TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025123873
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019618
出願日
2024-02-13
発明の名称
車両制御方法、及び車両制御装置
出願人
日産自動車株式会社
代理人
弁理士法人樹之下知的財産事務所
主分類
G08G
1/16 20060101AFI20250818BHJP(信号)
要約
【課題】自車が計画する走路と、他車が予測する自車の走路との乖離を抑制可能な走路を設定する車両制御方法、及び車両制御装置を提供する。
【解決手段】車両制御装置は、自車が走行する走行計画情報を取得する走行計画取得ステップと、走行計画情報に基づいて自車が左折する左折路で、かつ、自車が2車線目以降を目標車線として進入する対象交差点を検出する対象交差点検出ステップと、対象交差点において対向右折車を検出する対向車検出ステップと、対象交差点において自車が目標車線に進入する走行予定領域内に判定基準点を設定する基準点設定ステップと、自車が対向右折車を回避して目標車線に進入する走路であって、当該走路の各点における接線が判定基準点より右側となる回避走路を生成する走路生成ステップと、を実施する。
【選択図】図5
特許請求の範囲
【請求項1】
コンピュータにより車両を制御する車両制御方法であって、
前記コンピュータは、
自車が走行する経路に関する経路情報、及び当該経路上で前記自車が走行する車線を示す車線指示情報を含む走行計画情報を取得する走行計画取得ステップと、
前記走行計画情報に基づいて、前記自車が左折する交差点であって、当該交差点での左折先の道路である左折路が複数の車線を有し、かつ、前記自車が当該左折路において左から数えて2番目以降の前記車線を目標車線として進入する前記交差点を対象交差点として検出する対象交差点検出ステップと、
前記対象交差点において、前記自車の周囲物体を検出する周囲検出センサを用いて、前記自車の対向車線から前記左折路に進入する対向右折車を検出する対向車検出ステップと、
前記対象交差点において、前記自車が前記目標車線に進入する走行予定領域内に判定基準点を設定する基準点設定ステップと、
前記自車が前記対向右折車を回避して前記目標車線に進入する走路であって、当該走路の各点における接線が前記判定基準点より右側となる回避走路を生成する走路生成ステップと、を実施する、車両制御方法。
