TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025108156
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2024001878
出願日
2024-01-10
発明の名称
関節ユニット
出願人
株式会社ソニー・インタラクティブエンタテインメント
代理人
弁理士法人はるか国際特許事務所
主分類
B25J
17/00 20060101AFI20250715BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】関節ユニットにおいてシンプルな構造のギアでバックラッシが大きくなることを抑制する。
【解決手段】関節ユニット(1A,1B)は、2つの対向ギア(2)と中間ギア(3)とのうちのいずれかのギアである第1ギアを回転可能に支持している第1軸(5,210)と、第1ギアと第1軸(5,210)との間に配置されている軸受け(61)と、弾性部材(80,250)と、を有してよい。第1ギアは、第1軸(5,210)に規定されている第1軸線(Ax1)に沿った方向において軸受け(61)と対向している対向面(33a)を有してよい。弾性部材(80,250)は、軸受け(61)を介して対向面(33a)を第1軸線(Ax1)に沿った方向に付勢してよい。
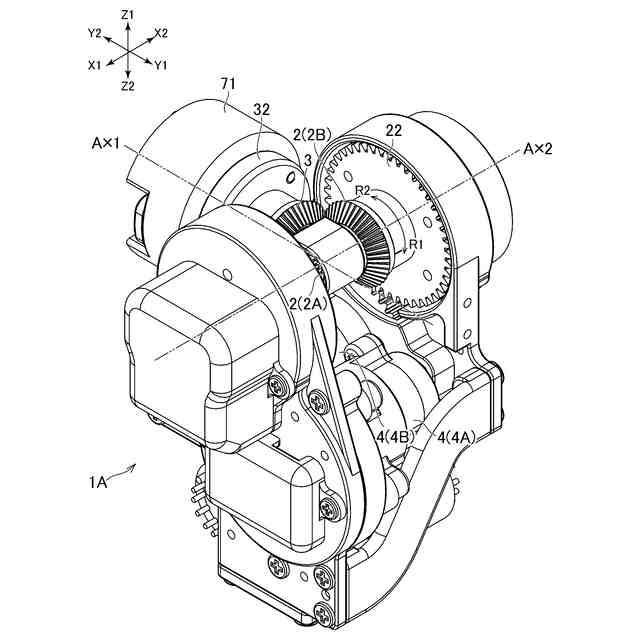
【選択図】図1
特許請求の範囲
【請求項1】
対向する2つの傘歯ギアである2つの対向ギアと、
前記2つの対向ギアの双方に噛み合う傘歯ギアである中間ギアと、
前記2つの対向ギアと前記中間ギアとのうちのいずれかのギアである第1ギアを回転可能に支持している第1軸と、
前記第1ギアと前記第1軸との間に配置されている軸受けと、
弾性部材と、を有し、
前記第1ギアは、前記第1軸に規定されている第1軸線に沿った方向において前記軸受けと対向している対向面を有し、
前記弾性部材は、前記軸受けを介して前記対向面を前記第1軸線に沿った方向に付勢する
関節ユニット。
続きを表示(約 1,400 文字)
【請求項2】
前記軸受けは、前記第1軸に接している内周部と、前記第1ギアに接している外周部と、を有し、
前記弾性部材は、前記軸受けの前記内周部を付勢し、
