TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112425
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006630
出願日
2024-01-19
発明の名称
車両制御システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250725BHJP(信号)
要約
【課題】特定物標の位置の誤検知を抑制可能な車両制御システムを提供する。
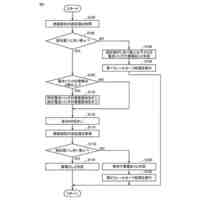
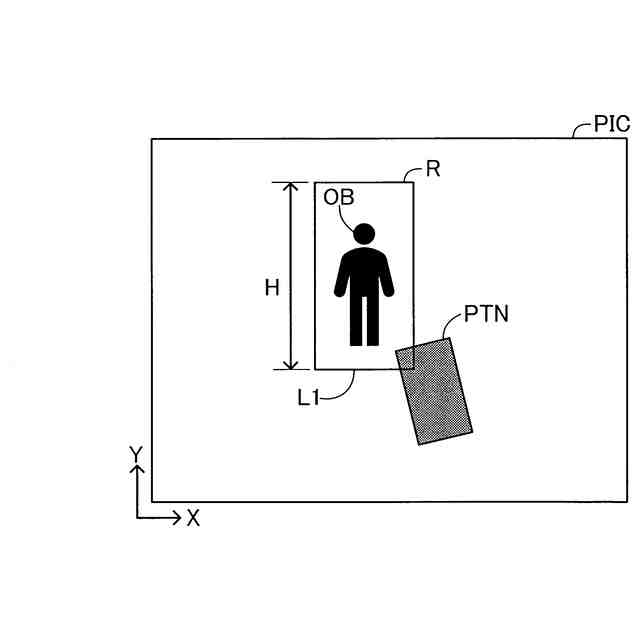
【解決手段】車両制御システムは、自車両の周辺の路面に所定の図形を投影するプロジェクション装置と、自車両の周辺領域を撮影して得られた周辺画像に基づいて自車両の周辺に位置する特定物標OBを認識して自車両と当該特定物標OBとの相対位置に関する情報を出力する物標認識装置と、プロジェクション装置及び物標認識装置を制御するプロセッサと、を備える。前記プロセッサは、前記周辺画像内の前記特定物標であると認識された領域である物標認識画像に前記プロジェクション装置により前記路面に投影された図形画像が重なっている場合に、前記位置情報から取得された前記相対位置を補正する所定の補正処理を実行する。
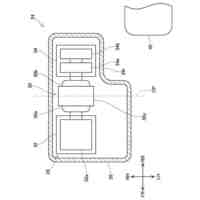
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周辺の路面に所定の図形を投影するプロジェクション装置と、
自車両の周辺領域を撮影して得られた周辺画像に基づいて自車両の周辺に位置する特定物標を認識して自車両と当該特定物標との相対位置に関する情報である位置情報を出力する物標認識装置と、
前記プロジェクション装置及び前記物標認識装置を制御するプロセッサと、
を備えた車両制御システムであって、
前記プロセッサは、前記周辺画像内の前記特定物標であると認識された領域の画像である物標認識画像に前記プロジェクション装置により前記路面に投影された図形画像が重なっている場合に、前記位置情報から取得された前記相対位置を補正する所定の補正処理を実行する、ように構成された車両制御システム。
続きを表示(約 870 文字)
【請求項2】
請求項1に記載の車両制御システムにおいて、
