TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095290
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211206
出願日
2023-12-14
発明の名称
蔓型パワーソフトグリッパ装置、その駆動方法、並びに蔓型パワーソフトグリッパを用いた装置及びジャッキアップ装置
出願人
国立大学法人東京科学大学
代理人
個人
主分類
B25J
15/08 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】耐荷重が高く、外部環境の予測が困難で不定型重量物を取扱う災害現場等で活用できる蔓型パワーソフトグリッパ装置、その駆動方法、並びに蔓型パワーソフトグリッパを用いた装置及びジャッキアップ装置を提供する。
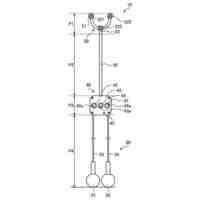
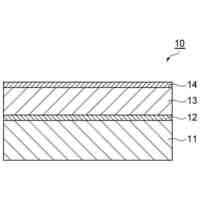
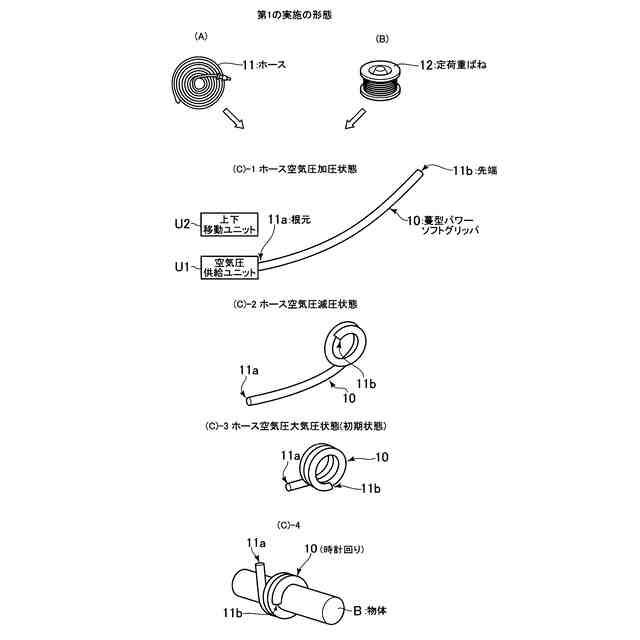
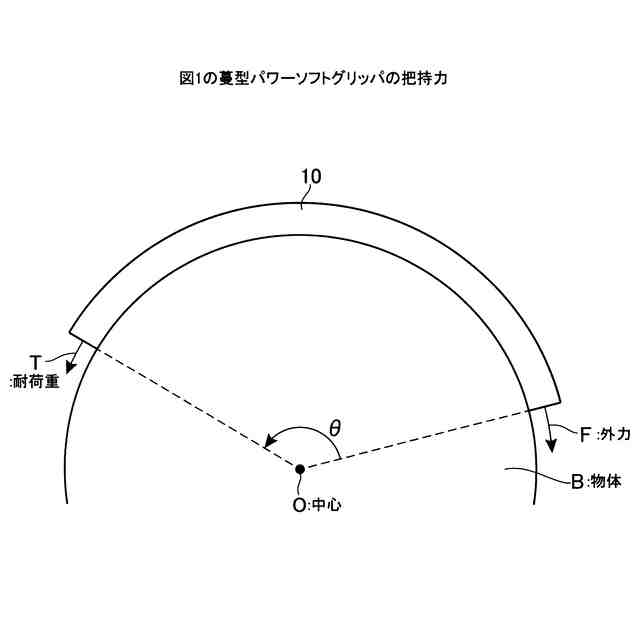
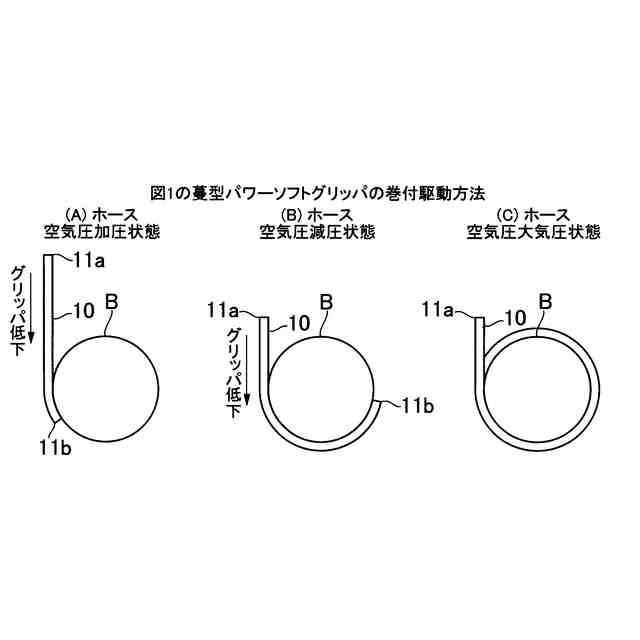
【解決手段】空気を透過しない伸張状態ホース11に定荷重ばね12を挿入することによって蔓型パワーソフトグリッパ10が構成される。ホース11の根元11aには空気孔が設けられて開放され、ホース1の先端11bは閉鎖される。蔓型パワーソフトグリッパ10においては、ホース11を大気圧より非常に大きい空気圧で加圧すると、直線状に伸び、また、ホース11の空気圧を減圧すると、ホース11は螺旋状に巻かれ始め、最後に、ホース11の空気圧が大気圧となると、ホース11は根元11aから先端11bへ時計回りに完全な螺旋状に戻る。この螺旋状態(初期状態)で、物体Bを把持すると、物体Bは大きな耐荷重で把持される。
【選択図】 図1
特許請求の範囲
【請求項1】
少なくとも1つの蔓型パワーソフトグリッパを具備する蔓型パワーソフトグリッパ装置であって、
前記蔓型パワーソフトグリッパは、
開放された根元及び閉鎖された先端を有するホースと、
前記ホースに挿入された定荷重ばねと
を具備する蔓型パワーソフトグリッパ装置。
続きを表示(約 1,200 文字)
【請求項2】
前記蔓型パワーソフトグリッパは、さらに、
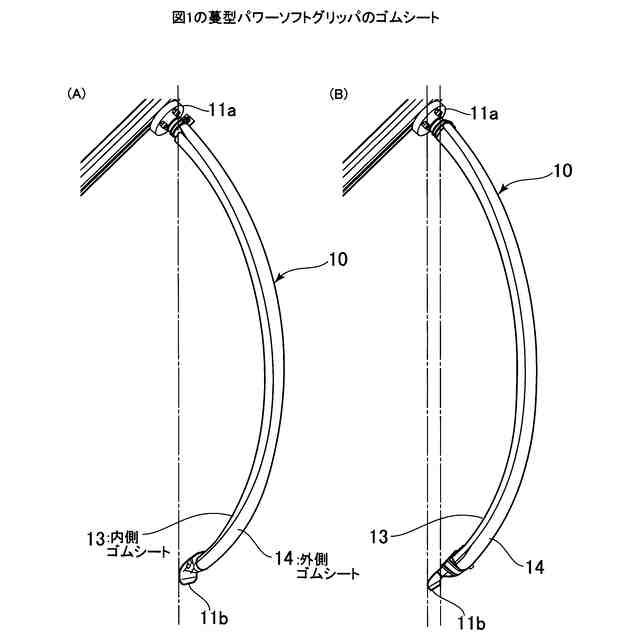
