TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025102003
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219144
出願日
2023-12-26
発明の名称
ロボット遠隔操作システム、遠隔操作制御装置、遠隔操作制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】環境の安全性と人間操作者の操作しやすさを両立して、中断していた遠隔操作を再開できるロボット遠隔操作システム、遠隔操作制御装置、遠隔操作制御方法、およびプログラムを提供することを目的とする。
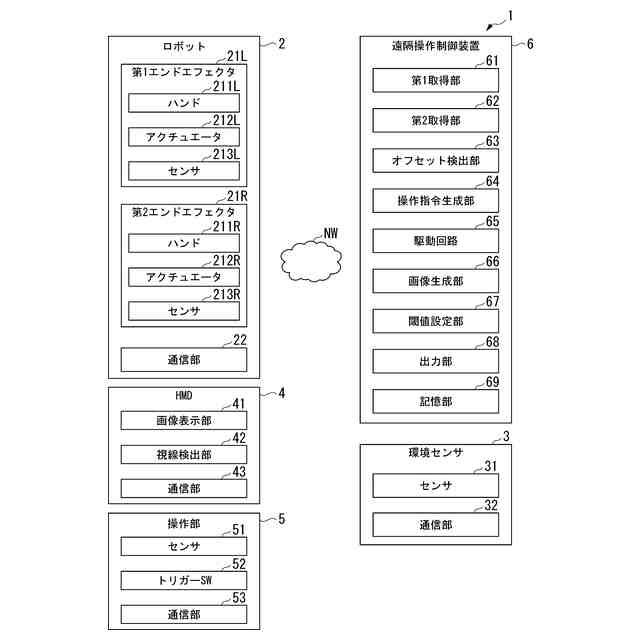
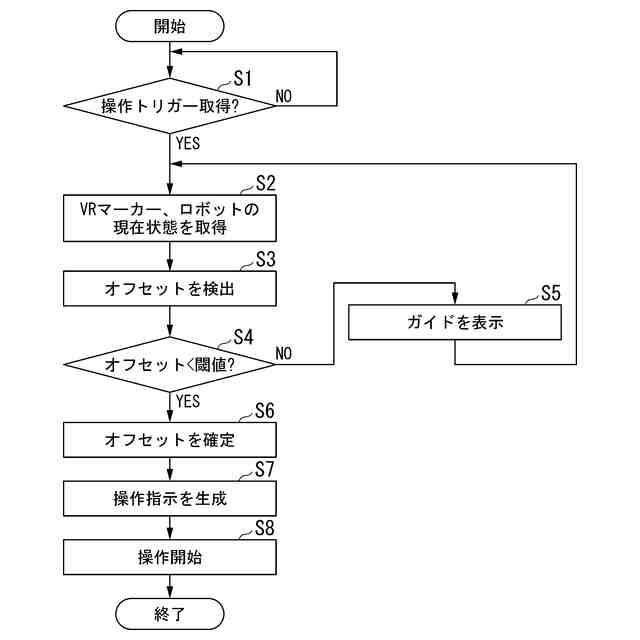
【解決手段】ロボット遠隔操作システムは、遠隔操作されるロボットと、ロボットの状態を取得する第1取得部と、ロボットの操作指令を操作者が入力する操作部と、操作部の操作入力値を取得する第2取得部と、操作入力値から操作指令を生成する操作指令生成部と、を備え、操作指令生成部は、操作入力値に基づく位置と、ロボットの状態の位置が異なる場合、異なる状態をオフセットとして確定し、オフセットした状態を維持したままロボット操作指令を生成する。
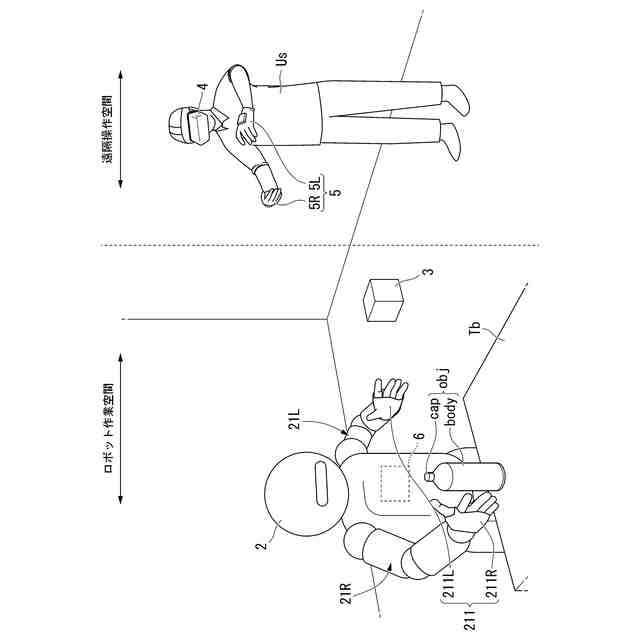
【選択図】図3
特許請求の範囲
【請求項1】
遠隔操作されるロボットと、
前記ロボットの状態を取得する第1取得部と、
前記ロボットの操作指令を操作者が入力する操作部と、
前記操作部の操作入力値を取得する第2取得部と、
前記操作入力値から操作指令を生成する操作指令生成部と、
を備え、
前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置が異なる場合、異なる状態をオフセットとして確定し、前記オフセットした状態を維持したままロボット操作指令を生成する、
ロボット遠隔操作システム。
続きを表示(約 1,700 文字)
【請求項2】
前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置とに閾値以上の乖離がある場合に、前記操作入力値に基づく位置と、前記ロボットの状態の位置とが閾値以内になるまで前記ロボット操作指令を前記ロボットに出力しない、
請求項1に記載のロボット遠隔操作システム。
【請求項3】
前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置との差が、前記閾値未満になった場合に、前記ロボット操作指令を前記ロボットに出力する、
請求項2に記載のロボット遠隔操作システム。
【請求項4】
前記閾値を設定する閾値設定部、をさらに備え、
前記閾値設定部は、前記操作者が自分の手が低いままで、前記ロボットのハンドを高い場所で作業を再開させたい場合、位置の閾値を大きく設定する、
請求項2または請求項3に記載のロボット遠隔操作システム。
【請求項5】
前記閾値を設定する閾値設定部、をさらに備え、
前記閾値設定部は、タスクの種類、前記操作者の年齢、前記操作者の体重、および前記ロボットが有するアームの長さのうちの少なくとも1つに応じて前記閾値を選択する、
請求項2または請求項3に記載のロボット遠隔操作システム。
【請求項6】
前記閾値を設定する閾値設定部、をさらに備え、
前記閾値設定部は、予め設定されている複数の前記閾値を、前記操作者に提示し、前記操作者が複数の前記閾値の中から選択した前記閾値に設定する、
請求項2または請求項3に記載のロボット遠隔操作システム。
【請求項7】
前記第1取得部が取得した前記ロボットの状態と、前記第2取得部が取得した前記ロボットの操作指令とを用いて、前記操作者に提示する画像を生成する画像生成部、をさらに備え、
