TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101281
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218015
出願日
2023-12-25
発明の名称
情報処理装置、方法、プログラムおよび情報処理システム
出願人
沖電気工業株式会社
代理人
個人
,
個人
,
個人
主分類
G08B
21/02 20060101AFI20250630BHJP(信号)
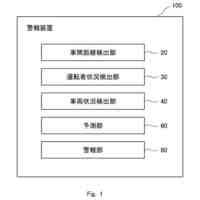
要約
【課題】移動装置への機能追加を抑制しつつ補助動作を実現する。
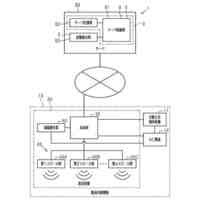
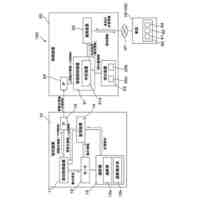
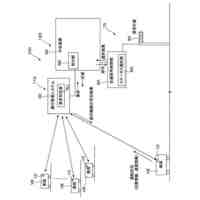
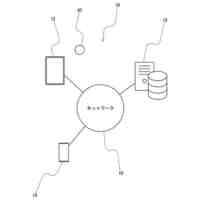
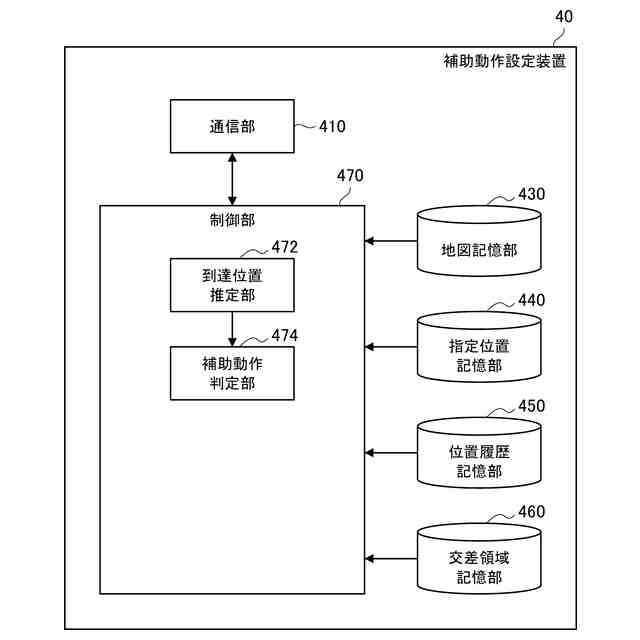
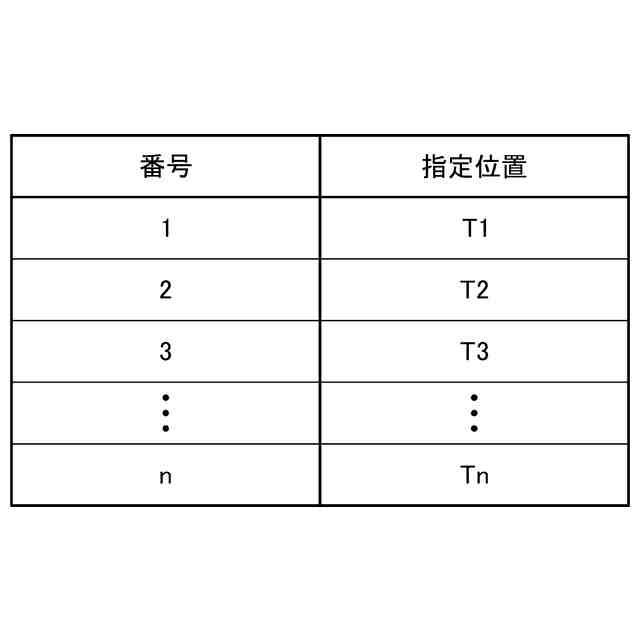
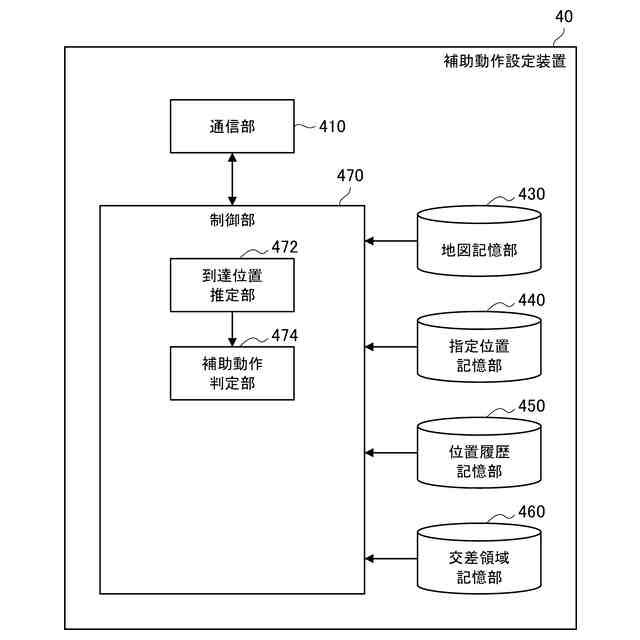
【解決手段】移動機構を有する移動装置の位置情報、および前記移動装置の移動先として設定された指定位置を示す情報を取得する取得部と、前記位置情報および前記指定位置に基づき、前記移動装置の存在を周囲に知らせる補助動作の実行についての判定を行う判定部と、前記判定の結果に応じて、前記補助動作の実行機能を有する装置に前記補助動作の実行指示を送信する送信部と、を備える、情報処理装置。
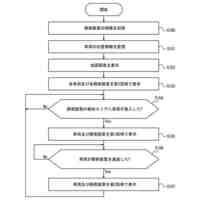
【選択図】図5
特許請求の範囲
【請求項1】
移動機構を有する移動装置の位置情報、および前記移動装置の移動先として設定された指定位置を示す情報を取得する取得部と、
前記位置情報および前記指定位置に基づき、前記移動装置の存在を周囲に知らせる補助動作の実行についての判定を行う判定部と、
前記判定の結果に応じて、前記補助動作の実行機能を有する装置に前記補助動作の実行指示を送信する送信部と、
を備える、情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記判定部は、前記移動装置の存在を周囲に知らせる補助動作についての判定として、前記移動装置が将来の時点で所定領域に含まれるか否かの判定を行う、請求項1に記載の情報処理装置。