前記定荷重ばねの裏面に対向した前記ホースの内側外面に接着された内側弾性シートと、
前記定荷重ばねの表面に対向した前記ホースの外側外面に接着された外側弾性シートと
を具備する請求項1に記載の蔓型パワーソフトグリッパ装置。
【請求項3】
前記外側弾性シートの厚さは前記内側弾性シートの厚さより大きい請求項2に記載の蔓型パワーソフトグリッパ装置。
【請求項4】
前記外側弾性シートの厚さは前記蔓型パワーソフトグリッパの根元側よりも先端側で大きくした請求項2に記載の蔓型パワーソフトグリッパ装置。
【請求項5】
前記蔓型パワーソフトグリッパは、
前記内側弾性シートの先端側に設けられた樹脂テープを具備する請求項2に記載の蔓型パワーソフトグリッパ装置。
【請求項6】
前記樹脂テープはフッ素樹脂テープである請求項5に記載の蔓型パワーソフトグリッパ装置。
【請求項7】
前記蔓型パワーソフトグリッパは、
前記外側弾性シートの先端側に設けられた収縮型アクチュエータ又は硬直型アクチュエータを具備する請求項2に記載の蔓型パワーソフトグリッパ装置。
【請求項8】
前記収縮型アクチュエータ又は前記硬直型アクチュエータは人工筋肉である請求項7に記載の蔓型パワーソフトグリッパ装置。
【請求項9】
対象物体を把持するための対向する少なくとも第1、第2の蔓型パワーソフトグリッパを具備する蔓型パワーソフトグリッパ装置であって、
前記各第1、第2の蔓型パワーソフトグリッパは、
開放された根元及び閉鎖された先端を有するホースと、
前記ホースに挿入された定荷重ばねと
を具備し、
前記第1の蔓型パワーソフトグリッパの定荷重ばねの前記対象物体に対する巻き付け方向と、前記第2の蔓型パワーソフトグリッパの定荷重ばねの前記対象物体に対する巻き付け方向とが互いに逆方向である蔓型パワーソフトグリッパ装置。
【請求項10】
請求項1に記載の蔓型パワーソフトグリッパ装置の駆動方法であって、
前記ホースの流体圧を初期流体圧より高い加圧流体圧とすると共に、前記ホースを低下させて対象物体へ接近させる第1の工程と、
前記第1の工程の後に、前記ホースの流体圧を前記加圧流体圧より低くすると共に、前記ホースをさらに低下させる第2の工程と、
前記第2の工程の後に、前記ホースの流体圧を前記初期流体圧とすると共に、前記ホースの低下を停止する第3の工程と