前記軸受けの前記外周部は、前記対向面を付勢する
請求項1に記載される関節ユニット。
【請求項3】
前記第1軸に固定されている第1固定部材を更に有し、
前記弾性部材は、前記第1固定部材と前記軸受けとの間に配置されている
請求項1に記載される関節ユニット。
【請求項4】
前記2つの対向ギアと前記中間ギアとのうちの前記第1ギアとは異なるギアである第2ギアを回転可能に支持している第2軸と、
前記第1軸に固定されている第1固定部材と、を更に有し、
前記第1軸線は、前記第2軸に規定されている第2軸線に対して交差し、
前記第1固定部材は、前記第1軸線に沿った方向で前記軸受けを挟んで前記対向面の反対側に位置し、
前記第1軸及び前記第1固定部材は、前記第2軸に対し、前記第1軸線に沿った方向に動くことができ、
前記弾性部材は、前記第1軸を付勢する
請求項1に記載される関節ユニット。
【請求項5】
前記第1軸に固定されている第2固定部材を更に有し、
前記第2固定部材は、前記第1軸線に沿った方向で前記軸受けを挟んで前記第1固定部材の反対側に配置されており、
前記弾性部材は、前記軸受けと前記第2固定部材との間に配置されており、
前記弾性部材は、前記軸受けから離れる方向に前記第2固定部材を付勢する
請求項4に記載される関節ユニット。
【請求項6】
前記第1ギア及び前記軸受けは、弾性部材の変形量よりも短い距離でのみ、前記第1軸線に沿った方向での動きが許容されている
請求項1に記載される関節ユニット。
【請求項7】
前記第1固定部材は、前記第1軸の端部に固定されている被固定部と、前記被固定部から前記軸受けに向けて延びている延伸部とを有し、
前記第1ギア及び前記軸受けが前記第1軸線に沿った方向で移動できる距離は、前記延伸部の端面によって制限されている
請求項3に記載される関節ユニット。
【請求項8】
前記端面と前記軸受けとの間に配置され、且つ前記端面と前記軸受けとの間で前記第1軸線に沿って動くことができる可動部材を更に有し、
前記第1ギア及び前記軸受けが前記第1軸線に沿った方向で移動できる距離は、前記端面と前記可動部材との間の隙間の範囲内に制限されている
請求項7に記載される関節ユニット。
【請求項9】
前記第1軸に対する前記第1ギアの相対的な回転角度を検出する回転センサを更に有し、
