TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105289
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223744
出願日
2023-12-29
発明の名称
ナビゲーションシステム
出願人
株式会社オーイーシー
代理人
個人
,
個人
主分類
G01C
21/26 20060101AFI20250703BHJP(測定;試験)
要約
【課題】ゴミ回収業者、郵便や宅配業者が業務を行う際に、あらかじめ指定されたポイントに到達したか否かの確認を行うことが可能なナビゲーションシステムにおける検知機能を提供する。
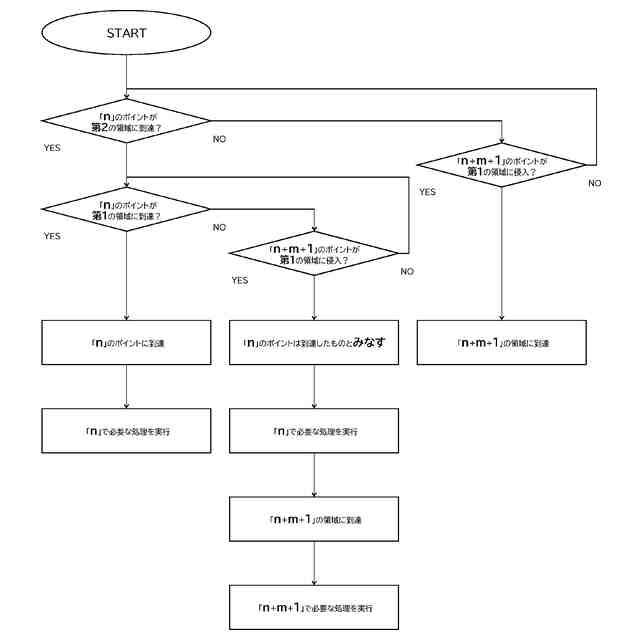
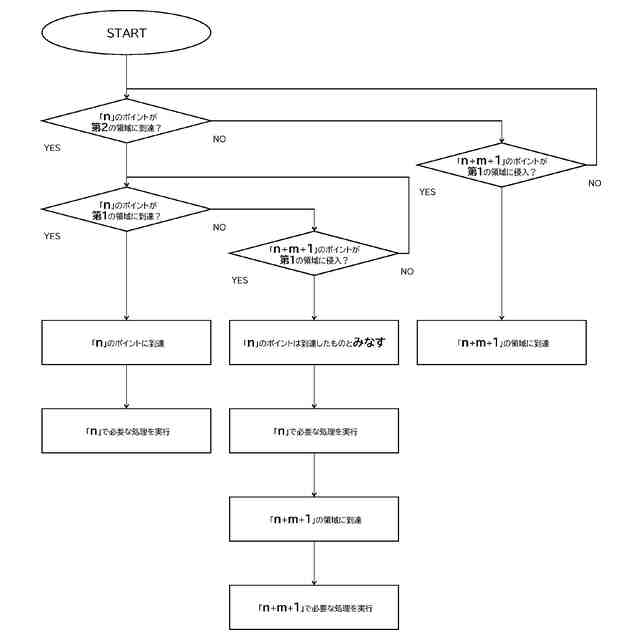
【解決手段】車両を中心とする所定半径の円で構成される第1の検出領域及び車両を中心とする半径が第1の検出領域よりも広い円で構成される第2の検出領域内に案内位置座標が存在するか否かによってナビゲーションの有無を判断する。このとき、n番目からn+m番目(m≧1)に検知されるべき全ての位置座標が、第2の検出領域内に侵入したが、n番目からn+m番目に検知されるべき全ての位置座標が第1の検出領域に侵入せず、n+m+1番目に検知されるべき位置座標が第1の検出領域に侵入した時には、n番目からn+m番目に検知されるべき全ての位置座標に到達したとみなすとともに、n+m+1番目に検知されるべき位置座標に到達したと判断し必要な処理を実行する。
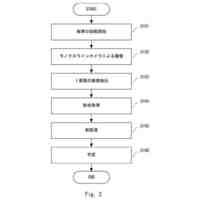
【選択図】図2
特許請求の範囲
【請求項1】
ナビゲーションファイルに格納されるナビゲーション情報及び特定指示情報に基づいて、車両を運転するユーザに必要な案内指示を行うナビゲーションシステムにおいて、
前記ナビゲーション情報は、前記車両が走行する走行ルート上でかつナビゲーションが必要な位置における位置座標のみで構成され、
前記特定指示情報は、前記車両に対し、所定の指示を出すために必要な位置における位置座標である特定位置座標のみで構成されるとともに、検知される順番に前記位置座標がソートされ、
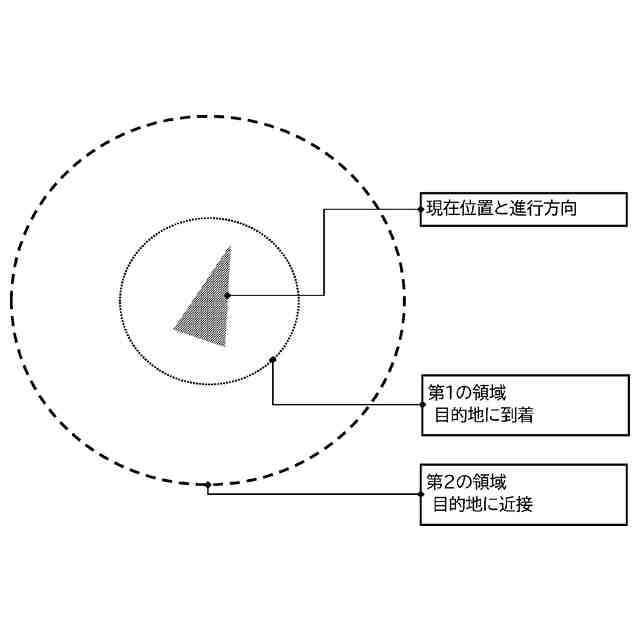
前記車両を中心とする所定半径の円で構成される第1の検出領域及び前記車両を中心とする、半径が前記第1の検出領域よりも広い円で構成される第2の検出領域内に、前記特定位置座標が存在するか否かによってナビゲーションの有無を判断し、
n番目(特定位置座標の個数≧n≧1)に検知されるべき特定位置座標が前記第2の検出領域内に侵入し、かつ、n番目に検知されるべき特定位置座標が前記第1の検出領域に侵入したときには、n番目に検知されるべき特定位置座標に到達したと判断し、必要な処理を実行し、
n番目(特定位置座標の個数≧n≧1)に検知されるべき特定位置座標が前記第2の検出領域内に侵入したが、n番目に検知されるべき特定位置座標が前記第1の検出領域に侵入せず、n+1番目(特定位置座標の個数≧n+1≧1)に検知されるべき位置座標が前記第1の検出領域に侵入したときには、n番目に検知されるべき特定位置座標に到達したとみなし、必要な処理を実行するとともに、n+1番目に検知されるべき位置座標に到達したと判断し必要な処理を実行するナビゲーションシステム。
続きを表示(約 310 文字)
【請求項2】