自車両と前記特定物標との位置関係が同一であるときに前記物標認識装置から出力された前記位置情報からそれぞれ取得された第一位置及び第二位置であって、前記物標認識画像に前記図形画像が重なっている第一状態であるときに出力された前記位置情報から取得された自車両に対する前記特定物標の位置である第一位置と、前記物標認識画像に前記図形画像が重なっていない第二状態であるときに出力された前記位置情報から取得された自車両に対する前記特定物標の位置である第二位置と、の偏差量が規定された位置偏差マップを備え、
前記補正処理は、前記位置偏差マップに基づいて、前記第一状態であるときに取得された前記第一位置を補正する処理を含む、車両制御システム。
【請求項3】
請求項2に記載の車両制御システムにおいて、
前記位置偏差マップは、前記物標認識画像の画像サイズと、前記周辺画像の輝度と、前記第一位置と、の少なくとも一つに応じて選択される複数の位置偏差テーブルを備える、車両制御システム。
【請求項4】
請求項2に記載の車両制御システムにおいて、
前記プロセッサは、前記第一位置、前記周辺画像の輝度及び前記物標認識画像の画像サイズを取得し、
前記位置偏差マップは、前記第一位置に応じて選択される複数の位置別テーブルを備え、
各位置別テーブルは、前記周辺画像の輝度に応じて選択される複数の輝度別テーブルを備え、
各輝度別テーブルは、前記画像サイズに応じて選択される複数の前記偏差量が規定されたサイズ別テーブルを備える、車両制御システム。
【請求項5】
請求項1乃至4のいずれか1項に記載の車両制御システムにおいて、
前記物標認識画像は矩形画像であり、
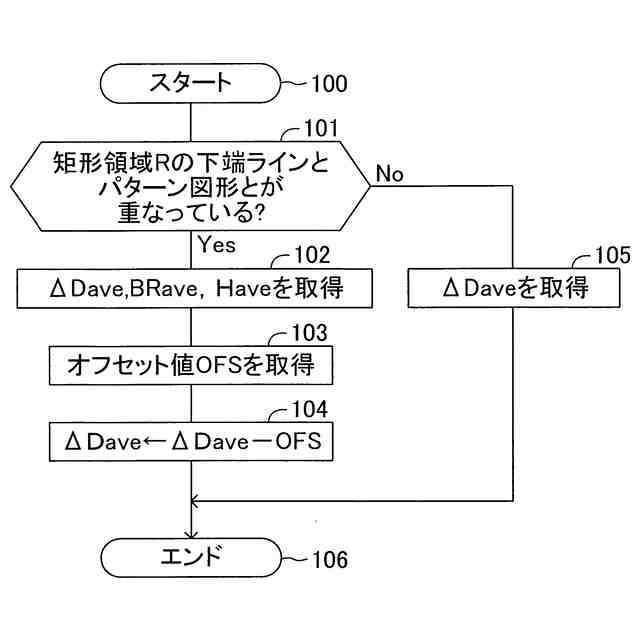
前記プロセッサは、前記物標認識画像の下端ラインに前記図形画像が重なっている場合に、前記補正処理を実行する、車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の周辺の路面に所定の図形を投影するプロジェクション装置、及び、自車両の周辺領域を撮影して得られた画像に基づいて、自車両の周辺に位置する特定物標の位置(自車両と特定物標との距離)を検知する物標認識装置を含む車両制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自車両の周辺の路面に所定の図形を投影するプロジェクション装置が提案されている(例えば、下記特許文献1を参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2021-127071号公報
【発明の概要】
【0004】