【請求項3】
前記将来の時点は、所定時間後の時点である、請求項2に記載の情報処理装置。
【請求項4】
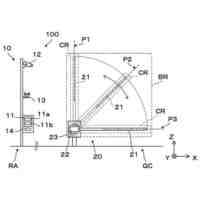
前記所定領域は、複数の道が交差する交差領域である、請求項3に記載の情報処理装置。
【請求項5】
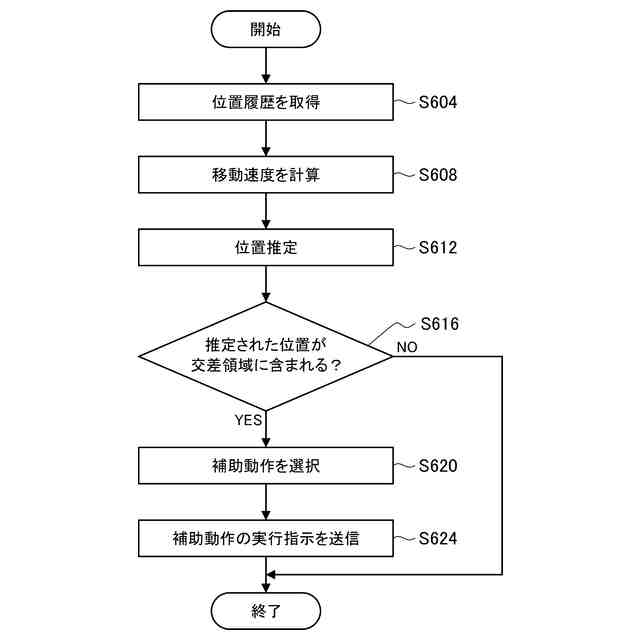
前記判定部は、前記位置情報、前記指定位置および前記移動装置の移動速度に基づき、前記所定時間後の時点で前記移動装置が到達する位置を推定し、推定された位置が前記交差領域に含まれるか否かを判定する、請求項4に記載の情報処理装置。
【請求項6】
前記情報処理装置は、
前記交差領域が拡張された拡張領域を特定する領域特定部をさらに備え、
前記判定部は、前記移動装置の存在を周囲に知らせる補助動作についての判定として、前記移動装置の現在位置が前記拡張領域に含まれているか否かの判定を行う、請求項4に記載の情報処理装置。
【請求項7】
前記拡張領域は、前記移動装置の移動速度に所定係数を乗じた結果の分、前記交差領域が拡張された領域である、請求項6に記載の情報処理装置。
【請求項8】
前記情報処理装置は、
前記移動装置の速度ベクトルと、前記移動装置の現在位置から前記指定位置へ向かう方角ベクトルとの成す角度を算出する角度算出部をさらに備え、
前記判定部は、前記角度に基づき前記移動装置の方向転換の有無をさらに判定し、
前記送信部は、前記移動装置の現在位置が前記拡張領域に含まれると判定され、かつ、前記移動装置の方向転換があると判定された場合に、前記補助動作の実行機能を有する装置に前記補助動作の実行指示を送信する、請求項6または7に記載の情報処理装置。
【請求項9】
前記送信部は、前記補助動作の実行機能を有する装置に、前記方向転換の向きに応じた補助動作の実行指示を送信する、請求項8に記載の情報処理装置。
【請求項10】
前記補助動作の実行機能を有する装置は、前記移動装置である、請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、方法、プログラムおよび情報処理システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
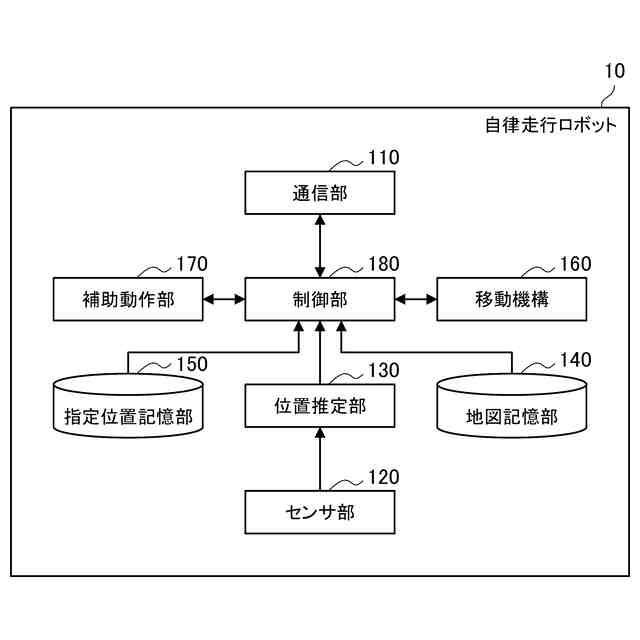