前記回転センサは、前記第1軸の端部に固定されているセンサ固定部と、前記第1軸線に沿った方向でセンサ固定部と対向し、且つ前記第1ギアとともに回転するセンサ回転部とを有し、
前記第1固定部材は、前記センサ固定部を支持している
請求項7に記載される関節ユニット。
【請求項10】
前記第1固定部材は、前記軸受けが配置さている方向に開口している凹部を有しており、
前記弾性部材は、前記凹部に収納されている
請求項7に記載される関節ユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は関節ユニットに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
下記特許文献1には、ロボット等のアームを動かすことができる関節ユニットが開示されている。関節ユニットは、各々が互いに向き合っている2つの傘歯ギアである対向ギアと、2つの対向ギアの間に配置される傘歯ギアである中間ギアとを有している。中間ギアの歯は、2つの対向ギアの歯と噛み合っている。2つの対向ギアは互いに異なるモータの動力を受け、互いに独立して回転可能である。2つの対向ギアが互いに異なる方向に回転する場合(例えば、一方が時計回りに回転し、他方が反時計回りに回転する場合)、中間ギアは、中間ギアの軸線を中心に回転する。また、2つの対向ギアが同じ方向に回転する場合(例えば、2つのギアの双方が時計回りに回転する場合、又は2つのギアの双方が反時計回りに回転する場合)、中間ギアは、対向ギアの軸線を中心に回転移動する。この2種類の中間ギアの動きにより、中間ギアに接続されるアームなどの部材を2方向(例えば、前後方向及び左右方向)に動かすことが可能である。
【先行技術文献】
【特許文献】
【0003】
特開2022-153045号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
対向ギアと中間ギアとで歯と歯の間の隙間(バックラッシ)が大きい場合、対向ギアが回転を開始した際に、対向ギアの歯と中間ギアとの歯との衝突が生じる。このことが、騒音や振動が発生する原因になる。この点、上記特許文献1の構成では、対向ギアの内周部分を構成する部材が、対向ギアの外周部分を構成する部材に対して分離することができる。そして、これらの部材の間に弾性部材を配置し、対向ギアの内周部分を構成する部材を弾性部材で付勢することにより、対向ギアと中間ギアとのバックラッシが大きくなることを抑制している。しかしながら、対向ギアを2つの部材で構成しており、対向ギアの構造が複雑である。