前記画像生成部は、前記第2取得部が取得した情報と、前記ロボットの状態の位置情報との差が、前記閾値未満となる位置になるために変化させる必要がある変化方向を示すガイド画像を生成して、生成したガイド画像を前記操作者に提示させる、
請求項2または請求項3に記載のロボット遠隔操作システム。
【請求項8】
ロボットを遠隔操作する遠隔操作制御装置であって、
前記ロボットの状態を取得する第1取得部と、
前記ロボットの操作指令を操作者が入力する操作入力値を取得する第2取得部と、
前記第2取得部が前記操作入力値から操作指令を生成する操作指令生成部と、
を備え、
前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置とが異なる場合、異なる状態をオフセットとして確定し、前記オフセットした状態を維持したままロボット操作指令を生成する、
遠隔操作制御装置。
【請求項9】
ロボットを遠隔操作する遠隔操作制御方法であって、
第1取得部が、前記ロボットの状態を取得し、
第2取得部が、前記ロボットの操作指令を操作者が入力する操作入力値を取得し、
操作指令生成部が、前記操作入力値から操作指令を生成し、
前記操作指令生成部が、前記操作入力値に基づく位置と、前記ロボットの状態の位置とが異なる場合、異なる状態をオフセットとして確定し、前記オフセットした状態を維持したままロボット操作指令を生成する、
遠隔操作制御方法。
【請求項10】
ロボットを遠隔操作する遠隔操作制御装置のコンピュータに、
前記ロボットの状態を取得させ、
前記ロボットの操作指令を操作者が入力する操作入力値を取得させ、
前記操作入力値から操作指令を生成し、
前記操作入力値に基づく位置と、前記ロボットの状態の位置とが異なる場合、異なる状態をオフセットとして確定させ、前記オフセットした状態を維持したままロボット操作指令を生成させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット遠隔操作システム、遠隔操作制御装置、遠隔操作制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、ロボットを遠隔操作する技術が開発されている。例えば、特許文献1には、このようなシステムにおいて、エラーが発生した場合にエラーを検出した場合、エラーを解除してコマンドを再開させる技術が開示されている。
【0003】
ロボットを遠隔操作する場合は、例えば、操作者が外骨格のようなセンサを腕や手に密着させて操作する手法と、手にデータグローブ等を装着して操作する手法がある。
例えば、操作者がロボットを遠隔操作する場合は、例えば休憩時間などの期間、操作者の意思で作業を中断したいことがある。
操作者が外骨格のようなセンサを腕や手に密着させて操作する手法を用いた場合、操作者が遠隔操作を中断する際の取り付けた多数のセンサの形状を維持したまま、再開時に装着しなおすことで、ロボットの状態と一致させて遠隔操作を再開できる。
一方、手にデータグローブ等を装着して操作する手法では、再開前の状態に操作者が合わせる必要がった。
【先行技術文献】
【特許文献】
【0004】
特許第3615539号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、エラー時に自動的にコマンドを再開する技術が記載されているのみで、操作者の意思で作業を中断した後、作業を再開する場合に作業を再開できなかった。また、特許文献1に記載の技術において、仮に、エラー時と同様の処理を行った場合、再開前と再開後の操作指示が異なってしまうと、操作者が遠隔操作できなくなったり、ロボットを安全に動作させることができなくなる危険性もあった。
また、外骨格のようなセンサを腕や手に密着させて操作する従来技術では、外骨格の装着が大変であり、操作者にとって装着性等の利便性が悪かった。
