TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094575
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210215
出願日
2023-12-13
発明の名称
教示装置、ロボットシステム、教示装置の制御方法及び制御プログラム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250618BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザがロボットの動作領域を把握しやすくなる。
【解決手段】ロボットシステム1は、ロボットアーム2と、ロボットアーム2を撮影する撮影カメラ4と、教示装置5を備えている。教示装置5は、ロボットアーム2を含むその周辺領域の画像を表示する表示部53と、制御部58とを備えている。制御部58は、ロボットアーム2の動作領域を取得し、表示部53に表示されたロボットアーム2の画像上に動作領域を重ねて表示させる。
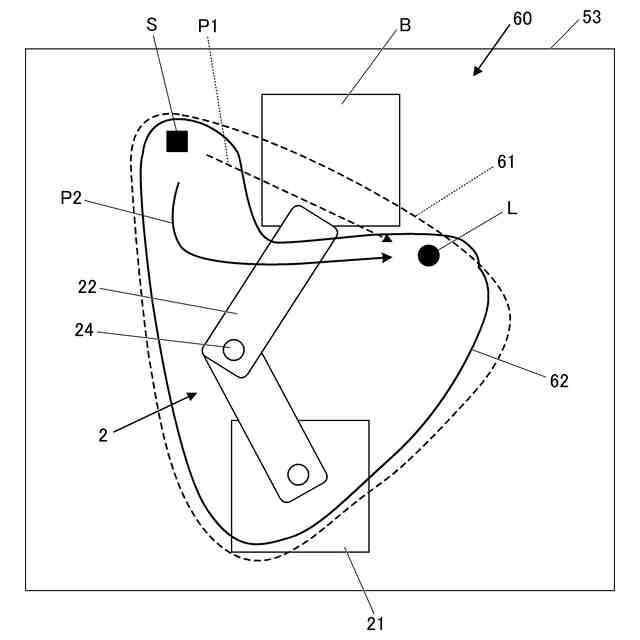
【選択図】図3
特許請求の範囲
【請求項1】
ロボットを含むその周辺領域の画像を表示する表示部と、
前記ロボットの動作領域を取得する取得部と、
前記表示部に表示された前記ロボットの画像上に前記動作領域を重ねて表示させる表示制御部と、
を備える教示装置。
続きを表示(約 790 文字)
【請求項2】
ユーザ操作に基づいて、前記動作領域を変更する変更部を備え、
前記表示制御部は、変更後の前記動作領域を変更前のものとは異なる表示態様で前記表示部に表示させる、
請求項1に記載の教示装置。
【請求項3】
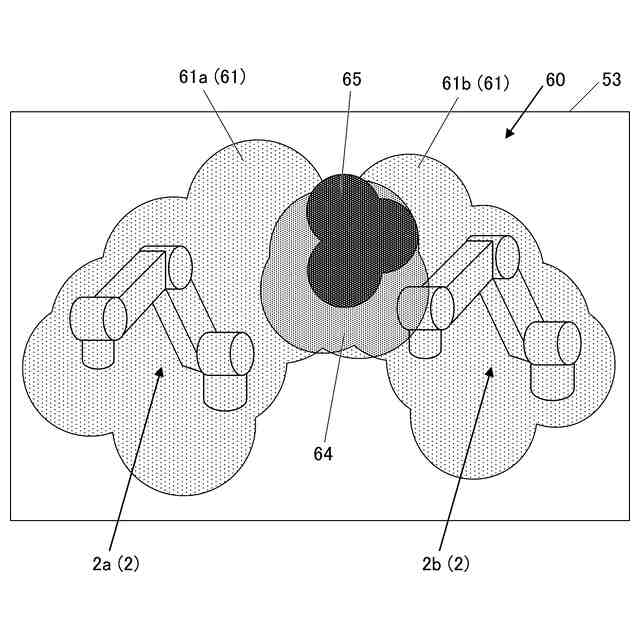
前記表示部は、複数の前記ロボットの画像を表示し、
前記表示制御部は、前記複数のロボットの動作領域のうち互いに重なる重複部分を、各動作領域とは異なる表示態様で前記表示部に表示させる、
