TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090179
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205260
出願日
2023-12-05
発明の名称
ネブライザ及びネブライザ用のプログラム
出願人
株式会社村田製作所
代理人
個人
,
個人
主分類
A61M
15/00 20060101AFI20250610BHJP(医学または獣医学;衛生学)
要約
【課題】粒子径及び粒子量の検出のためのセンサを搭載すると、ネブライザが大型化するおそれがある。
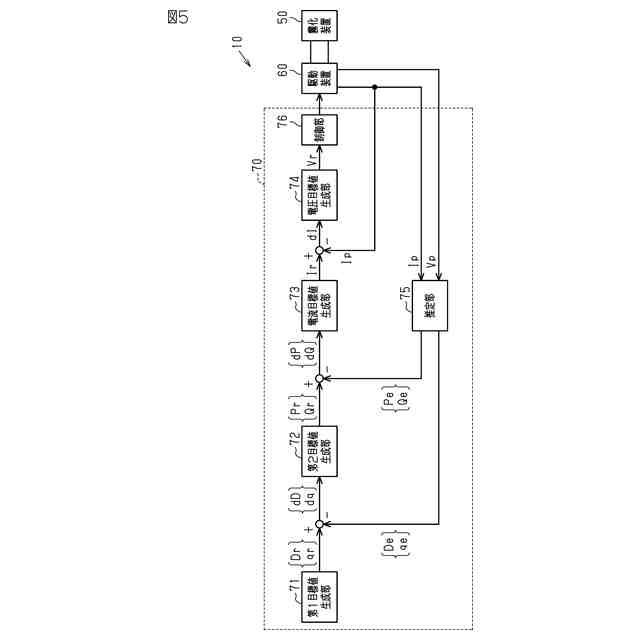
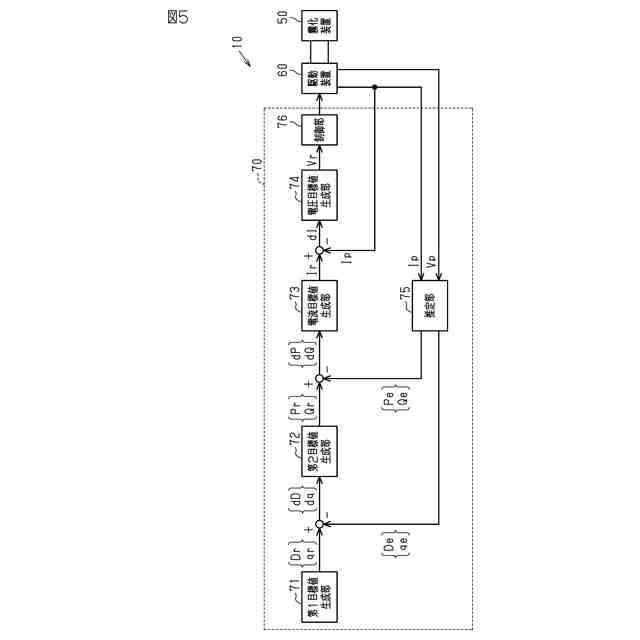
【解決手段】ネブライザ10は、液体を霧化可能な電動の霧化装置50と、駆動装置60と、制御装置70と、を備えている。粒子量及び粒子径から選ばれる1以上を制御状態量としたとき、制御装置70は、霧化装置50の駆動電流に基づいて、制御状態量の値を推定し、その推定結果を推定値として出力する。次いで、制御装置70は、当該制御状態量の目標値及び制御状態量の推定値の誤差に基づいて、駆動電流目標値Irを生成する。そして、制御装置70は、駆動電流目標値Irに基づいて駆動装置60を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
液体を霧化可能な電動の霧化装置と、
前記霧化装置に電力を供給する駆動装置と、
前記駆動装置を制御する制御装置と、
を備え、
前記霧化装置により霧化された液体の量を粒子量とし、
前記霧化装置により霧化された液体の粒子の直径を粒子径とし、
前記粒子量及び前記粒子径から選ばれる1以上を制御状態量としたとき、
前記制御装置は、
前記駆動装置により前記霧化装置に通電される駆動電流に基づいて前記制御状態量の値を推定し、その推定結果を推定値として出力する推定処理と、
前記制御状態量の目標値及び前記制御状態量の前記推定値の誤差に基づいて、前記駆動電流の目標値を生成する電流目標値生成処理と、
前記駆動電流の目標値に基づいて前記駆動装置を制御する駆動処理と、
を実行する
ネブライザ。
続きを表示(約 1,500 文字)
【請求項2】
前記制御装置は、前記推定処理において、前記駆動電流に加えて、前記駆動装置により前記霧化装置に印加される駆動電圧に基づいて前記制御状態量を推定し、その推定結果を前記推定値として出力する
請求項1に記載のネブライザ。
【請求項3】
周囲の温度である環境温度、周囲の気圧である環境気圧、及び周囲の湿度である環境湿度から選ばれる1つ以上の情報を環境情報としたとき、
前記推定処理において前記制御装置は、前記駆動電流に加えて前記環境情報に基づいて、前記制御状態量を推定し、その推定結果を前記推定値として出力する