続きを表示(約 1,600 文字)
【請求項2】
前記基準点設定ステップにおいて、前記対象交差点で前記自車が左折前に走行する左折前車線から前記左折路に進入するときの前記自車の進行方向を経路長方向とし、前記経路長方向に直交する方向を垂直方向として、前記垂直方向に対して前記目標車線の左境界位置と前記目標車線の中央位置との間で、かつ、前記経路長方向に対して前記目標車線の始点から前記対向右折車との間に前記判定基準点を設定する、
請求項1に記載の車両制御方法。
【請求項3】
前記基準点設定ステップにおいて、前記垂直方向に対して、前記左境界位置と、前記中央位置とを予め設定された所定の第一比で内分した内分点を前記判定基準点として設定する、
請求項2に記載の車両制御方法。
【請求項4】
前記基準点設定ステップにおいて、前記垂直方向に対して、前記左境界位置と、前記中央位置とを第一比で内分した内分点を前記判定基準点として設定し、
前記第一比として、前記周囲検出センサにより検出された周囲の車両の数に基づく混雑度が高いほど、前記判定基準点が前記中央位置に近づく比を用いる、
請求項2に記載の車両制御方法。
【請求項5】
前記基準点設定ステップにおいて、前記経路長方向に対して、前記目標車線の前記始点と、前記対向右折車の位置とを予め設定された所定の第二比で内分した内分点を前記判定基準点として設定する、
請求項2に記載の車両制御方法。
【請求項6】
前記基準点設定ステップにおいて、前記経路長方向に対して、前記目標車線の前記始点と、前記対向右折車の位置とを第二比で内分した内分点を前記判定基準点として設定し、
前記第二比として、前記周囲検出センサにより検出された周囲の車両の数に基づく混雑度が高いほど、前記判定基準点が前記対向右折車に近づく比を用いる、
請求項2に記載の車両制御方法。
【請求項7】
前記対向右折車を回避する前記回避走路の要否を判定する回避判定ステップをさらに実施し、
前記基準点設定ステップは、前記回避走路が必要と判定された場合に、前記判定基準点を設定し、
前記走路生成ステップにおいて、前記回避走路が必要と判定された場合に、前記判定基準点に基づいた前記回避走路を生成し、前記回避走路が不要と判定された場合に、前記対向右折車を回避しない走路を生成する、
請求項1に記載の車両制御方法。
