TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122773
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018408
出願日
2024-02-09
発明の名称
センシング装置、センシング装置による方法、及びプログラム
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
個人
主分類
G01S
13/87 20060101AFI20250815BHJP(測定;試験)
要約
【課題】検知対象の位置を精度よく特定する。
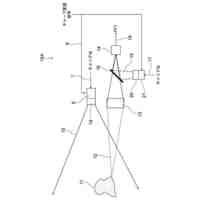
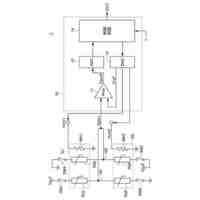
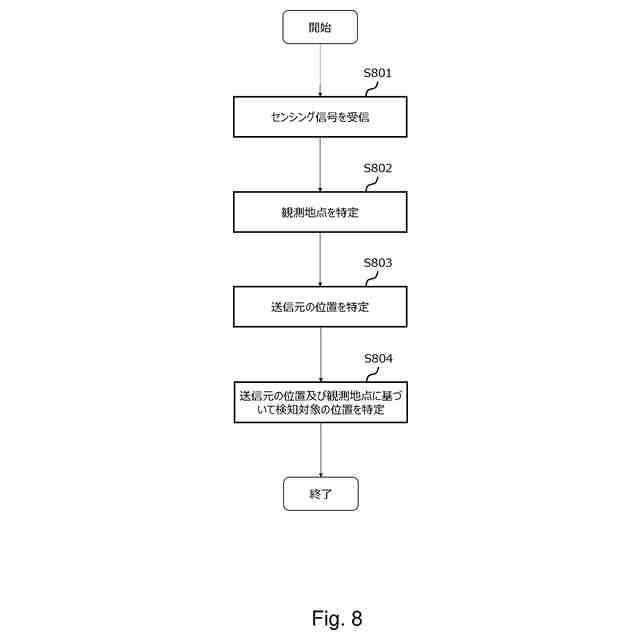
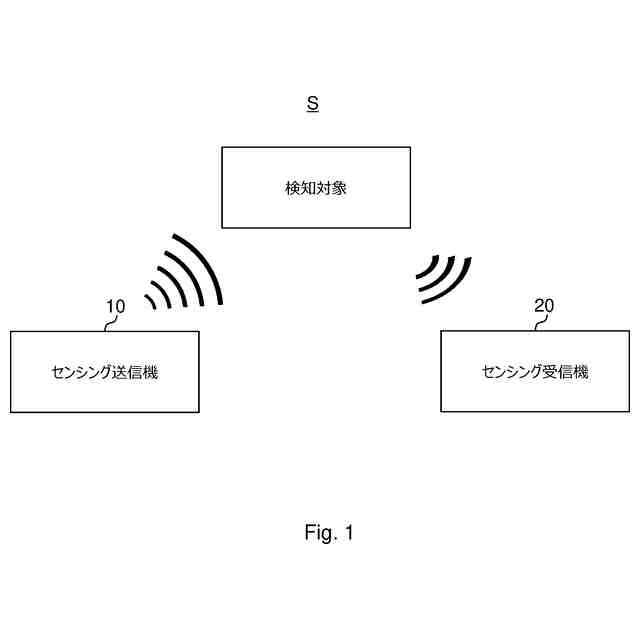
【解決手段】センシング装置20は、センシング送信機10から、センシング信号を受信するように構成された電波受信部20aと、センシング信号に基づいて、センシング装置を起点とした、検知対象までの距離及び方位を算出し、算出した距離及び方位に基づいて、観測点を特定するように構成された観測点算出部20bと、センシング送信機の位置を特定するように構成された送信元位置特定部20cと、観測点と、センシング送信機の位置とに基づいて、検知対象の位置を特定するように構成された検知対象特定部20dと、を含む。
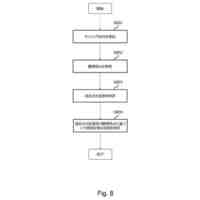
【選択図】図8
特許請求の範囲
【請求項1】
センシング装置(20)であって、
センシング送信機(10)から、センシング信号を受信するように構成された電波受信部(20a)と、
前記センシング信号に基づいて、前記センシング装置を起点とした、検知対象までの距離及び方位を算出し、算出した距離及び方位に基づいて、観測点を特定するように構成された観測点算出部(20b)と、
前記センシング送信機の位置を特定するように構成された送信元位置特定部(20c)と、
前記観測点と、前記センシング送信機の前記位置とに基づいて、前記検知対象の位置を特定するように構成された検知対象特定部(20d)と、
を含む、センシング装置。
続きを表示(約 1,300 文字)
【請求項2】
前記送信元位置特定部は、前記センシング送信機までの距離を算出するように更に構成され、
前記検知対象特定部は、前記検知対象への前記方位と、前記検知対象までの前記距離と、前記センシング送信機までの前記距離とに基づいて、三角測量を行うことによって、前記検知対象の前記位置を特定するように更に構成されている、
請求項1に記載のセンシング装置。
【請求項3】
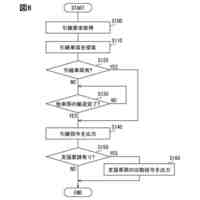
前記送信元位置特定部は、前記センシング信号が直接波であるか否かを判定し、直接波であると判定されたセンシング信号に基づいて、前記センシング送信機の前記位置を特定するように更に構成されている、請求項1に記載のセンシング装置。
【請求項4】
前記送信元位置特定部は、最も早く到達したセンシング信号が直接波であると判定するように更に構成されている、請求項3に記載のセンシング装置。
【請求項5】
前記送信元位置特定部は、直接波であると判定されたセンシング信号を選択し、前記選択されたセンシング信号に基づいて特定された観測点を、前記センシング送信機の前記位置として選択するように更に構成されている、請求項4に記載のセンシング装置。