を具備する蔓型パワーソフトグリッパ装置の駆動方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はソフトグリッパ、特に、蔓型パワーソフトグリッパ装置、その駆動方法、並びに蔓型パワーソフトグリッパを用いた装置及びジャッキアップ装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来のロボットハンドに比較して形状適応能力が高いために、最近、生体の筋肉組織を柔軟な素材を用いて工学的に模倣したソフトグリッパが着目されている。
【0003】
生物の生態たとえば象の鼻(参照:非特許文献1)、植物の蔓(参照:非特許文献2)を模倣したソフトグリッパは巻き付け動作により物体を把持する。しかしながら、これらのソフトグリッパの耐荷重は低い。
【0004】
また、耐荷重を高めたソフトグリッパとして次のものが知られている。たとえば、ヤモリに着想を得た表面層を有するエラストマーアクチュエータは耐荷重11.3kgを有し(参照:非特許文献3)、螺旋状に配置された空圧人工筋肉によって締め付けられたソフトグリッパは最大で35.5kgの耐荷重を有する(参照:非特許文献4)。
【先行技術文献】
【非特許文献】
【0005】
Yuwang Liu, Zhuang Ge, Shangkui Yang, Ian D.Walker, and Zhaojie Ju. Elephant’s Trunk Robot: An Extremely Versatile Under-Actuated Continuum Robot Driven by a Single Motor. Journal of Mechanisms and Robotics, 11(5), 07 2019. 051008.
Wei Wang, Chenzhe Li, Maenghyo Cho, and Sung-Hoon Ahn. Soft tendril-inspired grippers: Shapemorphing of programmable polymer-paper bilayer composites. ACS Applied Materials & Interfaces, 10(12):10419-10427, Mar 2018.
Paul Gluck, Srinivasan A. Suresh, Donald Ruffatto, Mark Cutkosky, Michael T. Tolley, and Aaron Parness. A soft robotic gripper with gecko-inspired adhesive. IEEE Robotics and Automation Letters, 3(2):903-910, 2018.