請求項1に記載の教示装置。
【請求項4】
前記表示制御部は、前記重複部分のうち、前記複数のロボットの動作タイミングを加味して互いに干渉する干渉部分を、各動作領域及び前記重複部分のいずれとも異なる表示態様で前記表示部に表示させる、
請求項3に記載の教示装置。
【請求項5】
請求項1~4のいずれか一項に記載の教示装置と、
前記ロボットの画像を取得する撮影部と、
を備えるロボットシステム。
【請求項6】
ロボットを含むその周辺領域の画像を表示する表示部を備える教示装置の制御方法であって、
制御部が、
前記ロボットの動作領域を取得する取得工程と、
前記表示部に表示された前記ロボットの画像上に前記動作領域を重ねて表示させる表示制御工程と、
を実行する教示装置の制御方法。
【請求項7】
ロボットを含むその周辺領域の画像を表示する表示部を備える教示装置の制御プログラムであって、
コンピュータを、
前記ロボットの動作領域を取得する取得部、
前記表示部に表示された前記ロボットの画像上に前記動作領域を重ねて表示させる表示制御部、
として機能させる教示装置の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの教示を行う教示装置、ロボットシステム、教示装置の制御方法及び制御プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
作業を行うロボットに対してその動作を教えて記憶させる教示(ティーチング)を行う教示装置が知られている。
特許文献1に記載の教示装置では、ロボットの動作シミュレーションを作成した後に動作範囲を編集等した場合、編集後の動作範囲を仮想空間に画像表示している。
【先行技術文献】
【特許文献】
【0003】
特開2021-142596号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の技術では、ロボットの動作範囲(動作領域)をデジタル画像上でしか確認できない。