近年、交通施設および商業施設などにおける警備業務または搬送業務の自動化に向けた自律走行ロボットの開発が進められている。自律走行とは、ロボットが現在位置から目標位置まで人の手を介さずに自律で走行する機能であり、自律走行ロボットは、自律走行の機能を持つロボットである。例えば、自律走行ロボットは、設定された走行経路上の複数の位置の各々を示すアクション指示を順次に受信し、各位置を目標位置として移動することで、設定された走行経路に沿って移動することが可能である。
【0003】
ここで、自律走行ロボットが人と共存する空間を移動する場合、安全性向上のために、自律走行ロボットの存在を周囲の人に知らせる通知手段を用いた補助動作の実行が望まれる。通知手段としては、例えば、ウィンカーおよびスピーカーなどが挙げられ、補助動作としては、例えば、右左折時におけるウィンカーの使用、交差点通過時における音の出力などが挙げられる。これに関連し、特許文献1には、車両の現在位置および道路情報などに基づき、ウィンカーを自動制御するナビゲーション装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許2731899号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、自律走行ロボットは上記の通知手段を必ずしも具備していない。自律走行ロボットに通知手段が外付けされた場合でも、通知手段を自動制御するための機能をそれぞれの自律走行ロボットに追加することの障壁は高い。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、移動装置への機能追加を抑制しつつ補助動作を実現することが可能な技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、移動機構を有する移動装置の位置情報、および前記移動装置の移動先として設定された指定位置を示す情報を取得する取得部と、前記位置情報および前記指定位置に基づき、前記移動装置の存在を周囲に知らせる補助動作の実行についての判定を行う判定部と、前記判定の結果に応じて、前記補助動作の実行機能を有する装置に前記補助動作の実行指示を送信する送信部と、を備える、情報処理装置が提供される。
【0008】
前記判定部は、前記移動装置の存在を周囲に知らせる補助動作についての判定として、前記移動装置が将来の時点で所定領域に含まれるか否かの判定を行ってもよい。
【0009】
前記将来の時点は、所定時間後の時点であってもよい。