n番目(特定位置座標の個数≧n≧1)からn+m番目(特定位置座標の個数≧n+m≧1)に検知されるべきすべての特定位置座標が、それぞれ前記第2の検出領域内に侵入したが、n番目からn+m番目に検知されるべきすべての特定位置座標が前記第1の検出領域に侵入せず、n+m+1番目(特定位置座標の個数≧n+m+1≧1)に検知されるべき特定位置座標が前記第1の検出領域に侵入したときには、n番目からn+m番目に検知されるべきすべての特定位置座標に到達したとみなし、必要な処理を実行するとともに、n+m+1番目に検知されるべき特定位置座標に到達したと判断し必要な処理を実行する請求項1に記載のナビゲーションシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ナビゲーションシステムにおいて所定の指示を出すために必要な位置への到着を検知する(もしくは到着したものとみなす)技術で、例えば、ゴミ回収業者、郵便や宅配業者が業務を行う際に、あらかじめ指定されたポイントに到達したか否かの確認を行うことが可能なナビゲーションシステムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
車両用のナビゲーションシステムにおいて、車両の現在位置を検出する際に、車両の走行路と地図情報とを比較するマップマッチング処理によって検出精度を向上させることに主力が置かれている。その上で、特許文献1のように、マップマッチング処理の精度について、マッチング対象の走行路が長いほど精度が向上することや、特許文献2のように、AI技術を活用したナビゲーションシステムが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2009-250718号公報
特開2022-132882号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来のナビゲーションシステムでは、あらかじめ指定されたポイントに到達したか否かの確認方法として、ナビゲーションシステムにあらかじめ、停車ポイント(目的地)を設定し、その停車ポイントに向けて車両を走行させることが行われていた。
この方法の場合、車両が侵入することができない地点に停車ポイントが設定された場合には、車両が停車ポイントに到達することができないため、ナビゲーションシステム上では、人為的に到着したものとして処理しない限り、目的地に一番近いナビゲーションポイントとして設定し、目的地付近に到着した旨を通知する。このため、数メートルから数十メートルといった短い距離で、ゴミ収集や郵便配達といった一度に大量の停車ポイント(目的地)を巡回するナビゲーションシステムでの利用は不適であった。
【0005】
そこで、発明者は、この問題を解決するためには、車両と目的ポイントとの位置関係と、ナビゲーション処理のフローに着目し、検出領域を、通常のナビゲーションで検知できる第1の検出領域と、当該領域よりも広い第2の検出領域とに分けて、第1の検出領域の領域で検出できなくても、特定の条件下において第2の検出領域で検出できたときに、所定の指示がなされたとみなすことにより、この問題を解決することができることを知見し、本発明を完成させた。
