TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101876
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023218951
出願日
2023-12-26
発明の名称
センシングシステム、作業車両、センシング方法、コンピュータプログラム
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250701BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】障害物ではない物体を障害物として検出してしまうことを抑制する。
【解決手段】本開示のある実施形態に係るセンシングシステムは、作業機械を用いて作業を行う作業車両のセンシングシステムである。センシングシステムは、作業車両に設けられ、作業車両の周辺の環境をセンシングして、センサデータを生成するセンサと、センサデータに基づいて、作業車両の周辺の検出領域に位置する物体を検出する処理装置とを備える。作業機械は、作業車両の本体に対する高さを変更可能であり、処理装置は、作業機械の高さの変化に応じて、物体の検出を行う検出領域のパターンを変更する。
【選択図】図6
特許請求の範囲
【請求項1】
作業機械を用いて作業を行う作業車両のセンシングシステムであって、
作業車両に設けられ、前記作業車両の周辺の環境をセンシングして、センサデータを生成するセンサと、
前記センサデータに基づいて、前記作業車両の周辺の検出領域に位置する物体を検出する処理装置と、
を備え、
前記作業機械は、前記作業車両の本体に対する高さを変更可能であり、
前記処理装置は、前記作業機械の高さの変化に応じて、前記物体の検出を行う前記検出領域のパターンを変更する、センシングシステム。
続きを表示(約 790 文字)
【請求項2】
前記処理装置は、前記センサがセンシングするセンシング領域から、前記センシング領域内に前記作業機械が入る部分を除いた部分を、前記検出領域に設定する、請求項1に記載のセンシングシステム。
【請求項3】