請求項1に記載のネブライザ。
【請求項4】
前記制御装置は、前記駆動処理において、前記駆動電流の実値及び前記駆動電流の目標値に基づいて、前記駆動電流の実値が前記駆動電流の目標値に近付くように、前記駆動装置により前記霧化装置に印加される駆動電圧をフィードバック制御する
請求項1に記載のネブライザ。
【請求項5】
前記制御装置は、前記推定処理で出力した前記制御状態量の前記推定値と、当該推定処理を実行した時刻データとの組を外部へ出力可能である
請求項1に記載のネブライザ。
【請求項6】
前記制御装置は、前記駆動電流を反映するパラメータを含む複数の入力パラメータを入力として、前記制御状態量の前記推定値を出力するように予め機械学習された学習済みモデルを記憶しており、
前記推定処理において、前記複数の入力パラメータを前記学習済みモデルに入力することにより前記制御状態量の前記推定値を出力する
請求項1に記載のネブライザ。
【請求項7】
前記霧化装置は、気体を圧送して液体に吹き付けることにより当該液体を霧化可能なブロアであり、
前記制御状態量を第1制御状態量とし、前記推定処理を第1推定処理とし、前記推定値を第1推定値とし、
前記霧化装置により圧送される前記気体の圧力、及び前記霧化装置により圧送される前記気体の流量から選ばれる1以上を第2制御状態量としたとき、
前記制御装置は、
前記駆動電流に基づいて前記第2制御状態量の値を推定し、その推定結果を第2推定値として出力する第2推定処理を実行し、
前記電流目標値生成処理において、
前記第1制御状態量の目標値及び前記第1制御状態量の前記第1推定値の誤差に基づいて生成した前記第2制御状態量の目標値と、前記第2制御状態量の前記第2推定値と、の誤差に基づいて、前記駆動電流の目標値を生成する
請求項1に記載のネブライザ。
【請求項8】
周囲の温度である環境温度、周囲の気圧である環境気圧、及び周囲の湿度である環境湿度から選ばれる1つ以上の情報を環境情報としたとき、
前記第2推定処理において前記制御装置は、前記駆動電流に加えて前記環境情報に基づいて、前記第2制御状態量を推定し、その推定結果を前記第2推定値として出力する
請求項7に記載のネブライザ。
【請求項9】
前記制御装置は、前記推定処理において、前記駆動電流に加えて、前記霧化装置に供給する交流電力の駆動周波数に基づいて前記制御状態量を推定し、その推定結果を前記推定値として出力する
請求項1に記載のネブライザ。
【請求項10】
前記制御装置は、前記駆動処理において、前記駆動電流の実値及び前記駆動電流の目標値に基づいて、前記駆動電流の実値が前記駆動電流の目標値に近付くように、前記駆動周波数をフィードバック制御する