Haili Li, Jiantao Yao, Pan Zhou, Wumian Zhao, Yun-dou Xu, and Yongsheng Zhao.Design and modeling of a high-load soft robotic gripper inspired by biological winding*. Bioinspiration & Biomimetics, 15(2):026006, feb 2020.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述のソフトグリッパはいずれも耐荷重が依然として低く、外部環境の予測が困難で不定型重量物を取扱う災害現場等での活用には不十分であるという課題がある。
【課題を解決するための手段】
【0007】
上述の課題を解決するために、本発明に係る蔓型パワーソフトグリッパ装置は、少なくとも1つの蔓型パワーソフトグリッパを具備する蔓型パワーソフトグリッパ装置であって、蔓型パワーソフトグリッパは、開放された根元及び閉鎖された先端を有するホースと、ホースに挿入された定荷重ばねとを具備するものである。
【0008】
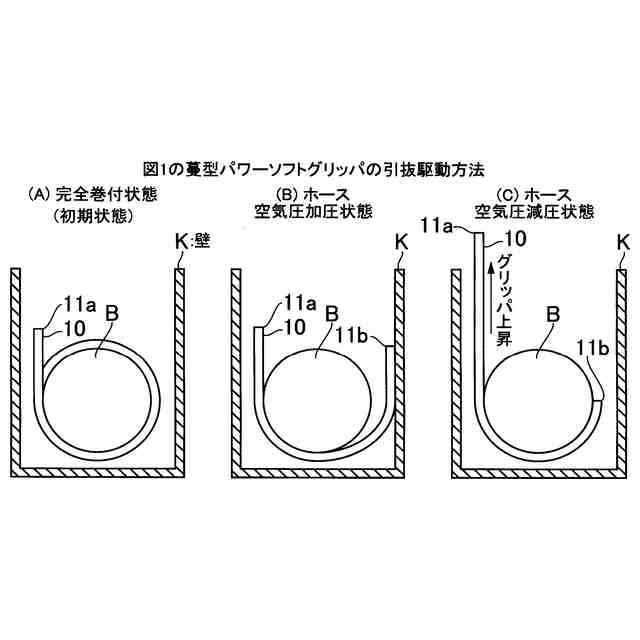
また、本発明に係る蔓型パワーソフトグリッパ装置の駆動方法は、上述の蔓型パワーソフトグリッパ装置の駆動方法であって、ホースの流体圧を初期流体圧より高い加圧流体圧とすると共に、ホースを低下させて対象物体へ接近させる第1の工程と、第1の工程の後に、ホースの流体圧を加圧流体圧より低くすると共に、ホースをさらに低下させる第2の工程と、第2の工程の後に、ホースの流体圧を初期流体圧とすると共に、ホースの低下を停止する第3の工程とを具備するものである。
【発明の効果】
【0009】
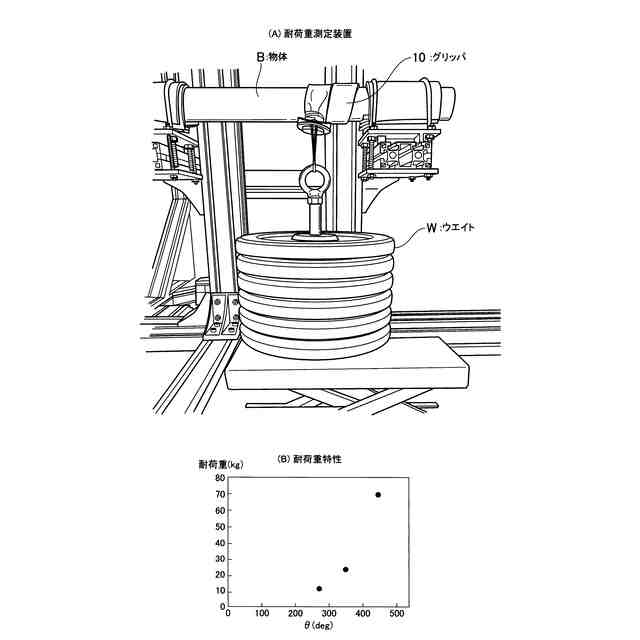
本発明によれば、定荷重ばねの定荷重より大きな耐荷重を実現できるので、耐荷重を大きくできる。従って、災害現場等で活用できる。
【図面の簡単な説明】
【0010】
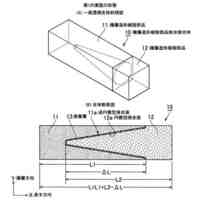