前記処理装置は、前記作業機械の高さが所定高さ以上である場合、前記センサがセンシングしたセンシング領域のうちの、前記センサからの距離が所定距離以下の部分の少なくとも一部を除いた部分を、前記検出領域に設定する、請求項1または2に記載のセンシングシステム。
【請求項4】
前記処理装置は、前記作業機械の高さの変化に応じて、前記所定距離の大きさを変更する、請求項3に記載のセンシングシステム。
【請求項5】
前記処理装置は、前記作業機械の高さが高い場合は低い場合よりも、前記所定距離を大きくする、請求項4に記載のセンシングシステム。
【請求項6】
前記所定距離は2m以上5m以下である、請求項3に記載のセンシングシステム。
【請求項7】
前記処理装置は、前記作業車両の前記本体に対する前記作業機械の高さを検出するセンサの出力信号に基づいて、前記作業機械の高さのデータを取得する、請求項1または2に記載のセンシングシステム。
【請求項8】
前記センサはミリ波レーダである、請求項1または2に記載のセンシングシステム。
【請求項9】
前記作業車両は収穫機であり、前記作業機械は圃場の作物を刈り取るヘッダを含む、請求項1または2に記載のセンシングシステム。
【請求項10】
前記作業車両はトラクタであり、前記作業機械は前記トラクタに接続されたインプルメントを含む、請求項1または2に記載のセンシングシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、センシングシステム、作業車両、センシング方法、コンピュータプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
次世代農業として、ICT(Information and Communication Technology)およびIoT(Internet of Things)を活用したスマート農業の研究開発が進められている。圃場で使用されるトラクタおよび収穫機などの農業機械の自動化および無人化に向けた研究開発も進められている。例えば、精密な測位が可能なGNSS(Global Navigation Satellite System)などの測位システムを利用して圃場内を自動運転で走行しながら農作業を行う農業機械が実用化されてきている。
【0003】