本発明は、ゴミ収集や郵便配達といった一度に大量の停車ポイント(目的地)を巡回するナビゲーションシステムでの利用を目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、ナビゲーションファイルに格納されるナビゲーション情報及び特定指示情報に基づいて、車両を運転するユーザに必要な案内指示を行うナビゲーションシステムにおいて、前記ナビゲーション情報は、前記車両が走行する走行ルート上でかつナビゲーションが必要な位置における位置座標のみで構成され、前記特定指示情報は、前記車両に対し、所定の指示を出すために必要な位置における位置座標である特定位置座標のみで構成されるとともに、検知される順番に前記位置座標がソートされ、前記車両を中心とする所定半径の円で構成される第1の検出領域及び前記車両を中心とする、半径が前記第1の検出領域よりも広い円で構成される第2の検出領域内に、前記特定位置座標が存在するか否かによってナビゲーションの有無を判断し、n番目(特定位置座標の個数≧n≧1)に検知されるべき特定位置座標が前記第2の検出領域内に侵入し、かつ、n番目に検知されるべき特定位置座標が前記第1の検出領域に侵入したときには、n番目に検知されるべき特定位置座標に到達したと判断し、必要な処理を実行し、n番目(特定位置座標の個数≧n≧1)に検知されるべき特定位置座標が前記第2の検出領域内に侵入したが、n番目に検知されるべき特定位置座標が前記第1の検出領域に侵入せず、n+1番目(特定位置座標の個数≧n+1≧1)に検知されるべき位置座標が前記第1の検出領域に侵入したときには、n番目に検知されるべき特定位置座標に到達したとみなし、必要な処理を実行するとともに、n+1番目に検知されるべき位置座標に到達したと判断し必要な処理を実行するナビゲーションシステムである。
【0007】
本発明によれば、ナビゲーションファイルに格納されている情報はナビゲーションが必要な位置の位置座標のみであり、また、特定指示情報は、前記車両に対し、所定の指示を出すために必要な位置における位置座標のみであり、ナビゲーション専用の地図データは用いない。
したがって、経時的に変化する地図データを更新するなど、新しい情報を追加する必要がなく、車両を運転するユーザに必要な案内指示を行うことができる。
特に、複雑なルートや、同じ地点を何度も走行する業務用車両の場合であっても、位置座標の設定さえ適切に設定されていれば、ナビゲーションシステムとして利用することができる。
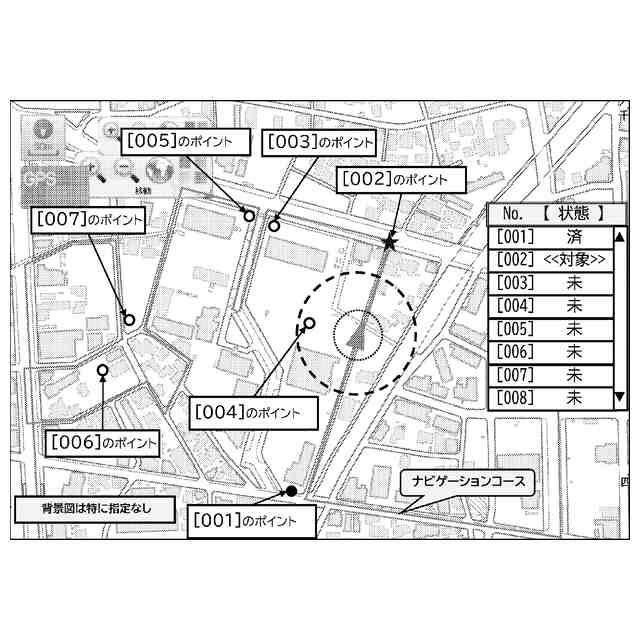
そのうえで、1番目に検知されるべき位置座標から順に、第1、第2の検出領域に侵入したか判定し、それぞれ侵入したときに必要な処理を行う。このとき、次に検知すべきポイントがn番目(位置座標の個数≧n≧1)の位置座標が第1の検出領域に侵入したときには、n番目に検知されるべき位置座標に到達したと判断し、必要な処理(例えば、目的地に到着したことをアナウンスする等)を実行する。例えば、3番目に検知されるべき位置座標が第1の検出領域に侵入したときには、3番目に検知されるべき位置座標に到達したと判断し、目的地に到達したことをシステム上及び音声でアナウンスする。
また、n番目(位置座標の個数≧n≧1)に検知されるべき位置座標が第2の検出領域内に侵入したものの、n番目に検知されるべき位置座標が第1の検出領域に侵入せず、n+1番目(位置座標の個数≧n+1≧1)に検知されるべき位置座標が第1の検出領域に侵入したときには、n番目に検知されるべき位置座標に到達したとみなし、必要な処理を実行するとともに、n+1番目に検知されるべき位置座標に到達したと判断し必要な処理を実行する。つまり、n番目に検知されるべき位置座標の探索を打ち切り、n+1番目に検知されるべき位置座標に到達したと判断し必要な処理を実行する。たとえば、3番目に検知されるべき位置座標が第2の検出領域内に侵入したものの、3番目に検知されるべき位置座標が第1の検出領域に侵入せず、4番目に検知されるべき位置座標が第1の検出領域に侵入したときには、3番目に検知されるべき位置座標の探索を打ち切り、4番目に検知されるべき位置座標に到達したと判断し必要な処理を実行する。