【請求項6】
前記送信元位置特定部は、信号強度に基づいて、前記センシング信号が直接波であるか否かを判定するように更に構成されている、請求項1に記載のセンシング装置。
【請求項7】
前記送信元位置特定部は、直接波であると判定されたセンシング信号を選択し、前記選択されたセンシング信号に基づいて特定された観測点を、前記センシング送信機の前記位置として選択するように更に構成されている、請求項6に記載のセンシング装置。
【請求項8】
前記送信元位置特定部は、前記センシング信号が一定レベルの信号強度を有するか否かを判定し、
一定レベルの信号強度を有するセンシング信号が存在しない場合、一定時間経過後、
前記電波受信部は、前記センシング送信機から、センシング信号を受信するように更に構成され、
前記送信元位置特定部は、前記センシング信号が一定レベルの信号強度を有するか否かを判定するように更に構成されている、
請求項6に記載のセンシング装置。
【請求項9】
前記電波受信部は、前記センシング送信機から、通信信号を受信するように更に構成され、前記通信信号は、前記センシング送信機の位置に関する位置情報を含み、
前記送信元位置特定部は、前記位置情報に基づいて、前記センシング送信機の前記位置を特定するように更に構成されている、
請求項1に記載のセンシング装置。
【請求項10】
前記送信元位置特定部は、前記センシング信号が一定レベルの信号強度を有するか否かを判定し、
一定レベルの信号強度を有するセンシング信号が存在しない場合、前記電波受信部は、前記センシング送信機から、前記通信信号を受信するように更に構成されている、
請求項9に記載のセンシング装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、センシング装置、センシング装置による方法、及びプログラムに関し、特に、センシング信号を送信する装置の位置に基づいて、検知対象の位置を特定するセンシング装置、センシング装置による方法、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
第3世代パートナーシッププロジェクト(Third Generation Partnership Project、3GPP(登録商標))は、5G NR(Fifth Generation New Radio)と称される無線通信仕様を規定し、その無線仕様の技術開発が進展している。
【0003】
また、5G NRに続いて、第6世代の無線通信仕様である6Gシステムが検討され始めている。6Gシステムでは、センシングソリューションに関する技術仕様が検討されている。センシングソリューションは、ドップラー効果を利用して、放出した電波の周波数スペクトルの変化を分析することによって、検知対象を検知するものである。
【0004】
特許文献1は、電波を用いてターゲットの状態を判定するためのセンシング技術を開示している。
【先行技術文献】
【特許文献】
【0005】
国際公開第2021/215080号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載された技術は、通信装置においてセンシングしたターゲットのセンシング結果と、別の通信装置がターゲットをセンシングしたことによるセンシング結果とに基づいて、ターゲットの状態を判定する。
【0007】
特許文献1に記載された技術は、センシングを行うための電波を送信する装置の位置に基づいて、ターゲットの位置を判定するものではない。
【0008】
