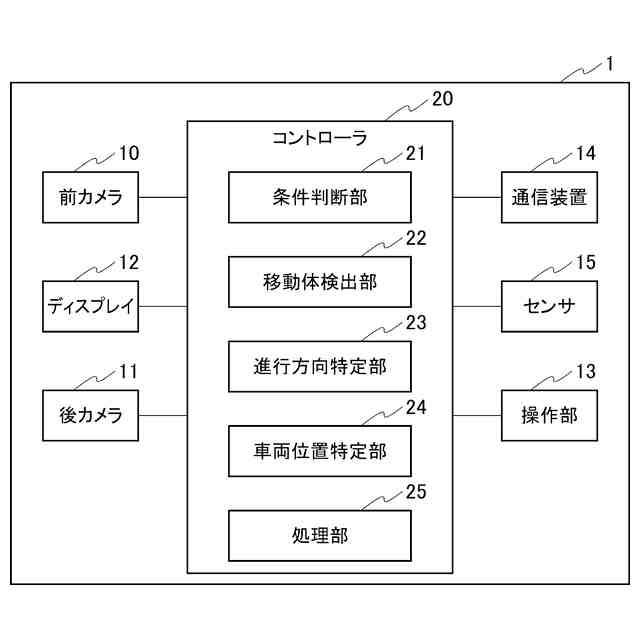
図2は、自車両の構成を示すブロック図である。
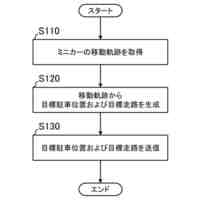
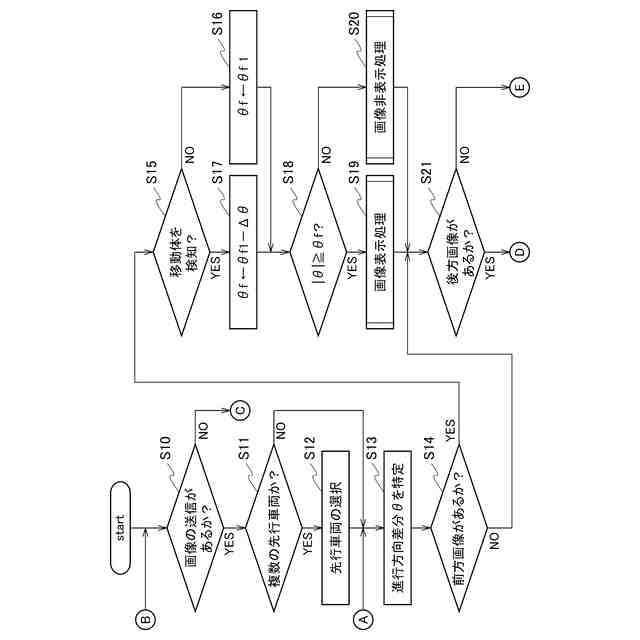
図3は、情報表示システムにおける表示制御方法を説明するフローチャートである。
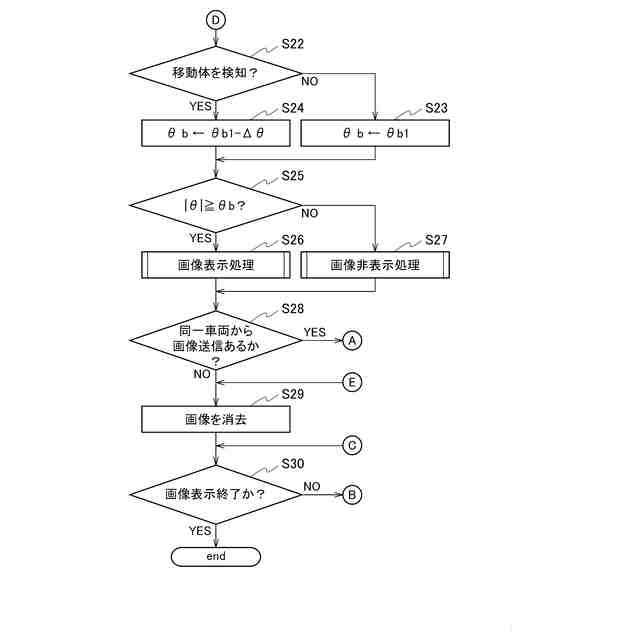
図4は、情報表示システムにおける表示制御方法を説明するフローチャートである。
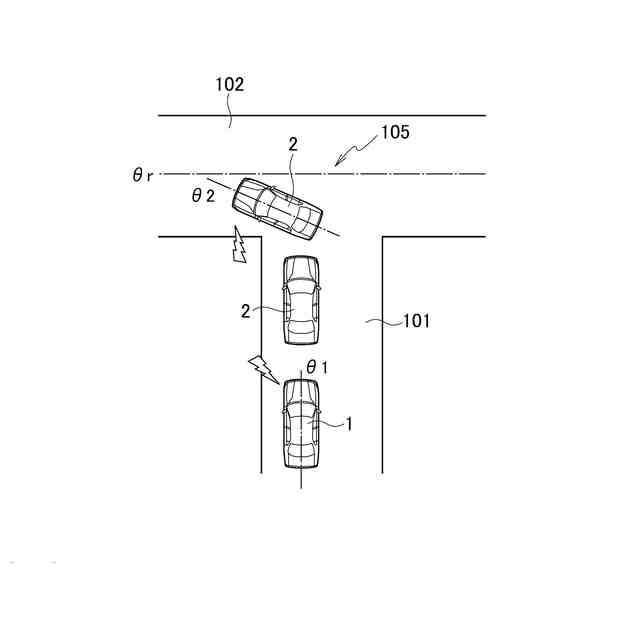
図5は、交差点における自車両及び先行車両の走行状況を例示する図である。
図6は、画像表示処理の概念を示す説明図である。
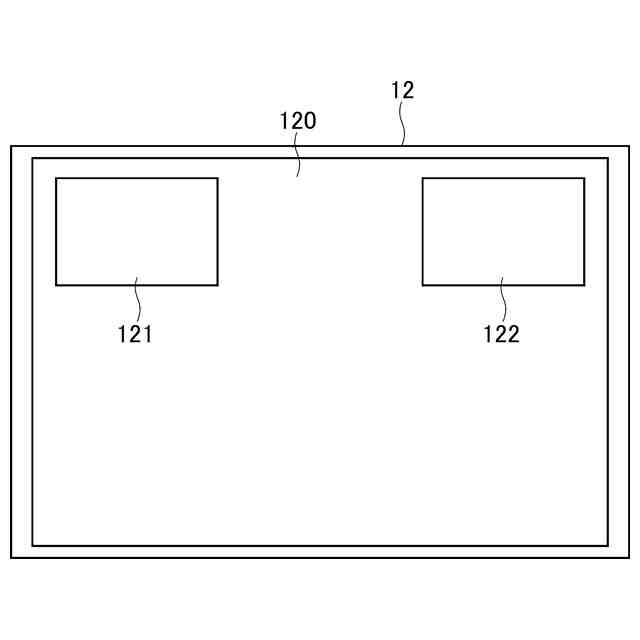
図7は、ディスプレイに表示される画像の概念を示す説明図である。
【発明を実施するための形態】
【0009】
図面を参照して、実施形態を説明する。図面の記載において同一部分には同一符号を付して説明を省略する。
【0010】
図1に示すように、第1道路101と第2道路とが交差するT字路の交差点105を例に挙げて、本実施形態に係る情報表示システム、表示制御装置及び表示制御方法について説明する。本実施形態に係る情報表示システムは、自車両1と、自車両1の前方を走行する先行車両2とを備えている。情報表示システムにおいて、自車両1は、先行車両2の周囲の景色を撮影した周囲画像を先行車両2から受信し、受信した周囲画像を自車両1の乗員に表示する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
電子部品
12日前
日産自動車株式会社
電子機器
23日前
日産自動車株式会社
全天球撮像装置
22日前
日産自動車株式会社
ステータ及びその製造方法
12日前
日産自動車株式会社
ステータ及びその製造方法
12日前
日産自動車株式会社
製品検査方法及び製品検査装置
今日