【請求項8】
前記走路生成ステップにおいて、各点の接線が前記判定基準点より右側となる前記回避走路の生成が不可能である場合に、前記対向右折車を回避しない走路を生成する、
請求項1に記載の車両制御方法。
【請求項9】
自車が走行する経路に関する経路情報、及び当該経路上で前記自車が走行する車線を示す車線指示情報を含む走行計画情報を取得する走行計画取得部と、
前記走行計画情報に基づいて、前記自車が左折する交差点であって、当該交差点での左折先の道路である左折路が複数の車線を有し、かつ、前記自車が当該左折路において左から数えて2番目以降の前記車線を目標車線として進入する前記交差点を対象交差点として検出する対象交差点検出部と、
前記対象交差点において、前記自車の周囲物体を検出する周囲検出センサを用いて、前記自車の対向車線から前記左折路に進入する対向右折車を検出する対向車検出部と、
前記対象交差点において、前記自車が前記目標車線に進入する走行予定領域内に判定基準点を設定する基準点設定部と、
前記自車が前記対向右折車を回避して前記目標車線に進入する走路であって、当該走路の各点における接線が前記判定基準点より右側となる回避走路を生成する走路生成部と、を備える、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御方法、及び車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両の自動運転に係る車両制御方法に関し、車両が障害物に接触しないように走路を設定する技術が知られている(例えば、特許文献1)。特許文献1の車両制御方法では、車両の走行レーンと、当該走行レーン上の障害物とを検出し、検出した障害物を、走路の右側及び左側の2つのグループに区別する。そして、車線境界情報や障害物の特徴点を抽出し、左右のグループに属するそれぞれの特徴点同士の中間にある点を順に結ぶ走路を設定する。
【先行技術文献】
【特許文献】
【0003】
特開2014-136480号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
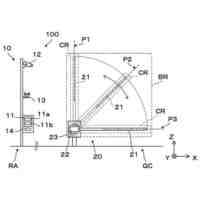