特許文献1は、圃場の作物を収穫しながら自動運転で走行する収穫機を開示している。収穫機は、圃場内の予め設定された走行経路を走行することで、作物を収穫することができる。
【先行技術文献】
【特許文献】
【0004】
特開2018-073399号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
センサを用いて農業機械等の作業車両の周辺の領域のサーチを行い、作業車両の周辺にある障害物を検出する技術の開発も進められている。
【0006】
センサを用いた障害物の検出処理においては、障害物ではない物体を障害物として検出してしまうことを抑制することが求められている。
【課題を解決するための手段】
【0007】
本開示のある実施形態に係るセンシングシステムは、作業機械を用いて作業を行う作業車両のセンシングシステムであって、作業車両に設けられ、前記作業車両の周辺の環境をセンシングして、センサデータを生成するセンサと、前記センサデータに基づいて、前記作業車両の周辺の検出領域に位置する物体を検出する処理装置とを備え、前記作業機械は、前記作業車両の本体に対する高さを変更可能であり、前記処理装置は、前記作業機械の高さの変化に応じて、前記物体の検出を行う前記検出領域のパターンを変更する。
【発明の効果】
【0008】
作業機械の高さが変化すると、センサがセンシングするセンシング領域内に作業機械が入る場合がある。本開示のある実施形態によれば、作業機械の高さの変化に応じて、物体の検出を行う検出領域のパターンを変更することで、センサデータのうちの作業機械を示す部分について物体の検出処理を行わないようにすることができる。これにより、作業機械を障害物等として検出することを抑制できる。また、処理装置の演算量が低減されることで、物体の検出処理速度を大きくすることができる。
【図面の簡単な説明】
【0009】
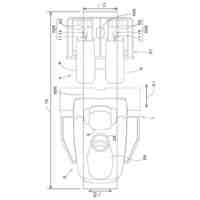
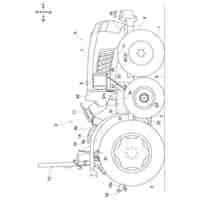
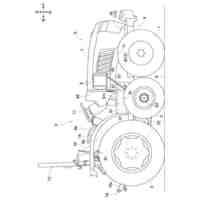
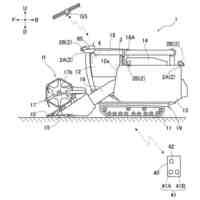