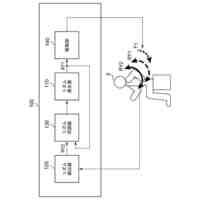
本発明に係る蔓型パワーソフトグリッパ装置の第1の実施の形態を示し、(A)は巻回されたホースの上面図、(B)は定荷重ばねの斜視図、(C)-1、(C)-2、(C)-3、(C)-4は定荷重ばねが挿入されたホースを示す斜視図である。
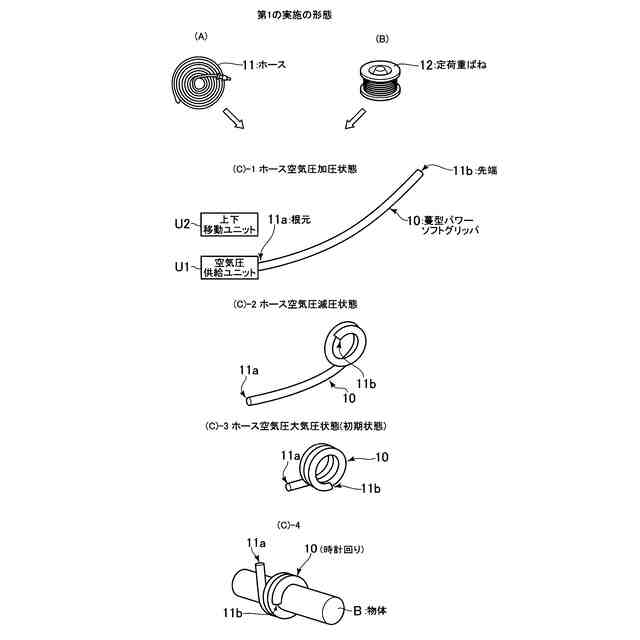
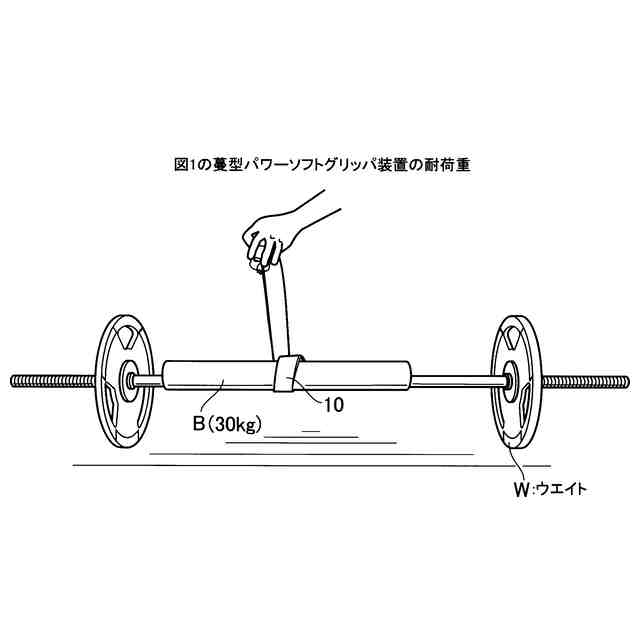
図1の蔓型パワーソフトグリッパの耐荷重を説明するための図である。
図1の蔓型パワーソフトグリッパの動作状態を説明する斜視図である。
図1の蔓型パワーソフトグリッパの巻付駆動方法を説明するための図である。
図1の蔓型パワーソフトグリッパの引抜駆動方法を説明するための図である。
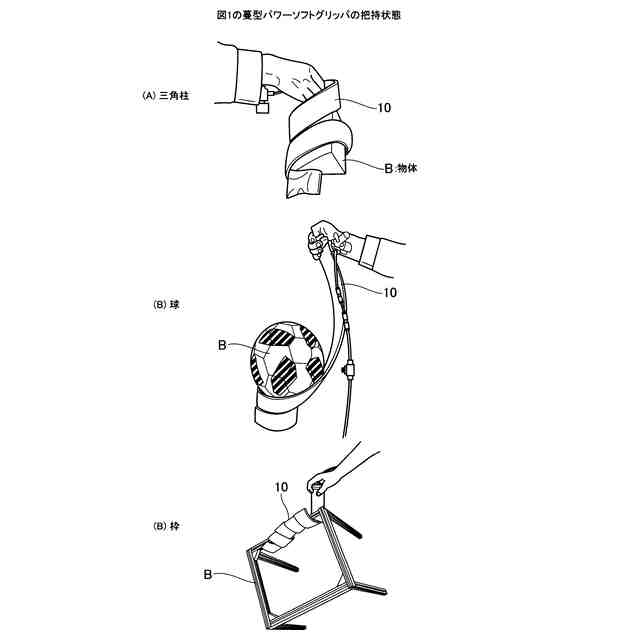
図1の蔓型パワーソフトグリッパの実際の物体把持状態を示す斜視図であって、(A)は物体が三角柱の場合を示し、(B)は物体が球の場合を示し、(C)は物体が枠である場合を示す。
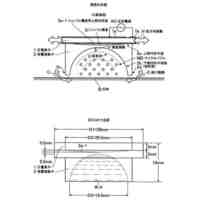
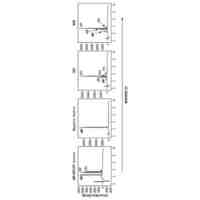
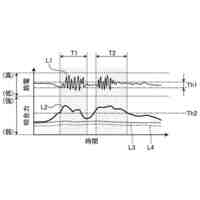
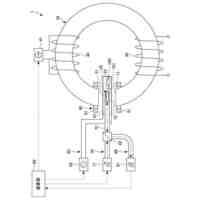
図1の蔓型パワーソフトグリッパの耐荷重を説明するための図であって、(A)は耐荷重測定装置を示す斜視図、(B)は(A)の耐荷重測定装置によって測定された耐荷重特性を示すグラフである。
図1の蔓型パワーソフトグリッパのゴムシートを説明するための図である。
図1の蔓型パワーソフトグリッパ装置による定格荷重以上の物体の把持動作を説明するための図である。
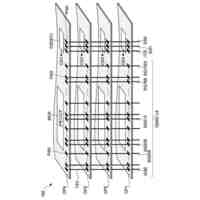
本発明に係る蔓型パワーソフトグリッパ装置の第2の実施の形態を示す斜視図である。
図10の蔓型パワーソフトグリッパ装置による定格荷重以上の物体の把持動作を説明するための図である。