ところで、自車の走路として、所定の車線から、複数の車線を有する左折路に左折し、かつ、当該左折路の2車線目以降を目標車線として左折進入する走路が設定されている場面がある。なお、ここで2車線目とは、左折路において最も左の車線を1車線目とし、左から数えて2番目の車線を意味する。このような場面で、さらに、左折前の自車が走行中の車線の対向車線で、対向右折車が右折のために停車している場合がある。
【0005】
このような場面に対して、上記特許文献1の車両制御方法では、右折のために停車している対向右折車を障害物として検出し、検出した障害物の特徴点と、車線境界情報等のその他の特徴点とに基づいて、左右の特徴点の中間の点を通って対向右折車を回避する走路が設定される。しかしながら、このような走路では、自車が本来進入したい目標車線よりも左側に寄った走路が設定される場合がある。この場合、対向右折車は、自車が目標車線の左側の車線を走行すると予測してしまい、対向右折車が目標車線に向かって走行を開始してしまうことが考えられる。
このように、自車が計画する走路と、他車が予測する自車の走路との乖離が生じると、自車と対向右折車との距離が近くなることで減速が必要になり、その結果、交差点での交通流を乱すおそれがある。
【0006】
本発明は、自車が計画する走路と、他車が予測する自車の走路との乖離を抑制可能な走路を設定する車両制御方法、及び車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の車両制御方法は、自車が交差点で左折する際に2番目以降の車線を目標車線として進入し、かつ対向右折車を検出した場合に、自車が目標車線に進入する走行予定領域内に判定基準点を設定し、走路の各点における接線が判定基準点より右側となる回避走路を生成する。
【発明の効果】
【0008】
本発明では、自車が計画する走路と、他車が予測する自車の走路との乖離を抑制して、他者から容易に判別可能な走路を設定できる。
【図面の簡単な説明】
【0009】
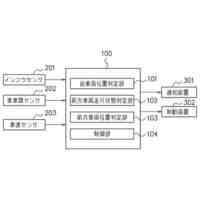
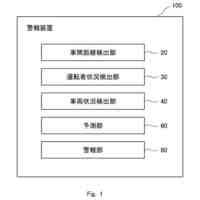
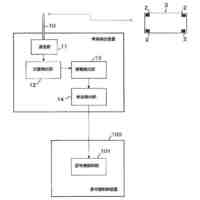
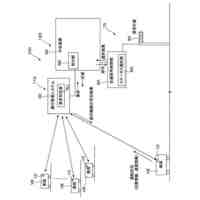
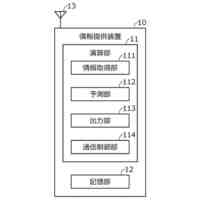