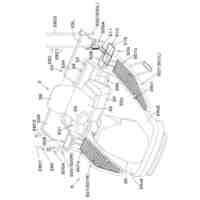
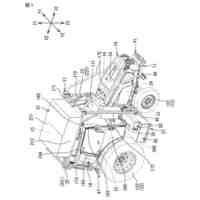
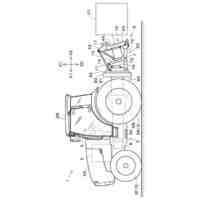
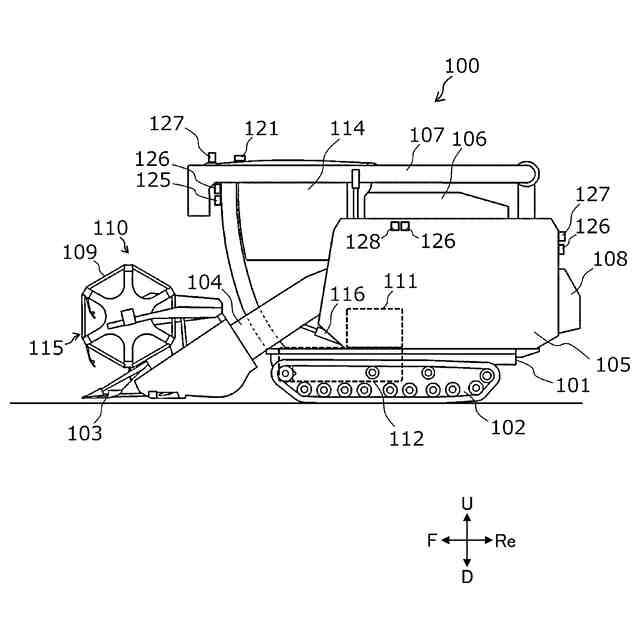
農業機械の例を示す図である。
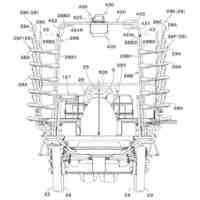
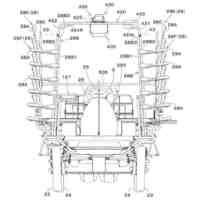
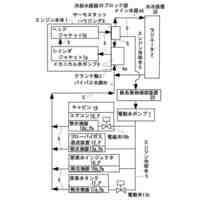
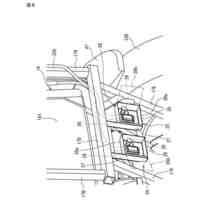
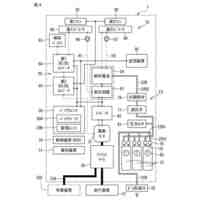
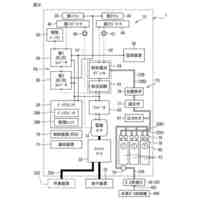
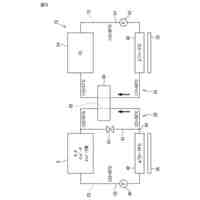
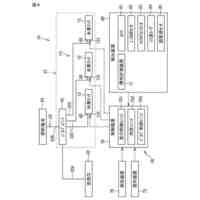
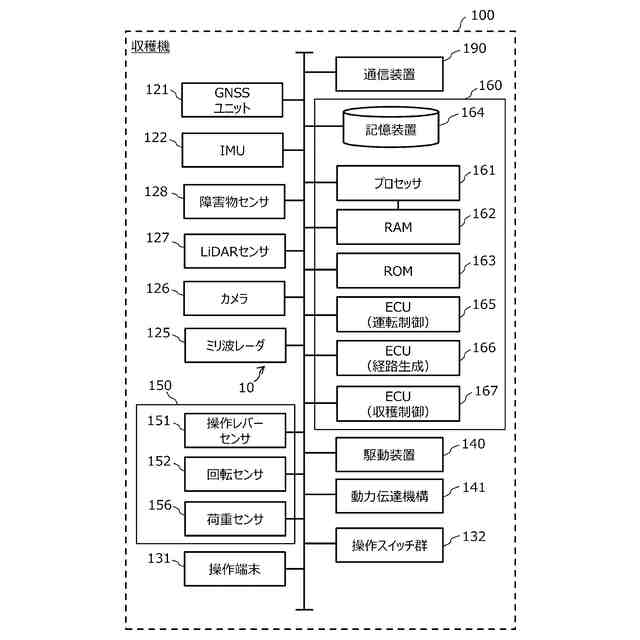
収穫機の構成例を示すブロック図である。
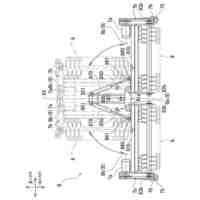
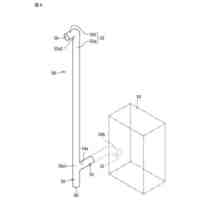
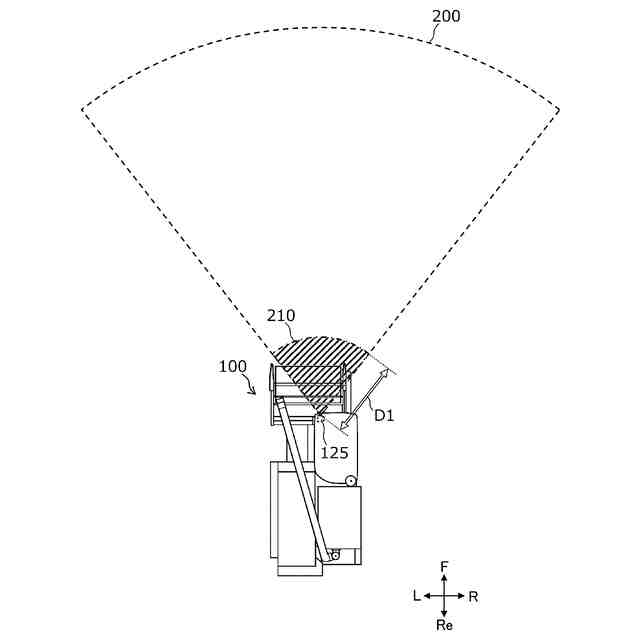
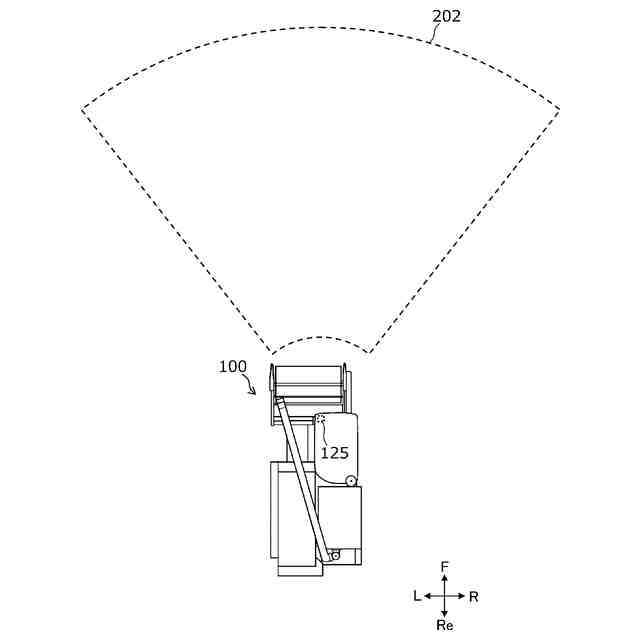
ミリ波レーダがセンシングするセンシング領域の例を示す上面図である。
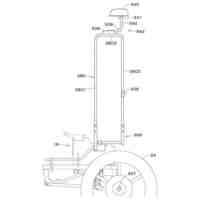
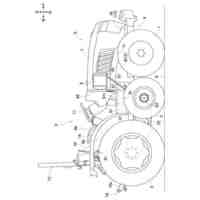
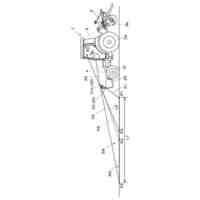
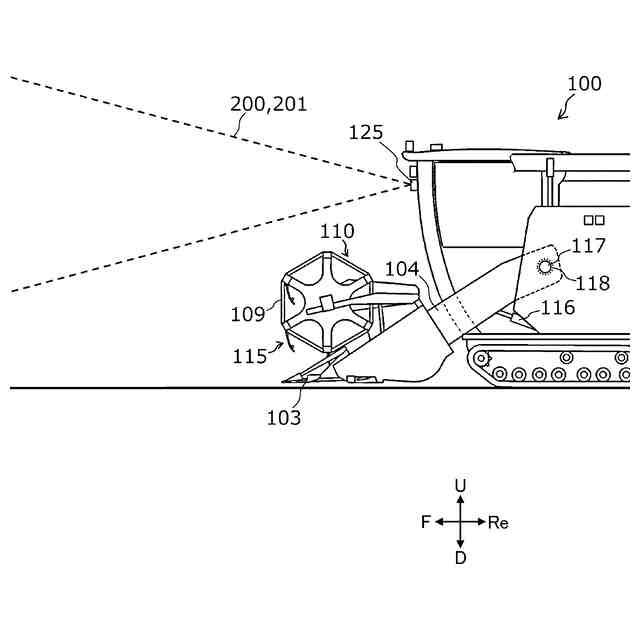
ミリ波レーダがセンシングするセンシング領域の例を示す側面図である。