日産自動車株式会社
情報処理方法及び情報処理装置
23日前
日産自動車株式会社
情報処理方法及び情報処理装置
12日前
日産自動車株式会社
内燃機関の再始動制御方法および装置
21日前
日産自動車株式会社
充放電制御方法及び充放電制御システム
今日
日産自動車株式会社
車両データ処理装置及び車両データ処理方法
28日前
日産自動車株式会社
経路選出装置、経路選出方法及びプログラム
今日
日産自動車株式会社
経路選出装置、経路選出方法及びプログラム
今日
日産自動車株式会社
ブレーキ異音検知方法、装置およびプログラム
23日前
日産自動車株式会社
ピッチ挙動制御方法、及び、ピッチ挙動制御装置
26日前
日産自動車株式会社
車両用内燃機関のトルクダウン制御方法および装置
13日前
日産自動車株式会社
燃料タンクおよびマフラを含む構造体、および車両
13日前
日産自動車株式会社
車両制御装置、車両制御システム、車両制御方法及びプログラム
20日前
日産自動車株式会社
金属粉末形成方法
6日前
日産自動車株式会社
移動計画策定装置、移動管理システム、移動計画策定方法及びプログラム
22日前
TOPPANエッジ株式会社
駐車管理システム、駐車管理方法および情報処理装置
2日前
日本精機株式会社
路面投影装置
3か月前
日本精機株式会社
警報システム
1か月前
個人
自動電動車椅子
13日前
エムケー精工株式会社
車両誘導装置
1か月前
スズキ株式会社
運転支援装置
29日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
23日前
個人
磁気路上での車両の路線離脱防御
2日前
ニッタン株式会社
検知器
21日前
ニッタン株式会社
検知器
21日前
個人
防犯に特化したアプリケーション
3か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
3か月前
ニッタン株式会社
発信機
2か月前
株式会社国際電気
防災システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