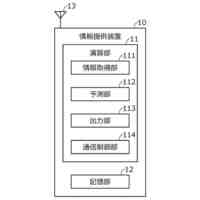
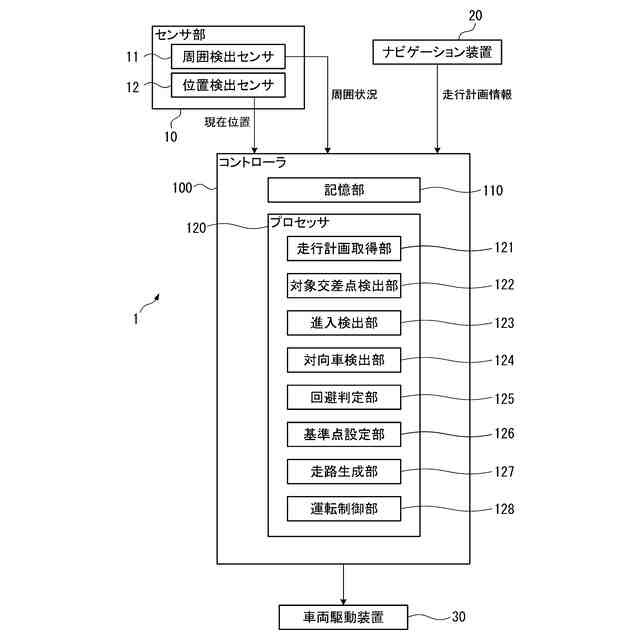
第一実施形態に係る車両制御装置の概略構成を示すブロック図。
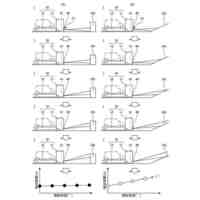
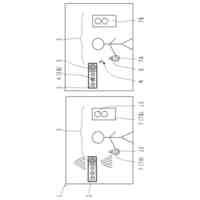
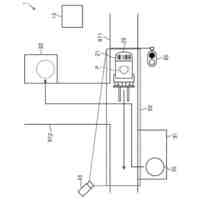
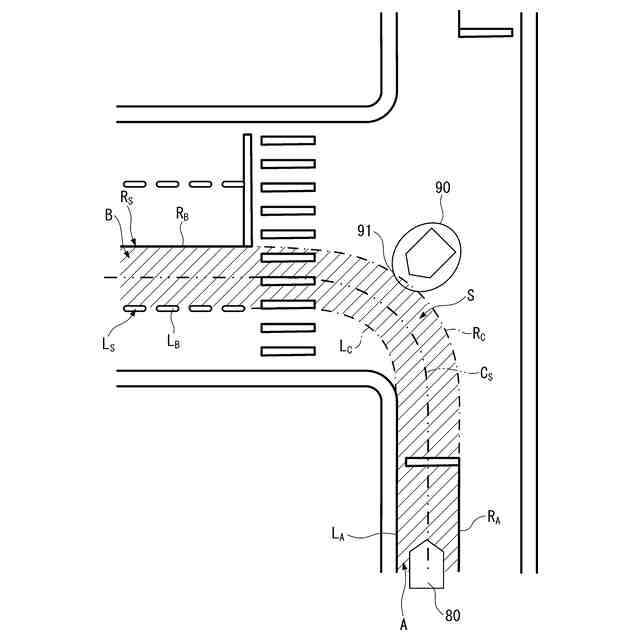
本実施形態における対象交差点の一例を示す図。
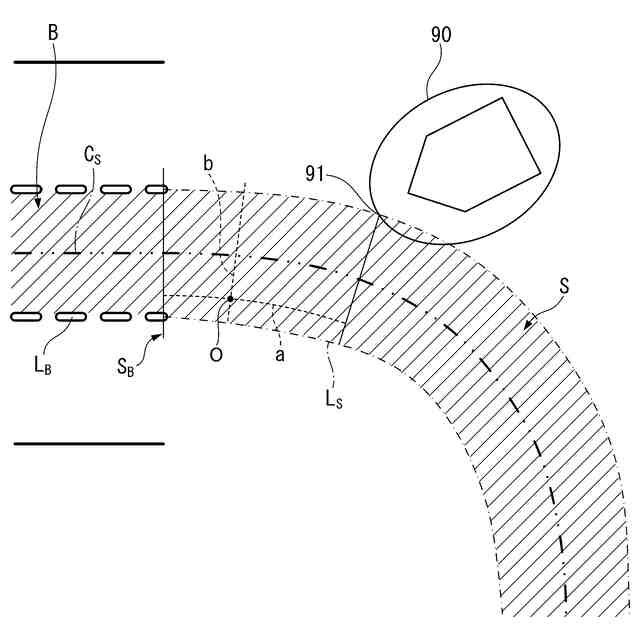
本実施形態の対象交差点における判定基準点の設定方法を説明するための説明図。
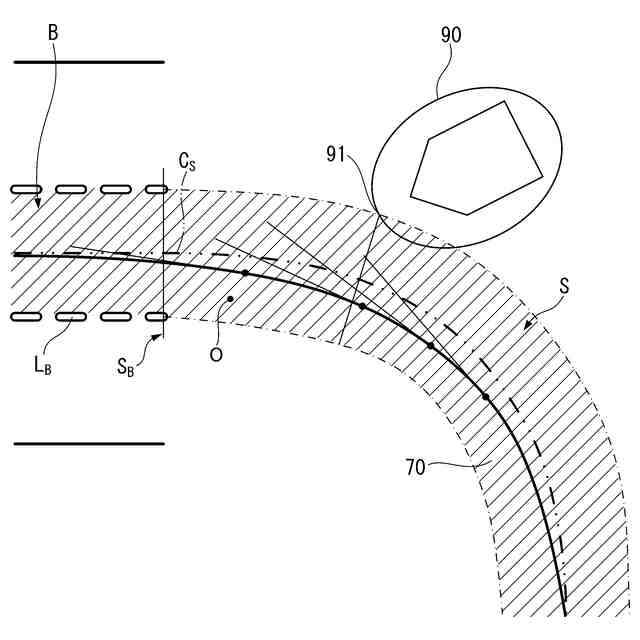
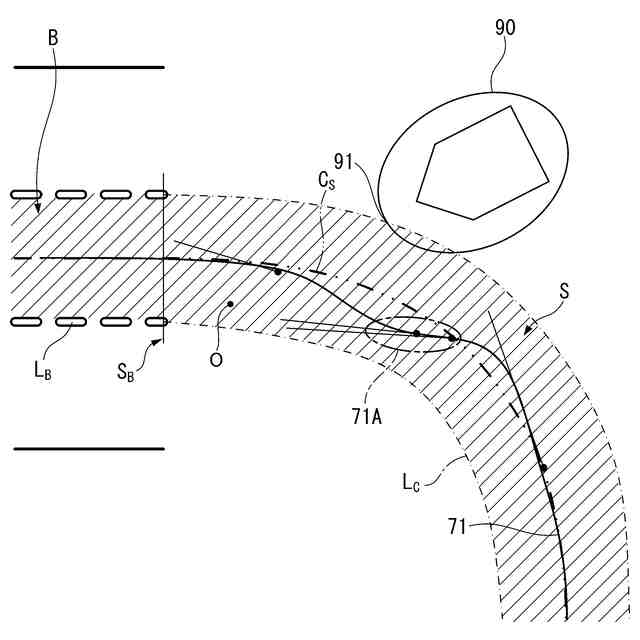
本実施形態の対象交差点での回避走路の生成例を示す図。
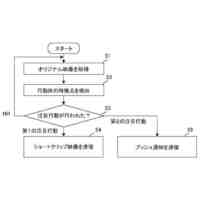
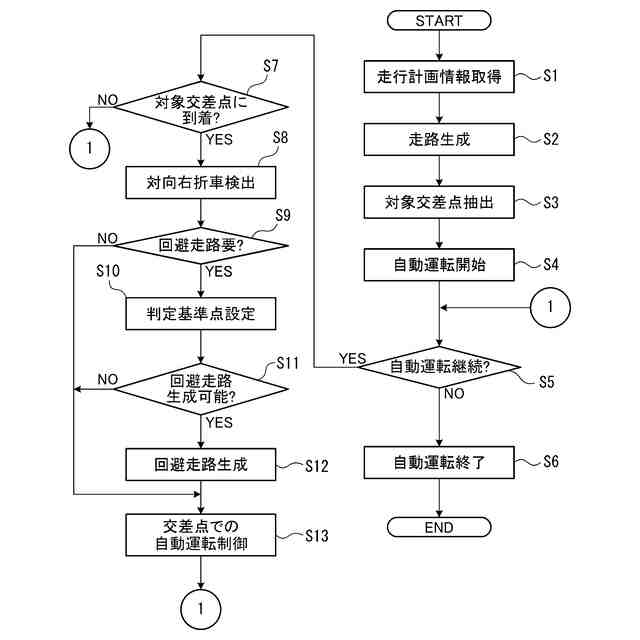
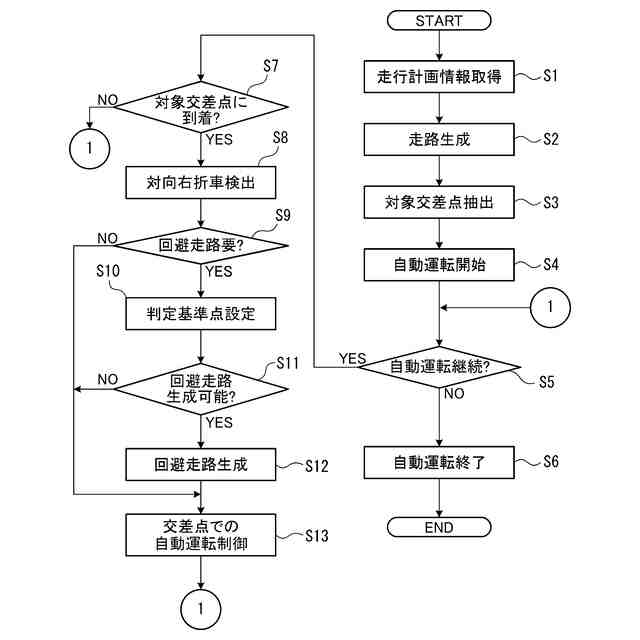
本実施形態の車両制御方法の一例を示すフローチャート。
判定基準点を用いずに設定した比較例の回避走路を示す図。
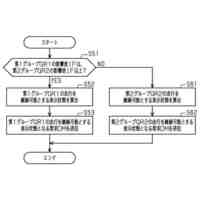
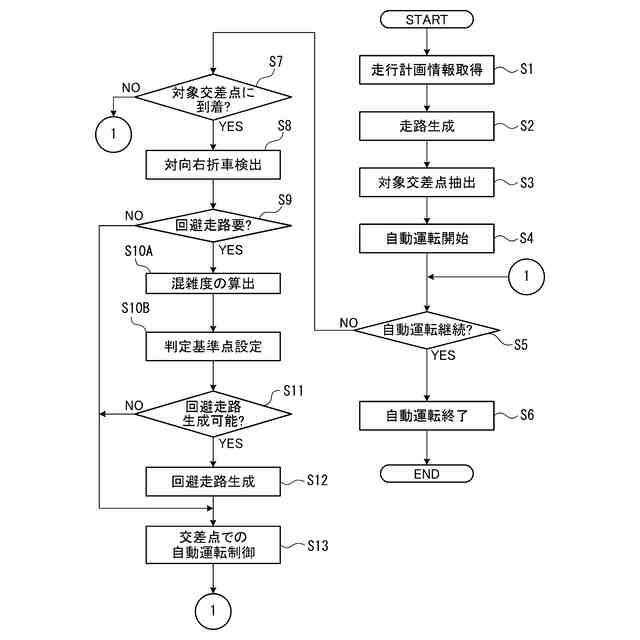
第二実施形態の車両制御方法の一例を示すフローチャート。
【発明を実施するための形態】
【0010】
[第一実施形態]
以下、本開示の第一実施形態に係る車両制御方法及び車両制御装置について説明する。
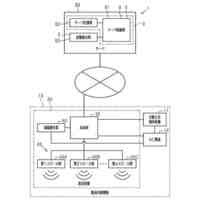
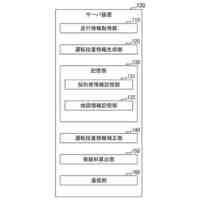
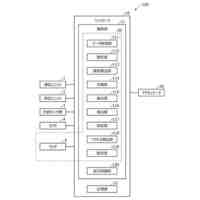
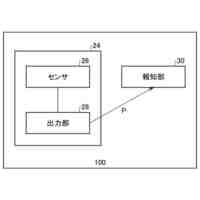