ところで、自車両の周辺領域を撮影して得られた周辺画像を解析して(学習済データに基づいて)、特定物標(例えば、歩行者)を認識し、当該物標の位置(自車両と当該特定物標との距離)を取得する物標認識装置が周知である。特定物標が、路面に投影された図形内に入り込んだ場合、又は特定物標が図形の近傍に位置している場合、プロジェクション装置のビーム(直接光又は反射光)が特定物標の一部に照射されることにより、周辺画像において、当該特定物標の画像の一部が不鮮明になる場合がある。この場合、当該周辺画像において、物標認識装置が特定物標であると認識した領域の精度が低く、当該領域の座標に基づいて取得された位置情報の精度(正確度)が低くなる。
【0005】
本発明の目的の1つは、自車両の周辺の路面に所定の図形を投影するプロジェクション装置、及び、自車両の周辺領域の画像に基づいて、当該領域に位置する特定物標の位置(自車両と特定物標との距離)を検知する物標認識装置を含む車両制御システムであって、特定物標の位置の検知精度の低下を抑制可能な車両制御システムを提供することにある。
【0006】
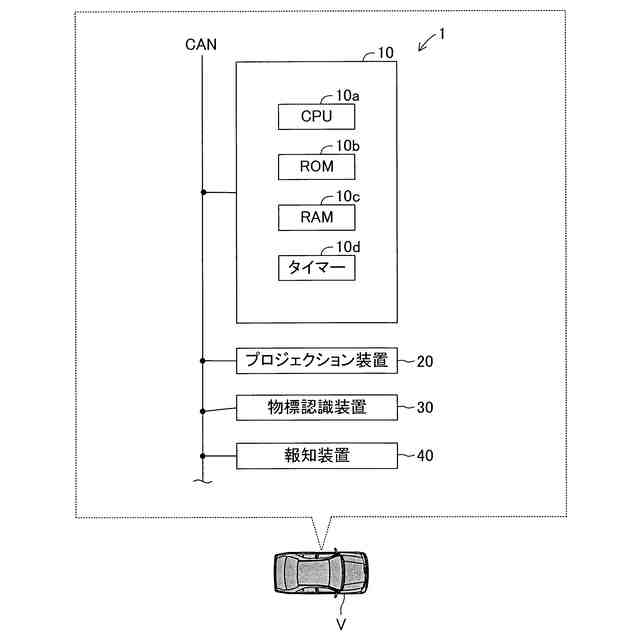
上記課題を解決するために、本発明の車両制御システム(1)は、
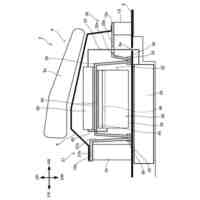
自車両の周辺の路面に所定の図形を投影するプロジェクション装置(20)と、
自車両の周辺領域を撮影して得られた周辺画像に基づいて自車両の周辺に位置する特定物標を認識して自車両と当該特定物標との相対位置に関する情報である位置情報を出力する物標認識装置(30)と、
前記プロジェクション装置及び前記物標認識装置を制御するプロセッサ(10)と、
を備える。
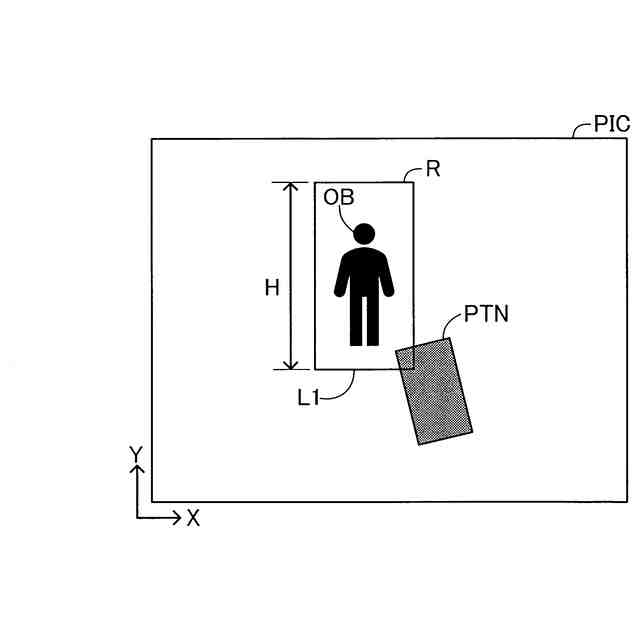
前記プロセッサは、前記周辺画像内の前記特定物標であると認識された領域の画像である物標認識画像(R)と前記プロジェクション装置により前記路面に投影された図形画像(PTN)とが重なっている場合に、前記位置情報から取得された前記相対位置を補正する所定の補正処理を実行する、ように構成される。
【0007】
本発明に係る車両制御システムは、自車両の周辺の路面に所定の図形を投影するプロジェクション装置、及び、周辺画像に基づいて、自車両と特定物標との相対的な位置を表す位置情報を取得する物標認識装置を備える。ここで、物標認識画像(周辺画像において特定物標として認識された領域)と図形画像とが重なっている場合に、位置情報の精度が低い場合がある。本発明に係る車両制御システムによれば、両画像が重なっている場合に、所定の補正処理により位置情報から取得される自車両に対する特定物標の位置である相対位置が補正される。これにより、自車両に対する特定物標の位置の検知精度の低下が抑制される。
【0008】
本発明の一態様に係る車両制御システムにおいて、