請求項9に記載のネブライザ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ネブライザ及びネブライザ用のプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
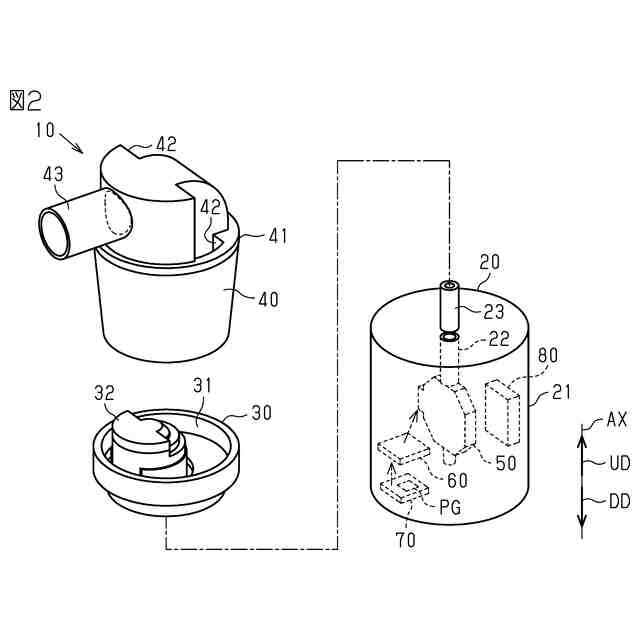
特許文献1に開示されているネブライザは、タンク本体と、筐体と、霧化装置と、吐出ノズルと、駆動装置と、制御装置と、を備えている。タンク本体は、その内部に液体を貯留可能である。筐体の内部は、供給管を介してタンク本体に通じている。霧化装置は、筐体と供給管との間に連結している。霧化装置は、タンク本体から供給を受けた液体を霧化する。吐出ノズルは、筐体に接続している。霧化された液体は、吐出ノズルから外部へ吐出される。駆動装置は、霧化装置が駆動するための電力を供給する。制御装置は、駆動装置を制御する。
【0003】
また、特許文献1に開示されているネブライザは、粒子量検出部と、粒子径検出部と、を備えている。粒子量検出部は、霧化された液体の粒子量を検出する。粒子径検出部は、霧化された液体の粒子径を検出する。制御装置は、粒子量検出部により検出された粒子量と、粒子径検出部により検出された粒子径とを用いて駆動装置を制御する。制御装置は、駆動装置を制御することにより、霧化された液体の粒子量及び粒子径を制御する。
【先行技術文献】
【特許文献】
【0004】
特開2018-130224号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されているようなネブライザにおいて、粒子量検出部及び粒子径検出部には、例えば、光学系を利用したセンサを採用できる。当該光学系のセンサは、例えば、粒子に光を照射するための光源、散乱光等を検出するための受光素子等により構成される。したがって、粒子量検出部及び粒子径検出部として、このような光学系のセンサを搭載すると、ネブライザが大型化するおそれがある。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明は、液体を霧化可能な電動の霧化装置と、前記霧化装置に電力を供給する駆動装置と、前記駆動装置を制御する制御装置と、を備え、前記霧化装置により霧化された液体の量を粒子量とし、前記霧化装置により霧化された液体の粒子の直径を粒子径とし、前記粒子量及び前記粒子径から選ばれる1以上を制御状態量としたとき、前記制御装置は、前記駆動装置により前記霧化装置に通電される駆動電流に基づいて前記制御状態量の値を推定し、その推定結果を推定値として出力する推定処理と、前記制御状態量の目標値及び前記制御状態量の前記推定値の誤差に基づいて、前記駆動電流の目標値を生成する電流目標値生成処理と、前記駆動電流の目標値に基づいて前記駆動装置を制御する駆動処理と、を実行するネブライザである。
【0007】