【0005】
本開示の目的は、シンプルな構造のギアでバックラッシが大きくなることを抑制することである。
【課題を解決するための手段】
【0006】
関節ユニットは、対向する2つの傘歯ギアである2つの対向ギアと、前記2つの対向ギアの双方に噛み合う傘歯ギアである中間ギアと、前記2つの対向ギアと前記中間ギアとのうちのいずれかのギアである第1ギアを回転可能に支持している第1軸と、前記第1ギアと前記第1軸との間に配置されている軸受けと、弾性部材と、を有してよい。前記第1ギアは、前記第1軸に規定されている第1軸線に沿った方向において前記軸受けと対向している対向面を有してよい。前記弾性部材は、前記軸受けを介して前記対向面を前記第1軸線に沿った方向に付勢してよい。これによれば、シンプルな構造のギアでバックラッシが大きくなることを抑制できる。
【図面の簡単な説明】
【0007】
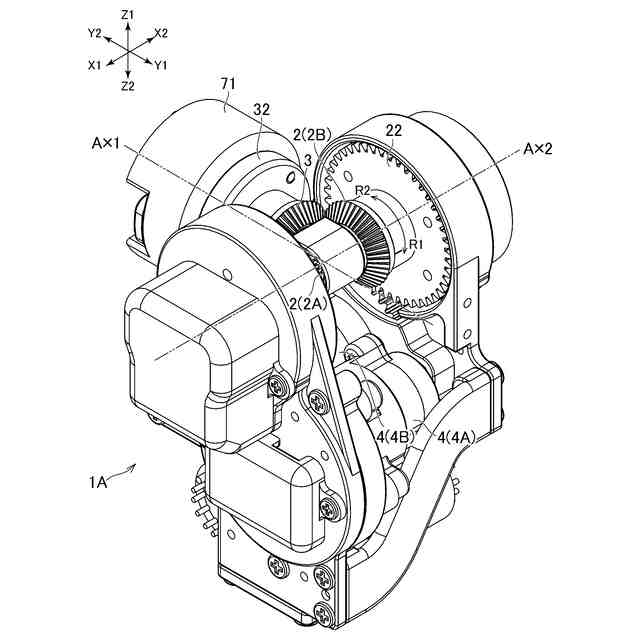
本開示で提案する第1の実施形態に係る関節ユニットを示す斜視図である。
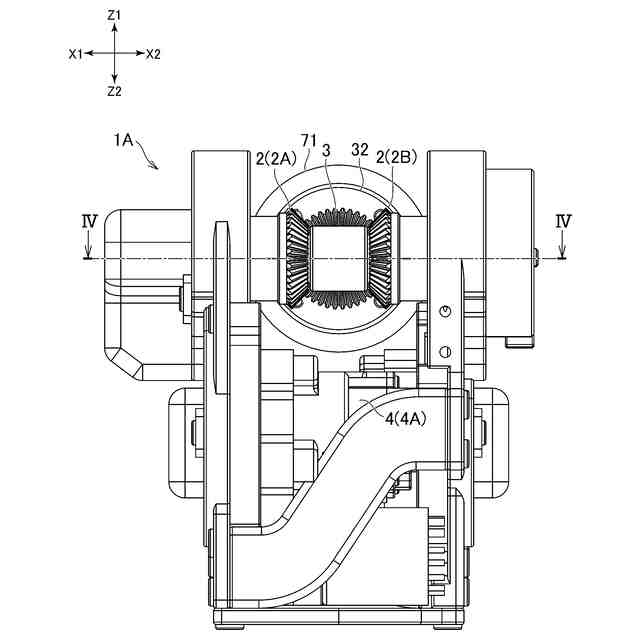
第1の実施形態に係る関節ユニットを示す正面図である。
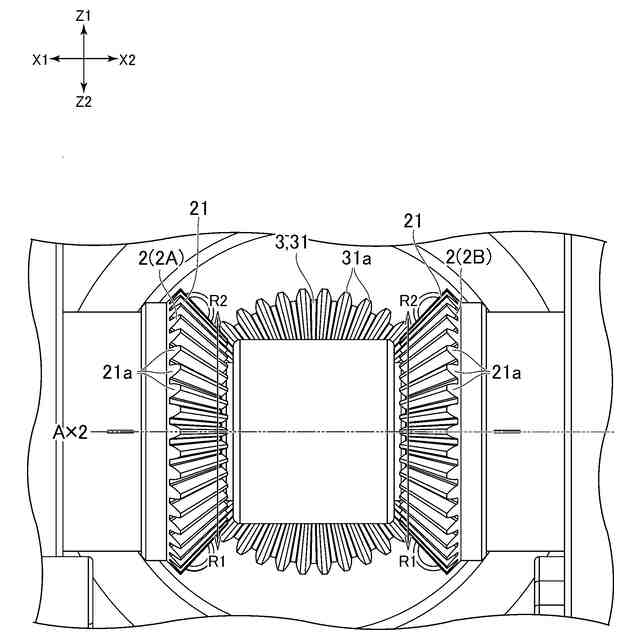
図2の部分拡大図である。
図2のIV‐IV線における断面を示す断面図である。
図4の部分拡大図である。
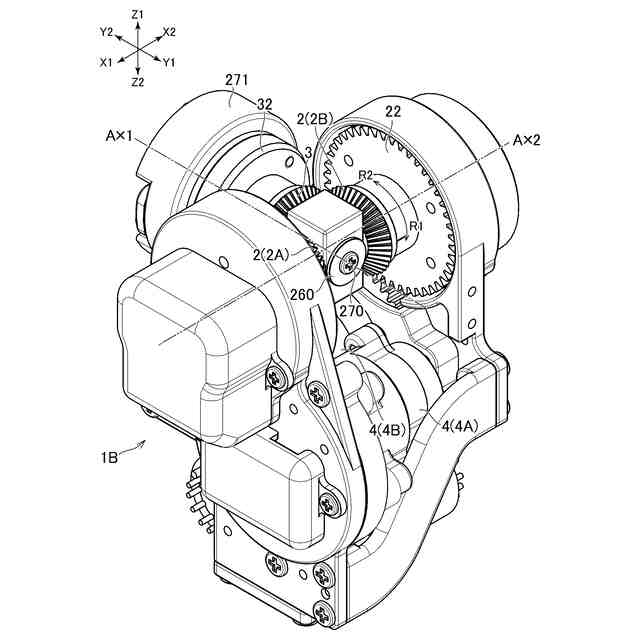
本開示で提案する第2の実施形態に係る関節ユニットを示す斜視図である。
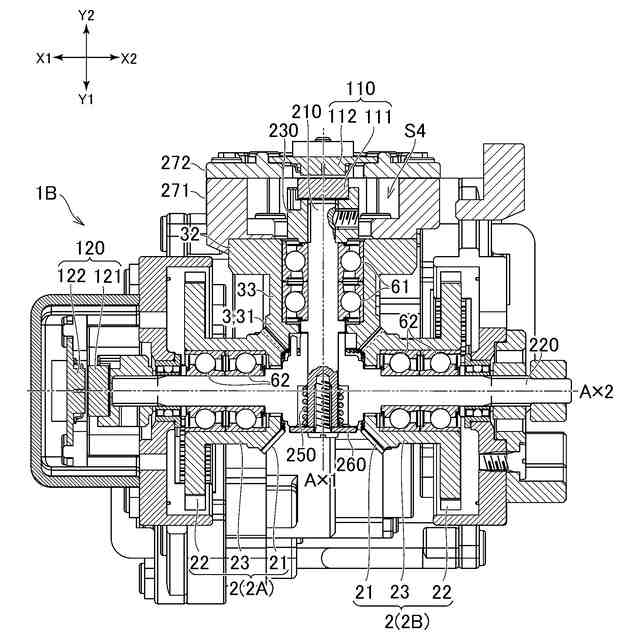
第2実施形態に係る関節ユニットの断面を示す断面図である。
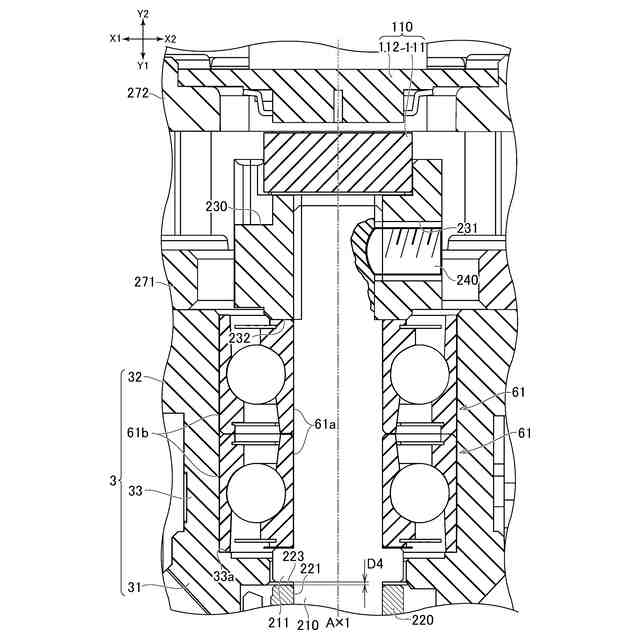
図7の部分拡大図である。
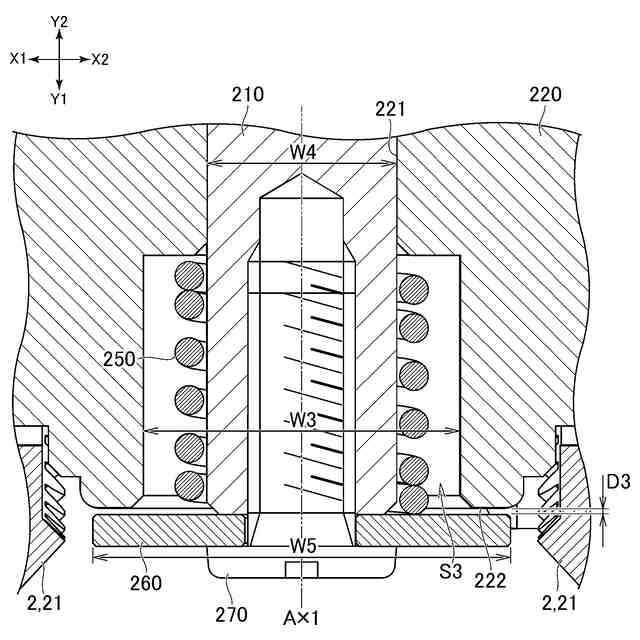
図7の部分拡大図である。
変形例に係る関節ユニットの一部分の断面を示す断面図である。
【発明を実施するための形態】