さらに、データグローブ等を装着して操作する従来技術では、中断前のロボットの関節角の状態に操作者が合わせるのが手間であり困難であり、合わせられないとロボットと操作者の指示との間にズレが生じてしまうため、作業しづらくロボットを安全に動作させることができなくなる危険性もあった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであって、環境の安全性と人間操作者の操作しやすさを両立して、中断していた遠隔操作を再開できるロボット遠隔操作システム、遠隔操作制御装置、遠隔操作制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
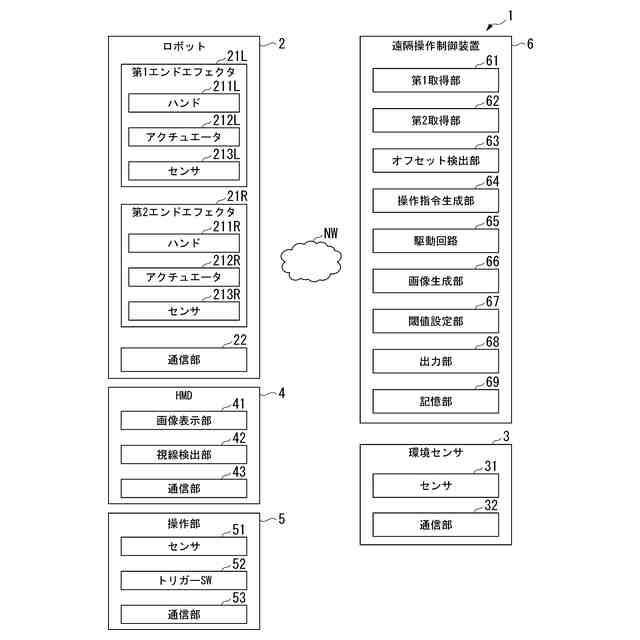
(1)上記目的を達成するため、本発明の一態様に係るロボット遠隔操作システムは、遠隔操作されるロボットと、前記ロボットの状態を取得する第1取得部と、前記ロボットの操作指令を操作者が入力する操作部と、前記操作部の操作入力値を取得する第2取得部と、前記操作入力値から操作指令を生成する操作指令生成部と、を備え、前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置が異なる場合、異なる状態をオフセットとして確定し、前記オフセットした状態を維持したままロボット操作指令を生成する、ロボット遠隔操作システムである。
【0008】
(2)上記(1)の本発明の一態様に係るロボット遠隔操作システムにおいて、前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置とに閾値以上の乖離がある場合に、前記操作入力値に基づく位置と、前記ロボットの状態の位置とが閾値以内になるまで前記ロボット操作指令を前記ロボットに出力しないようにしてもよい。
【0009】
(3)上記(2)の本発明の一態様に係るロボット遠隔操作システムにおいて、前記操作指令生成部は、前記操作入力値に基づく位置と、前記ロボットの状態の位置との差が、前記閾値未満になった場合に、前記ロボット操作指令を前記ロボットに出力するようにしてもよい。
【0010】
(4)上記(2)または(3)の本発明の一態様に係るロボット遠隔操作システムにおいて、前記閾値を設定する閾値設定部、をさらに備え、前記閾値設定部は、前記操作者が自分の手が低いままで、前記ロボットのハンドを高い場所で作業を再開させたい場合、位置の閾値を大きく設定するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
鞍乗型車両
今日
株式会社ザイテック
吸着装置
20日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
9日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
13日前
住友重機械工業株式会社
教示装置
6日前
株式会社ダイヘン
搬送装置
13日前
川崎重工業株式会社
ロボット
7日前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
13日前
住友重機械工業株式会社
支援装置
13日前
株式会社PILLAR
チューブ保持治具
1か月前
ホシデン株式会社
分解用治具
13日前
アピュアン株式会社
衝撃工具
15日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
28日前
株式会社マキタ
電気機器
7日前
川崎重工業株式会社
ロボットシステム
29日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
9日前
工機ホールディングス株式会社
作業機
9日前
工機ホールディングス株式会社
作業機
9日前
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
9日前
株式会社リコー
多関節ロボット
13日前
株式会社マキタ
電動作業機
1か月前
株式会社安川電機
ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