また、本発明は、液体を霧化可能な電動の霧化装置と、前記霧化装置に電力を供給する駆動装置と、前記駆動装置を制御する制御装置と、を備えるネブライザに適用され、前記霧化装置により霧化された液体の量を粒子量とし、前記霧化装置により霧化された液体の粒子の直径を粒子径とし、前記粒子量及び前記粒子径から選ばれる1以上を制御状態量としたとき、前記制御装置に、前記駆動装置により前記霧化装置に通電される駆動電流に基づいて前記制御状態量の値を推定し、その推定結果を推定値として出力する推定処理と、前記制御状態量の目標値及び前記制御状態量の前記推定値の誤差に基づいて、前記駆動電流の目標値を生成する電流目標値生成処理と、前記駆動電流の目標値に基づいて前記駆動装置を制御する駆動処理と、を実行させるネブライザ用のプログラムである。
【発明の効果】
【0008】
ネブライザが大型化することを抑制できる。
【図面の簡単な説明】
【0009】
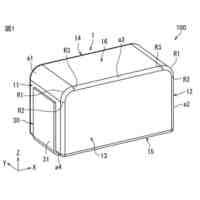
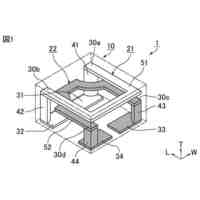
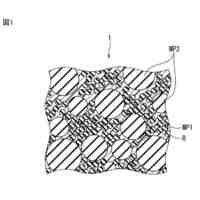
図1は、ネブライザの斜視図である。
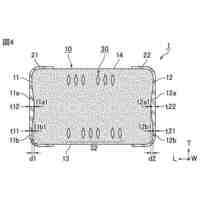
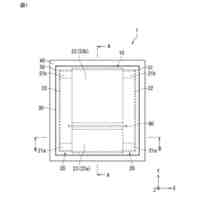
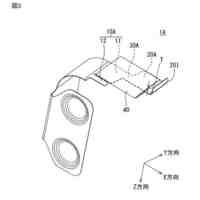
図2は、ネブライザの分解斜視図である。
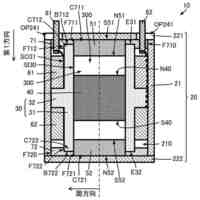
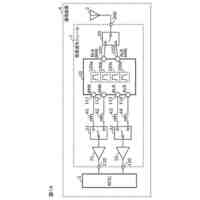
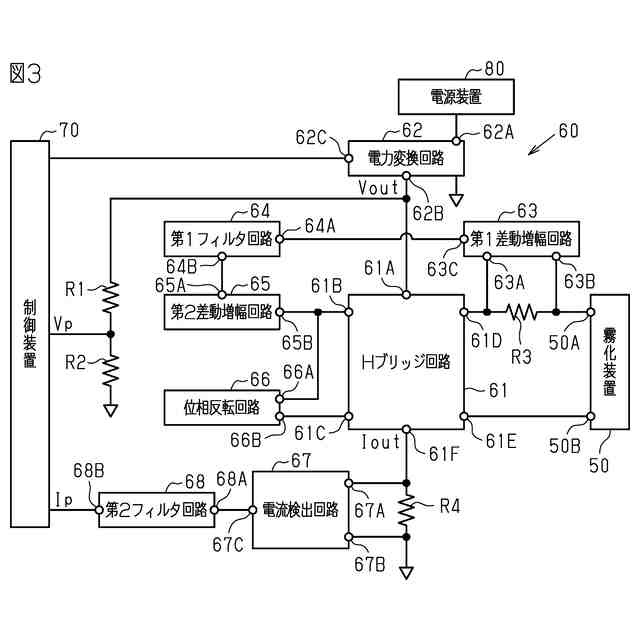
図3は、第1実施形態の駆動装置の概略構成を説明する説明図である。
図4は、Hブリッジ回路の回路図である。
図5は、第1実施形態のフィードバック制御を説明するブロック図である。
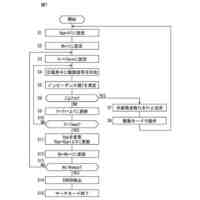
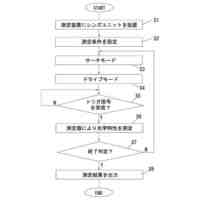
図6は、第1実施形態のフィードバック制御を説明するフローチャートである。
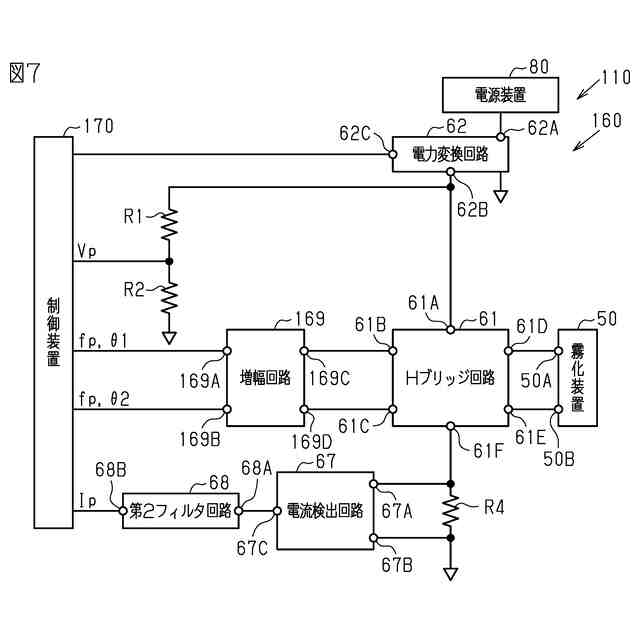
図7は、第2実施形態の駆動装置の概略構成を説明する説明図である。
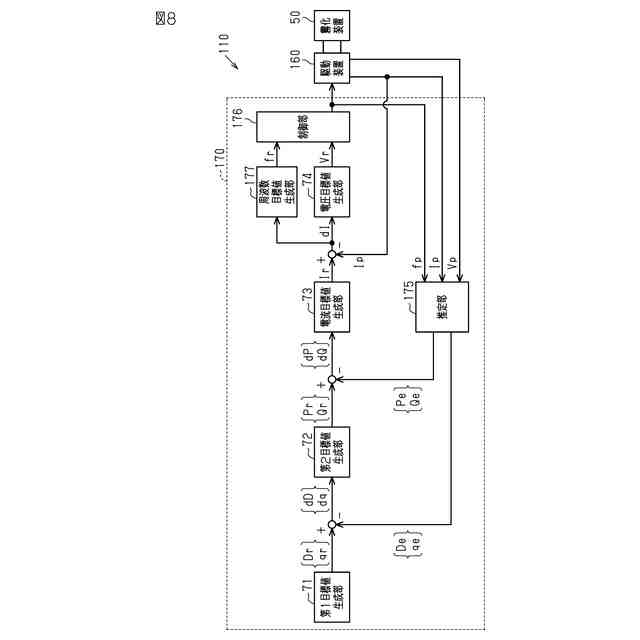
図8は、第2実施形態のフィードバック制御を説明するブロック図である。
図9は、第2実施形態のフィードバック制御を説明するフローチャートである。
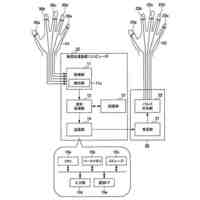