図10の蔓型パワーソフトグリッパ装置の駆動方法を説明するための斜視図である。
本発明に係る蔓型パワーソフトグリッパ装置の第3の実施の形態を示す斜視図である。
図13の蔓型パワーソフトグリッパ装置の蔓型パワーソフトグリッパの駆動方法を説明するための斜視図である。
図13の蔓型パワーソフトグリッパ装置の他の蔓型パワーソフトグリッパの駆動方法を説明するための斜視図である。
本発明に係る蔓型パワーソフトグリッパ装置の第4の実施の形態を示す斜視図である。
図16の蔓型パワーソフトグリッパ装置の動作を説明する横面図である。
図16の蔓型パワーソフトグリッパの巻付駆動動作を説明するための図である。
図16の蔓型パワーソフトグリッパの空圧人工筋肉を用いた巻付駆動動作を説明するための図である。
図13の蔓型パワーソフトグリッパ装置の変更例を示す斜視図である。
図20の蔓型パワーソフトグリッパ装置の動作例を示す斜視図である。
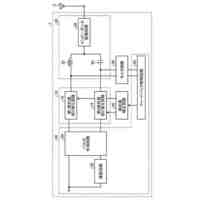
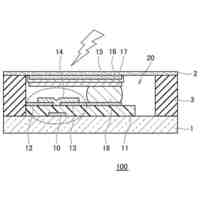
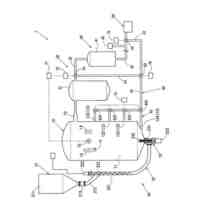
本発明に係る観察装置の実施の形態を示す図であって、(A)は非観察状態であり、(B)は観察状態である。
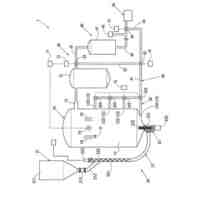
本発明に係るジャッキアップ装置の実施の形態を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人東京科学大学
伝送回路
3か月前
国立大学法人東京科学大学
クリーム
18日前
国立大学法人東京科学大学
超音波照射器
2か月前
国立大学法人東京科学大学
慢性腎臓病の検査方法
3か月前
国立大学法人東京科学大学
積層造形樹脂部品嵌合接合体
17日前
国立大学法人東京科学大学
半導体装置および半導体チップ
2か月前
国立大学法人東京科学大学
歯科医療用部材とその製造方法
1か月前
国立大学法人東京科学大学
食品に曵糸性を付与する乳酸菌
1か月前
国立大学法人東京科学大学
歩行改善装置および歩行改善方法
1か月前
国立大学法人東京科学大学