図1は、本実施形態に係る車両制御装置の概略構成を示すブロック図である。図1に示すように、本実施形態の車両制御装置1は、車両に搭載されて当該車両を制御する装置である。車両制御装置1は、各種情報を取得するセンサ部10と、ナビゲーション装置20と、車両駆動装置30と、コントローラ100と、等を備える。コントローラ100は、センサ部10、ナビゲーション装置20、及び車両駆動装置30等に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
路面投影装置
2か月前
日本精機株式会社
警報システム
27日前
個人
自動電動車椅子
10日前
エムケー精工株式会社
車両誘導装置
1か月前
スズキ株式会社
運転支援装置
26日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
2か月前
株式会社国際電気
防災システム
1か月前
ニッタン株式会社
検知器
18日前
ニッタン株式会社
検知器
20日前
ニッタン株式会社
検知器
18日前
トヨタ自動車株式会社
車両
1か月前
TOA株式会社
拡声放送システム
2か月前
個人
乗り物の移動を支援する方法及び装置
2か月前
株式会社JVCケンウッド
警報装置
2か月前
日本信号株式会社
情報提供システム
2か月前
株式会社小糸製作所
移動体検出装置
20日前
日本信号株式会社
異常走行検出装置
3日前
日本信号株式会社
信号情報システム
2か月前
トヨタ自動車株式会社
サーバ
3日前
株式会社アジラ
データ転送システム
2か月前
日本精機株式会社
報知装置及び報知システム
9日前
株式会社小糸製作所
車両検出システム
20日前
個人
現示内容に関する情報放送機能付き信号機
2か月前
日本信号株式会社
交通信号制御システム
2か月前
能美防災株式会社
火災感知器
23日前
トヨタ自動車株式会社
回避動作判別装置
2か月前
能美防災株式会社
非常伝達装置
26日前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
物体検出装置
1か月前
ヨシモトポール株式会社
接近報知システム
23日前
本田技研工業株式会社
情報提供装置
1か月前
本田技研工業株式会社
情報提供装置
1か月前
株式会社豊田自動織機
制御システム
2か月前
ホーチキ株式会社
火災検出システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