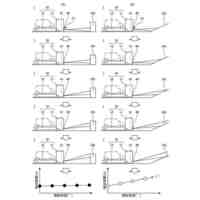
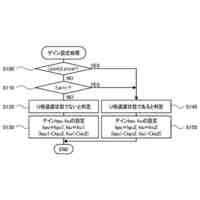
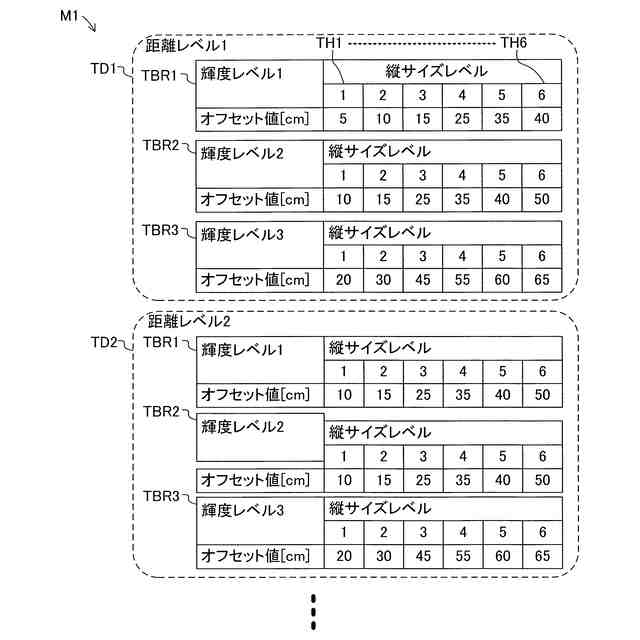
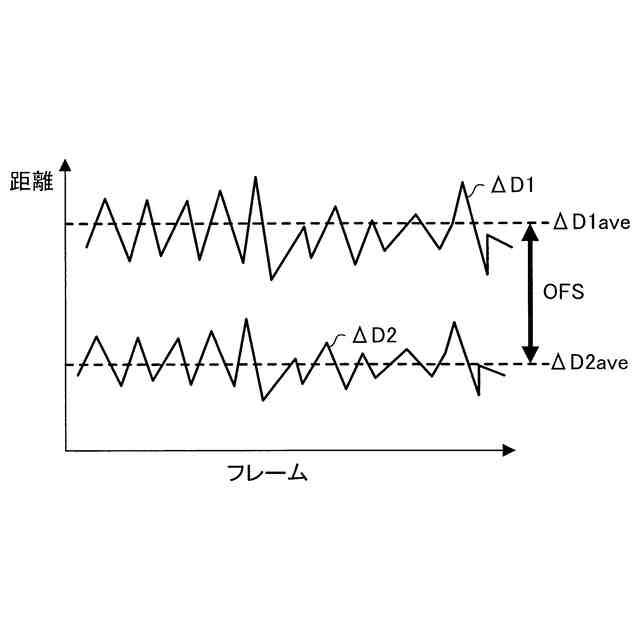
自車両と前記特定物標との位置関係が同一であるときに前記物標認識装置から出力された前記位置情報からそれぞれ取得された第一位置(ΔD1ave)及び第二位置(ΔD2ave)であって、前記物標認識画像に前記図形画像が重なっている第一状態であるときに出力された前記位置情報から取得された自車両に対する前記特定物標の位置である第一位置と、前記物標認識画像に前記図形画像が重なっていない第二状態であるときに出力された前記位置情報から取得された自車両に対する前記特定物標の位置である第二位置と、の偏差量が規定された位置偏差マップ)(M1)を備え、
前記補正処理は、前記位置偏差マップに基づいて、前記第一状態であるときに取得された前記第一位置(ΔD1ave)を補正する処理を含む。
【0009】
これによれば、プロセッサは、第一状態において、比較的簡単に、自車両に対する特定物標の位置を補正できる。
【0010】
本発明の他の態様に係る車両制御システムにおいて、
前記位置偏差マップは、前記物標認識画像の画像サイズと、前記周辺画像の輝度と、前記第一位置と、の少なくとも一つに応じて選択される複数の位置偏差テーブルを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
電池
14日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
電池
24日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
モータ
19日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
ロータ
19日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
光電極
26日前
トヨタ自動車株式会社
ロータ
28日前
トヨタ自動車株式会社
電動車
28日前
トヨタ自動車株式会社
電動車
28日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
減圧弁
28日前
トヨタ自動車株式会社
負極層
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