本発明は、上記事情に鑑みてなされたもので、ユーザがロボットの動作領域を把握しやすくなることを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る教示装置は、
ロボットを含むその周辺領域の画像を表示する表示部と、
前記ロボットの動作領域を取得する取得部と、
前記表示部に表示された前記ロボットの画像上に前記動作領域を重ねて表示させる表示制御部と、
を備える。
【発明の効果】
【0006】
本発明によれば、ユーザがロボットの動作領域を把握しやすくなる。
【図面の簡単な説明】
【0007】
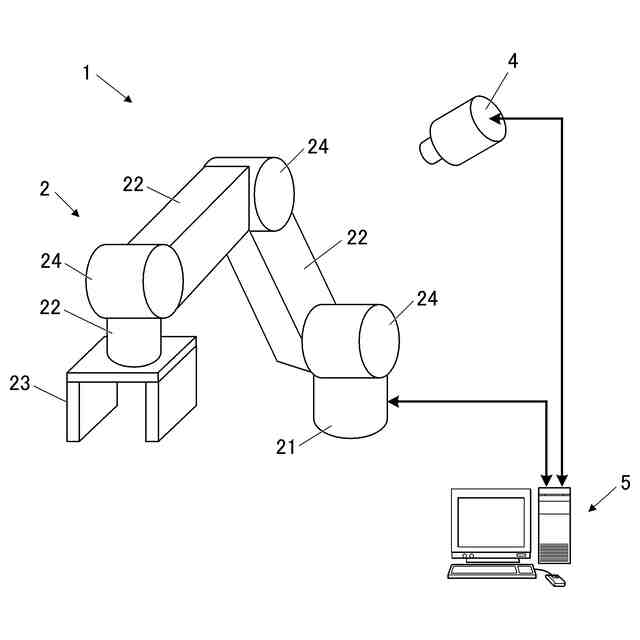
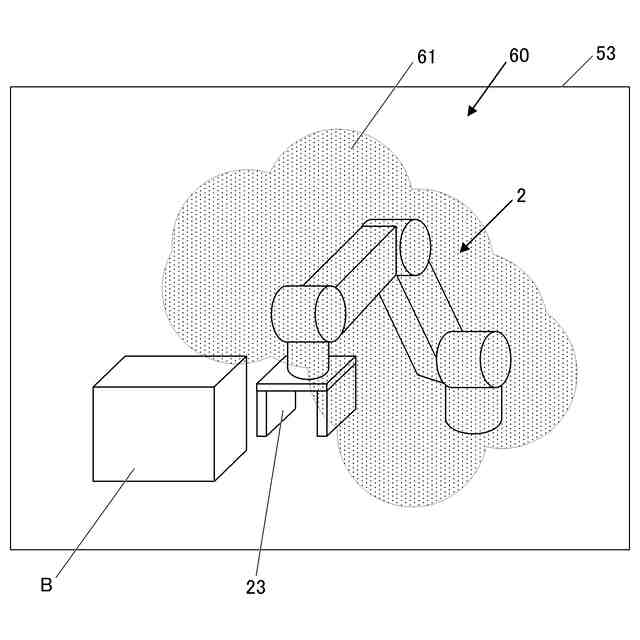
実施形態に係るロボットシステムを示す図である。
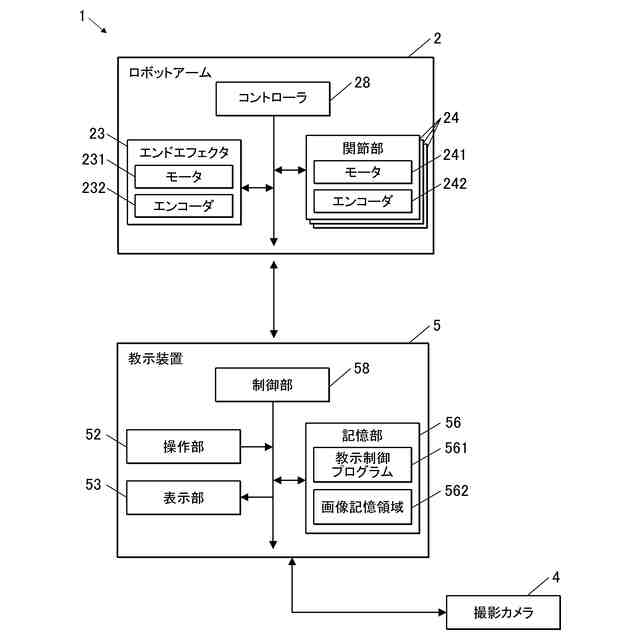
実施形態に係るロボットシステムの概略の制御構成を示すブロック図である。
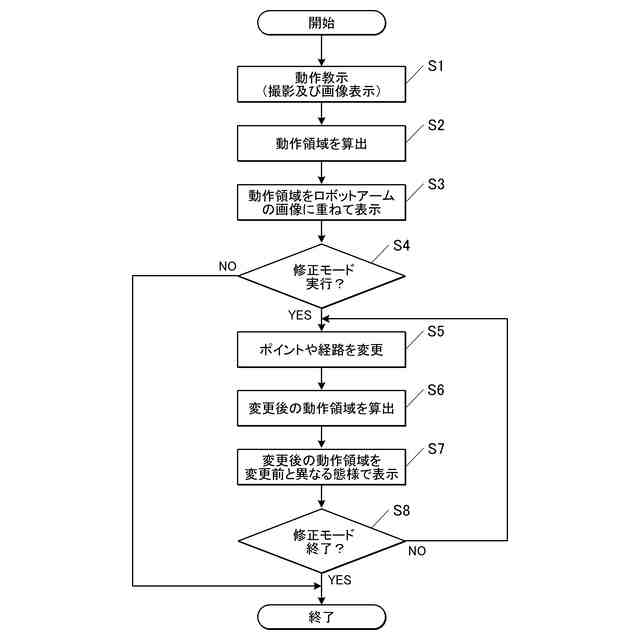
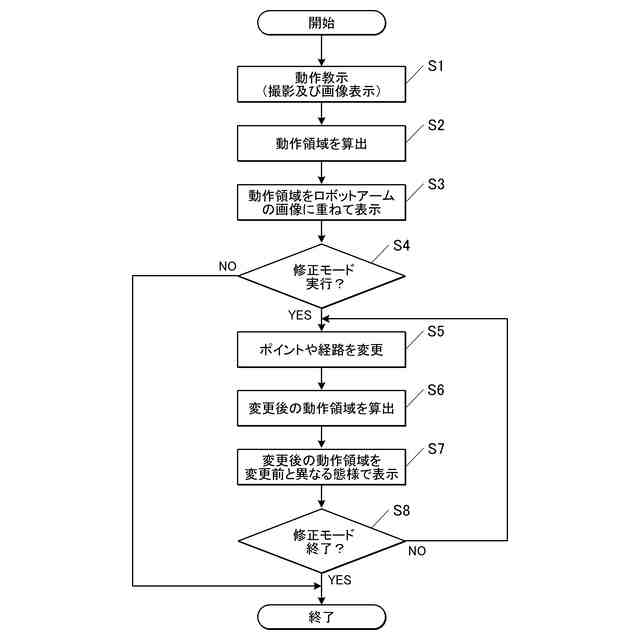
実施形態に係る教示制御処理の手順を示すフローチャートである。
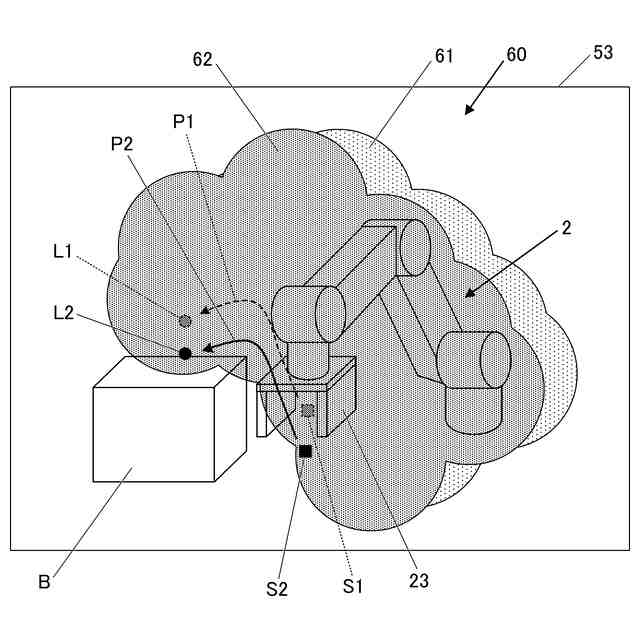
実施形態に係る教示制御処理における表示部の表示例を示す図である。
実施形態に係る教示制御処理における表示部の表示例を示す図である。
実施形態に係る教示制御処理における表示部の表示例を示す図である。
2台のロボットアームを運用する場合での表示部の表示例を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照して詳細に説明する。
【0009】
[ロボットシステムの構成]
図1は、本実施形態に係るロボットシステム1を示す図である。
この図に示すように、ロボットシステム1は、ロボットアーム2と、撮影カメラ4と、教示装置5とを備えている。
【0010】
ロボットアーム2は、本発明に係るロボットの一例に相当し、本実施形態では垂直多関節ロボットである。具体的に、ロボットアーム2は、ベース部21と、複数のアーム22と、エンドエフェクタ23と、複数の関節部24と、コントローラ28(図2参照)とを有している。
ただし、本発明に係るロボットは垂直多関節ロボットに限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
11日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
今日
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
搬送装置
4日前
個人
ペグハンマおよびペグハンマ用部品
4日前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
26日前
学校法人五島育英会
アーム機構
1か月前
住友重機械工業株式会社
支援装置
4日前
住友重機械工業株式会社
支援装置
4日前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
6日前
オークラ輸送機株式会社
ハンド装置
19日前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
4日前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
4日前
工機ホールディングス株式会社
作業機
今日
株式会社マキタ
電動作業機
1か月前
川崎重工業株式会社
ロボットシステム
20日前
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
今日
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ジャノメ
ロボット
28日前
SMC株式会社
ベルヌーイグリッパ
今日
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