【0008】
[1.第1の実施形態]
はじめに、本開示で提案する第1の実施形態について図面を参照しながら説明する。図1は、第1の実施形態に係る関節ユニット1Aを示す斜視図である。図2は、関節ユニット1Aの正面図である。図3は図2の部分拡大図であり、関節ユニット1Aに設けられる2つの対向ギア2(2A,2B)と、中間ギア3を示している。以下の説明では、各図に示すX1及びX2をそれぞれ左方及び右方と称し、Y1及びY2をそれぞれ前方及び後方と称し、Z1及びZ2をそれぞれ上方及び下方と称する。
【0009】
[1-1.関節ユニットの概要]
関節ユニット1Aは、ロボットのアームを動かすためにロボットに取り付けられてよい。関節ユニット1Aは、例えば、人又は動物を模したロボットに取り付けられ、ロボットの腕、足、首、腰などを動かす関節として機能する。
【0010】
図1及び図2に示すように、関節ユニット1Aは、互いに対向する2つの傘歯ギアである2つの対向ギア2(2A及び2B)と、これら2つの対向ギア2の双方に噛み合う傘歯ギアである中間ギア3とを有してよい。図1及び図2に示した例では、左右方向において2つの対向ギア2が対向している。そして、中間ギア3は、左右方向において2つの対向ギア2の間に配置されている。対向ギア2Aは、中間ギア3の左方に位置している。対向ギア2Bは、中間ギア3の右方に位置している。これに限らず、2つの対向ギア2は、中間ギア3を挟んで上下方向において対向してもよいし、左右且つ上下の斜め方向において対向してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社スター精機
産業用ロボット
2か月前
積水ハウス株式会社
フィルム除去具
3日前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
8日前
株式会社ジャノメ
ロボット
2か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
株式会社ダイヘン
ロボット制御システム
2か月前
株式会社清水製作所
電動工具の吊下げ具
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