これにより、車で侵入することができない地点を目標地点においたとき、第1の検出領域で検出できなくても、第2の検出領域で検出できたときに、所定の指示がなされたとみなすことができ、当該位置座標を探し続けることになく、次のポイントの探索が可能となる。
【0008】
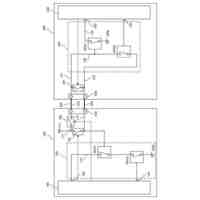
ナビゲーションシステムでは、外部からプローブ情報(GPS情報)を受信する受信端末、プローブ情報から車両の位置情報(経緯度)を抽出し、案内指示を行う座標との離間距離を求める離間距離演算部、案内指示の内容を判断し、車両を運転するユーザに案内指示を行う案内部とを有している。
【0009】
第1の検出領域・第2の検出領域に目標となる位置情報が存在するか否かの判断手法は、座標上で判断し、車両を中心に第1の検出領域・第2の検出領域を設け、それぞれの領域に位置座標が位置するか否かで判断する。
【0010】
請求項2に記載の発明は、n番目(特定位置座標の個数≧n≧1)からn+m番目(特定位置座標の個数≧n+m≧1)に検知されるべきすべての特定位置座標が、それぞれ前記第2の検出領域内に侵入したが、n番目からn+m番目に検知されるべきすべての特定位置座標が前記第1の検出領域に侵入せず、n+m+1番目(特定位置座標の個数≧n+m+1≧1)に検知されるべき特定位置座標が前記第1の検出領域に侵入したときには、n番目からn+m番目に検知されるべきすべての特定位置座標に到達したとみなし、必要な処理を実行するとともに、n+m+1番目に検知されるべき特定位置座標に到達したと判断し必要な処理を実行する請求項1に記載のナビゲーションシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
9日前
株式会社東光高岳
計器
5日前
株式会社ミツトヨ
測定器
2日前
日本精機株式会社
液面検出装置
11日前
大和製衡株式会社
組合せ秤
17日前
大和製衡株式会社
組合せ秤
11日前
大和製衡株式会社
組合せ秤
11日前
個人
フロートレス液面センサー
24日前
大同特殊鋼株式会社
疵検出方法
2日前
ダイハツ工業株式会社
試験用治具
17日前
日本特殊陶業株式会社
ガスセンサ
23日前
エグゼヴィータ株式会社
端末装置
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
キヤノン株式会社
放射線撮像装置
26日前
富士電機株式会社
エンコーダ
4日前
バイオテック株式会社
容器設置装置
3日前
富士電機株式会社
エンコーダ
4日前
株式会社クボタ
作業車
16日前
柳井電機工業株式会社
部材検査装置
3日前
タカノ株式会社
試料分析装置
2日前
大同特殊鋼株式会社
座標系較正方法
26日前
タカノ株式会社
試料分析装置
2日前
JNC株式会社
トランジスタ型センサ
2日前
JNC株式会社
トランジスタ型センサ
2日前
旭光電機株式会社
漏出検出装置
23日前
TDK株式会社
計測装置
10日前
株式会社フジキン
流量測定装置
18日前
新電元メカトロニクス株式会社
位置検出装置
9日前
トヨタ自動車株式会社
歯車の検査方法
12日前
株式会社ノーリツ
通信システム
9日前
大同特殊鋼株式会社
ラベル色特定方法
26日前
住友化学株式会社
積層基板
23日前
日本電気株式会社
測位装置及びその方法
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