以上の事情に鑑み、本発明は、センシング信号を送信する装置の位置に基づいて、検知対象の位置を特定する技術を提供する。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明におけるセンシング装置(20)は、センシング送信機(10)から、センシング信号を受信するように構成された電波受信部(20a)と、前記センシング信号に基づいて、前記センシング装置を起点とした、検知対象までの距離及び方位を算出し、算出した距離及び方位に基づいて、観測点を特定するように構成された観測点算出部(20b)と、前記センシング信号に基づいて、前記センシング送信機の位置を特定するように構成された送信元位置特定部(20c)と、前記観測点と、前記センシング送信機の前記位置とに基づいて、前記検知対象の位置を特定するように構成された検知対象特定部(20d)と、を含む。
【0010】
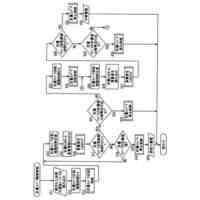
更に、本発明におけるセンシング装置(20)によって実行される方法は、センシング送信機(10)から、センシング信号を受信することと、前記センシング信号に基づいて、前記センシング装置を起点とした、検知対象までの距離及び方位を算出し、算出した距離及び方位に基づいて、観測点を特定することと、前記センシング信号に基づいて、前記センシング送信機の位置を特定することと、前記観測点と、前記センシング送信機の前記位置とに基づいて、前記検知対象の位置を特定することと、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SOKEN
電解セル
13日前
株式会社SOKEN
回転電機
11日前
株式会社SOKEN
吸音構造体
6日前
株式会社SOKEN
電子制御装置
6日前
株式会社SOKEN
関節車輪機構
23日前
株式会社SOKEN
電動モビリティ
2日前
株式会社SOKEN
生体検出装置、生体検出方法
10日前
株式会社SOKEN
車両制御装置、車両制御プログラム及び車両制御方法
9日前
株式会社SOKEN
インバータ制御装置、プログラム、インバータ制御方法
2日前
株式会社SOKEN
センシング装置、センシング装置による方法、及びプログラム
9日前
株式会社SOKEN
センシング装置、センシング装置による方法、及びプログラム
9日前
株式会社SOKEN
搬送制御システム、搬送制御装置、搬送車両、搬送制御方法、搬送制御プログラム
6日前
株式会社SOKEN
電力変換器の制御装置、電力変換システム、プログラム、及び電力変換器の制御方法
17日前
個人
微小振動検出装置
2日前
ユニパルス株式会社
力変換器
23日前
株式会社イシダ
X線検査装置
2日前
三菱電機株式会社
計測器
17日前
株式会社豊田自動織機
産業車両
1か月前
株式会社ミツトヨ
測定器
1か月前
横浜ゴム株式会社
音響窓
25日前
個人
センサーを備えた装置
27日前
株式会社辰巳菱機
システム
11日前
株式会社国際電気
試験装置
1か月前
日置電機株式会社
測定装置
24日前
日本精機株式会社
施工管理システム
27日前
IPU株式会社
距離検出装置
23日前
株式会社東芝
センサ
2日前
株式会社東芝
センサ
26日前
株式会社FRPカジ
FRP装置
13日前
株式会社精工技研
光電圧プローブ
3日前
株式会社カワタ
サンプリング装置
6日前
TDK株式会社
ガスセンサ
5日前
大和製衡株式会社
組合せ計量装置
13日前
株式会社田中設備
報知装置
1か月前
学校法人立命館
液面レベルセンサ
10日前
富士レビオ株式会社
嵌合システム
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