【0010】
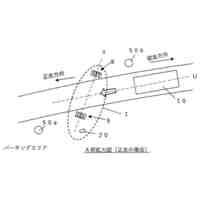
前記所定領域は、複数の道が交差する交差領域であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
沖電気工業株式会社
処理装置、プログラム、および処理方法
12日前
沖電気工業株式会社
情報処理装置、情報処理方法およびプログラム
12日前
沖電気工業株式会社
情報処理装置、方法、プログラムおよび情報処理システム
15日前
個人
自動車ケアフル灯
3か月前
日本精機株式会社
路面投影装置
20日前
ニッタン株式会社
発信機
26日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
15日前
ニッタン株式会社
発信機
2か月前
個人
防犯に特化したアプリケーション
28日前
個人
逆走・正走車両検出システム
2か月前
東京都公立大学法人
液滴検出装置
28日前
TOA株式会社
拡声放送システム
19日前
日本信号株式会社
信号情報システム
13日前
日本信号株式会社
情報提供システム
2か月前
個人
乗り物の移動を支援する方法及び装置
6日前
日本信号株式会社
情報提供システム
13日前
アズビル株式会社
建物管理システム
1か月前
株式会社アジラ
データ転送システム
19日前
株式会社JVCケンウッド
警報装置
14日前
ホーチキ株式会社
異常報知設備
2か月前
ホーチキ株式会社
異常報知設備
2か月前
株式会社JVCケンウッド
情報処理装置
1か月前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
日本信号株式会社
交通信号制御システム
13日前
トヨタ自動車株式会社
回避動作判別装置
13日前
ホーチキ株式会社
非常通報システム
2か月前
ホーチキ株式会社
火災検出システム
14日前
株式会社豊田自動織機
制御システム
19日前
株式会社フィットネスワン
見守りシステム
2か月前
トヨタ自動車株式会社
配車システム
2か月前
Adora株式会社
アプリ使用制御システム
2か月前
トヨタ自動車株式会社
障害物検知装置
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
大和ハウス工業株式会社
住環境管理設備
14日前
トヨタ自動車株式会社
方法
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