図10は、変更例におけるネブライザの構成を説明する説明図である。
【発明を実施するための形態】
【0010】
以下、ネブライザ及びネブライザ用のプログラムの実施形態を説明する。なお、図面は、理解を容易にするために構成要素を拡大して示している場合がある。構成要素の寸法比率は実際のものと、又は別の図面中のものと異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社村田製作所
コイル部品
今日
株式会社村田製作所
樹脂組成物
5日前
株式会社村田製作所
コイル部品
13日前
株式会社村田製作所
振動モータ
8日前
株式会社村田製作所
アンテナ装置
今日
株式会社村田製作所
積層コイル部品
27日前
株式会社村田製作所
積層コイル部品
27日前
株式会社村田製作所
積層コイル部品
27日前
株式会社村田製作所
積層コイル部品
5日前
株式会社村田製作所
電子回路モジュール
28日前
株式会社村田製作所
弾性波装置の製造方法
2日前
株式会社村田製作所
コンデンサモジュール
7日前
株式会社村田製作所
磁性体およびインダクタ
2日前
株式会社村田製作所
積層セラミックコンデンサ
28日前
株式会社村田製作所
インダクタ、及びインダクタの製造方法
2日前
株式会社村田製作所
タブ、電池モジュールおよび電池パック
8日前
株式会社村田製作所
積層電子部品の製造方法及び離型フィルム
5日前
株式会社村田製作所
積層電子部品の製造方法及び離型フィルム
5日前
株式会社村田製作所
積層電子部品の製造方法及び離型フィルム
5日前
株式会社村田製作所
積層電子部品の製造方法及び離型フィルム
5日前
株式会社村田製作所
複合フィルタ部品および高周波モジュール
8日前
株式会社村田製作所
積層コイル部品及び積層コイル部品の製造方法
27日前
H2L株式会社
触覚検出装置及び触覚伝達システム
27日前
株式会社村田製作所
振動装置を制御する制御装置及び振動装置を制御する方法
21日前
株式会社村田製作所
半導体装置
1日前
株式会社村田製作所
半導体装置
1日前
株式会社村田製作所
半導体装置
1日前
株式会社村田製作所
医薬組成物、腸内細菌叢の改善方法、治療方法および予防方法
12日前
株式会社村田製作所
コンデンサモジュールおよびコンデンサモジュールの製造方法
1日前
株式会社村田製作所
マルチプレクサ
27日前
株式会社村田製作所
インダクタ部品
5日前
株式会社村田製作所
インダクタ部品
5日前
マクセル株式会社
レンズユニットの光学特性測定方法及び測定装置
1日前
株式会社村田製作所
積層セラミックコンデンサ
7日前
株式会社村田製作所
積層セラミックコンデンサ
1か月前
ハイドロ-ケベック
電極物質およびそれらの調製のためのプロセス
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