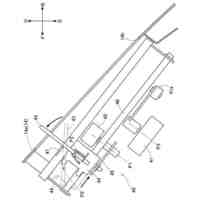
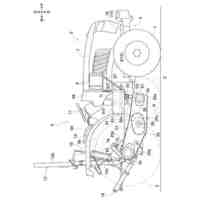
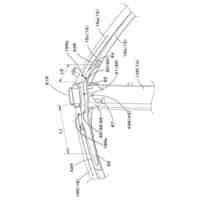
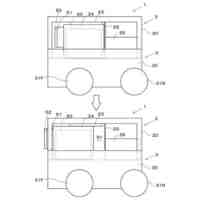
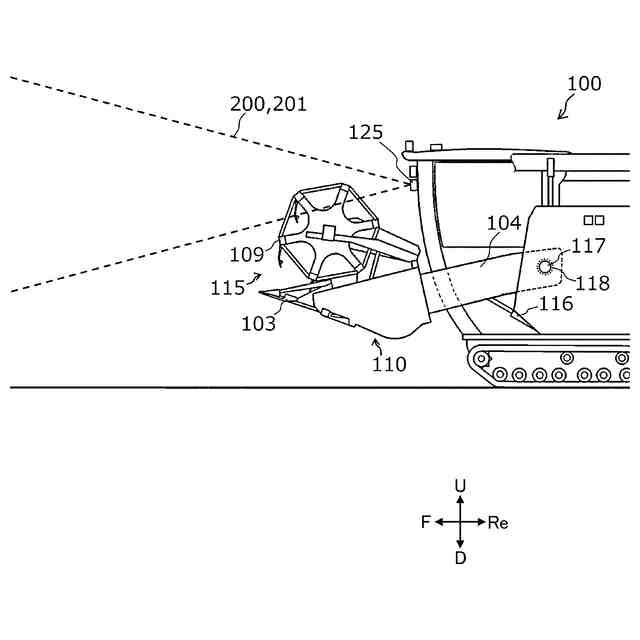
センシング領域および上方に変位したヘッダを示す側面図である。
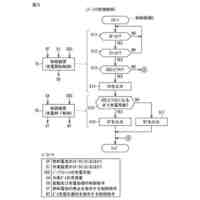
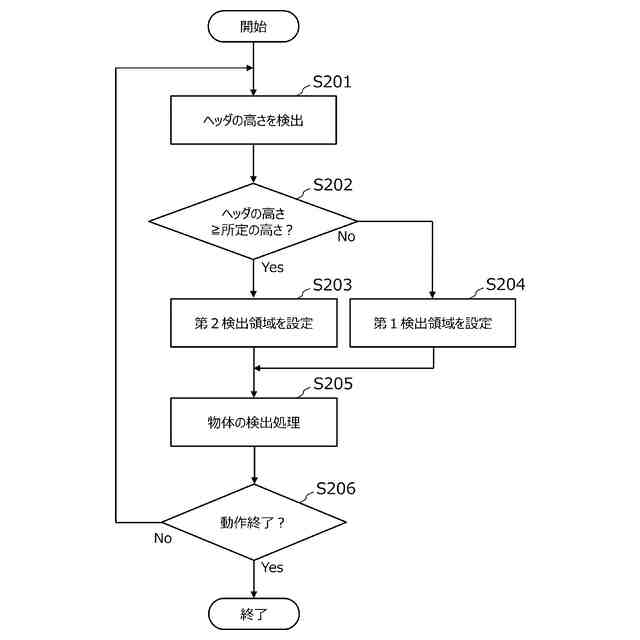
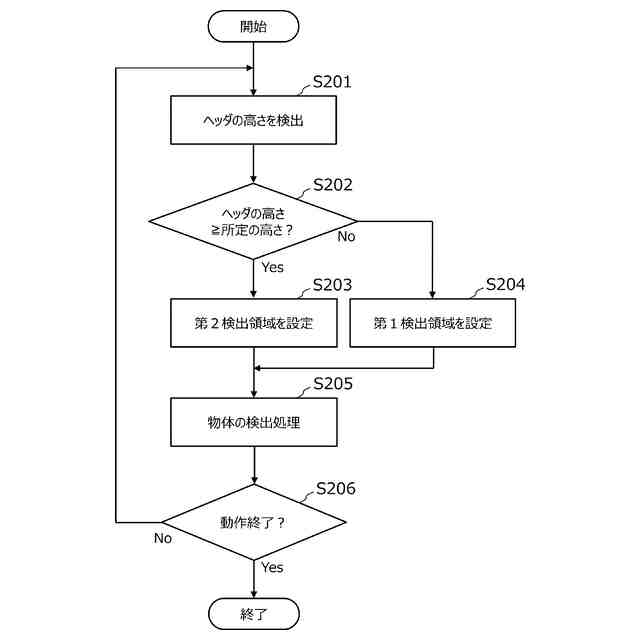
ヘッダの高さの変化に応じて検出領域のパターンを変更する処理の例を示すフローチャートである。
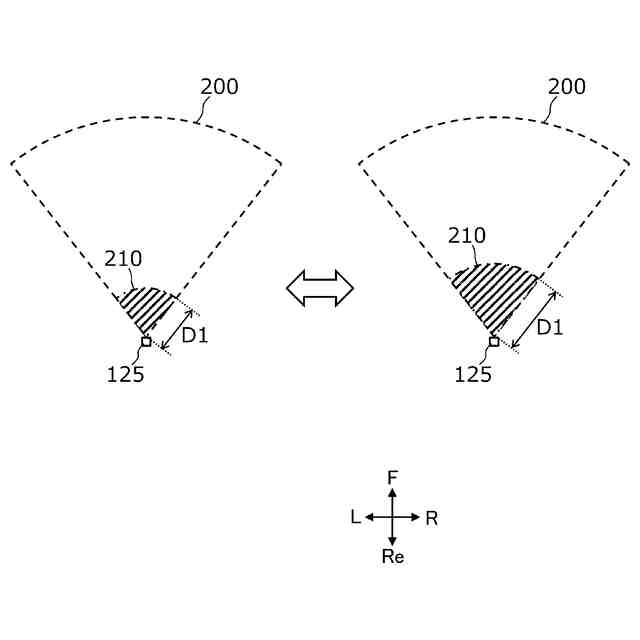
第2検出領域の設定において取り除く部分の例を示す上面図である。
第2検出領域の例を示す上面図である。
大きさが互いに異なる複数種類の取り除く部分を示す上面図である。
第2検出領域の設定において取り除く部分の別の例を示す上面図である。
第2検出領域の別の例を示す上面図である。
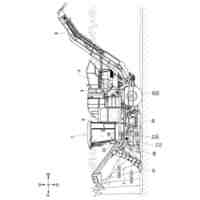
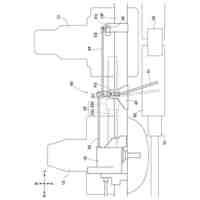
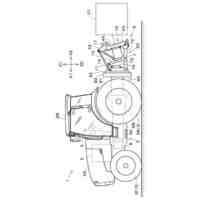
作業機械が接続されたトラクタの例を示す図である。
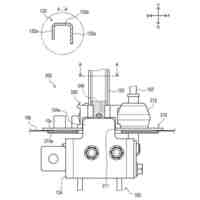
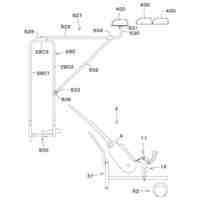
建設機械の例を示す図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態を説明する。ただし、必要以上に詳細な説明は省略することがある。例えば、既によく知られた事項の詳細な説明および実質的に同一の構成に関する重複する説明を省略することがある。これは、以下の説明が不必要に冗長になることを避け、当業者の理解を容易にするためである。