ヌクレオシド三リン酸の製造方法
2か月前
国立大学法人東京科学大学
メタン製造方法及びメタン製造装置
24日前
国立大学法人東京科学大学
蛍光繊維体及び蛍光繊維体の製造方法
1か月前
スタンレー電気株式会社
有機半導体装置
1か月前
三菱ケミカル株式会社
ポリエステル樹脂
2か月前
三浦工業株式会社
過酸化水素の除去方法
2か月前
株式会社ジャパンディスプレイ
検出装置
3か月前
日本特殊陶業株式会社
アンモニアの合成装置
1か月前
日本特殊陶業株式会社
アンモニアの合成装置
1か月前
株式会社ジャパンディスプレイ
検出システム
3か月前
TDK株式会社
圧電薄膜、及び圧電薄膜素子
2か月前
鉄建建設株式会社
ガス化方法及びガス化装置
2か月前
鉄建建設株式会社
ガス化装置及びガス化方法
2か月前
国立大学法人東京科学大学
情報処理システム、情報処理方法及びプログラム
1か月前
国立大学法人東京科学大学
テレスコピック型ロボットアーム及びその駆動方法
1か月前
株式会社ジャパンディスプレイ
歯ぎしり抑制装置
3か月前
国立大学法人東京科学大学
部分的内皮間葉移行マーカーとしての遺伝子の発現産物の使用
1か月前
国立大学法人東京科学大学
組換え水素酸化細菌、及びポリヒドロキシアルカン酸の製造方法
25日前
一般財団法人電力中央研究所
直流遮断器
2か月前
国立大学法人東京科学大学
情報処理システム、画像の投影方法、情報処理方法及びプログラム
3か月前
東ソー株式会社
窒化マグネシウムケイ素膜、圧電体及び圧電素子
15日前
株式会社オハラ
酸化物薄膜、およびその酸化物薄膜を含む誘電体素子
1か月前
国立大学法人東京科学大学
複合化正極活物質、正極合剤、全固体リチウムイオン電池、及び、移動体
1か月前
国立研究開発法人産業技術総合研究所
電流測定装置および電流測定方法
2か月前
国立大学法人東京科学大学
小脳または大脳皮質における細胞において所定の遺伝子を発現させるためのベクター
2か月前
国立大学法人東京科学大学
ヘテロ核酸のBBB通過脂質リガンド
3か月前
国立大学法人東京科学大学
アンチセンス核酸の毒性を軽減する方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