なお、発明者は、当業者が本開示を十分に理解するために添付図面および以下の説明を提供するのであって、これらによって特許請求の範囲に記載の主題を限定することを意図するものではない。以下の説明において、同一または類似の機能を有する構成要素については、同一の参照符号を付している。図面に付した符号F、Re、L、R、U、Dは、それぞれ前、後、左、右、上、下を表す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
18日前
株式会社クボタ
移植機
20日前
株式会社クボタ
移植機
20日前
株式会社クボタ
収穫機
20日前
株式会社クボタ
作業車
19日前
株式会社クボタ
移植機
21日前
株式会社クボタ
作業機
25日前
株式会社クボタ
移植機
21日前
株式会社クボタ
移植機
20日前
株式会社クボタ
移植機
20日前
株式会社クボタ
作業機
25日前
株式会社クボタ
移植機
20日前
株式会社クボタ
収穫機
25日前
株式会社クボタ
移植機
20日前
株式会社クボタ
作業機
25日前
株式会社クボタ
作業機
25日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
エンジン
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業装置
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
キャビン
19日前
株式会社クボタ
キャビン
19日前
株式会社クボタ
キャビン
19日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
エンジン
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業車両
20日前
株式会社クボタ
作業機械
20日前
株式会社クボタ
作業車両
18日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業機械
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