TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087850
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2025035981,2023085837
出願日
2025-03-07,2020-03-04
発明の名称
監視システム、人工衛星および地上設備
出願人
三菱電機株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
B64G
1/10 20060101AFI20250603BHJP(航空機;飛行;宇宙工学)
要約
【課題】人工衛星から監視対象を監視できるようにする。
【解決手段】監視システム100は、軌道を1日に整数回周回する人工衛星101を備える。前記軌道が、太陽同期軌道であり且つ傾斜軌道であり且つ円軌道である。人工衛星101が、監視対象の地方時が12時となるタイミングに前記軌道の最北点を飛行する。人工衛星101が、前記監視対象を監視するための監視装置102と、前記監視装置の監視方向を変更するためのポインティング機能と、前記ポインティング機能を制御することによって前記監視方向を前記監視対象に向ける監視制御装置110と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
軌道を1日に整数回周回する人工衛星を備え、
前記軌道が、太陽同期軌道であり且つ傾斜軌道であり且つ円軌道であり、
前記人工衛星が、監視対象の地方時が12時となるタイミングに前記軌道の最北点を飛行し、
前記人工衛星が、
前記監視対象を監視するための監視装置と、
前記監視装置の監視方向を変更するためのポインティング機能と、
前記ポインティング機能を制御することによって前記監視方向を前記監視対象に向ける監視制御装置と、を備える
監視システム。
続きを表示(約 620 文字)
【請求項2】
軌道を飛行する人工衛星を備え、
前記軌道が、太陽同期軌道であり且つ傾斜軌道であり且つ楕円軌道であり、
前記人工衛星が、監視対象の地方時が12時となるタイミングに前記軌道の近地点を飛行し、
前記人工衛星が、
前記監視対象を監視するための監視装置と、
前記監視装置の監視方向を変更するためのポインティング機能と、
前記ポインティング機能を制御することによって前記監視方向を前記監視対象に向ける監視制御装置と、を備える
監視システム。
【請求項3】
3機の人工衛星を備え、
各人工衛星の軌道が、太陽同期軌道であり且つ傾斜軌道であり且つ楕円軌道であり、
前記3機の人工衛星の3つの軌道が、互いの軌道長軸が緯度方向において120度ずつずれて傾くように配置され、
各人工衛星が、
監視対象を監視するための監視装置と、
前記監視装置の監視方向を変更するためのポインティング機能と、
前記ポインティング機能を制御することによって前記監視方向を前記監視対象に向ける監視制御装置と、を備える
監視システム。
【請求項4】
請求項1から請求項3のいずれか1項に記載の監視システムを構成する人工衛星。
【請求項5】
請求項1から請求項3のいずれか1項に記載の監視システムを制御する地上設備。
発明の詳細な説明
【技術分野】
【0001】
本開示は、地球または宇宙空間の物体を宇宙から監視するためのシステムに関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
地球を周回する人工衛星によって地球の対象地域を監視するシステムが知られている。
特許文献1は、地球を周回する複数の観測衛星群を用いて観測目標地域を観測するシステムを開示している。
システムの構築コストは、使用される人工衛星の数が多いほど高くなる。
【先行技術文献】
【特許文献】
【0003】
特開2008-126876号公報
【非特許文献】
【0004】
Ryan Anderson,“Thermal Environment for Polar Communications and Weather System in the Telesat-Tundra Orbit”,Carleton University,(加),2014年
【発明の概要】
【発明が解決しようとする課題】
【0005】
本開示は、人工衛星から監視対象を監視できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本開示の監視システムは、
軌道を1日に整数回周回する人工衛星を備え、
前記軌道が、太陽同期軌道であり且つ傾斜軌道であり且つ円軌道であり、
前記人工衛星が、監視対象の地方時が12時となるタイミングに前記軌道の最北点を飛行し、
前記人工衛星が、
前記監視対象を監視するための監視装置と、
前記監視装置の監視方向を変更するためのポインティング機能と、
前記ポインティング機能を制御することによって前記監視方向を前記監視対象に向ける監視制御装置と、を備える。
【発明の効果】
【0007】
本開示によれば、人工衛星から監視対象を監視することが可能となる。
【図面の簡単な説明】
【0008】
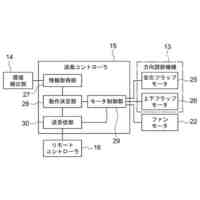
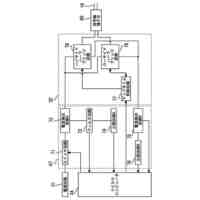
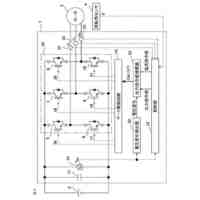
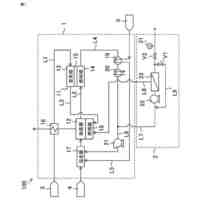
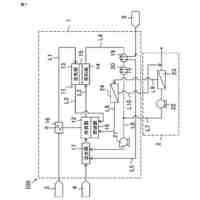
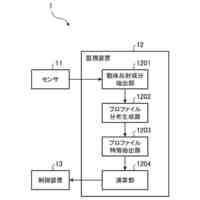
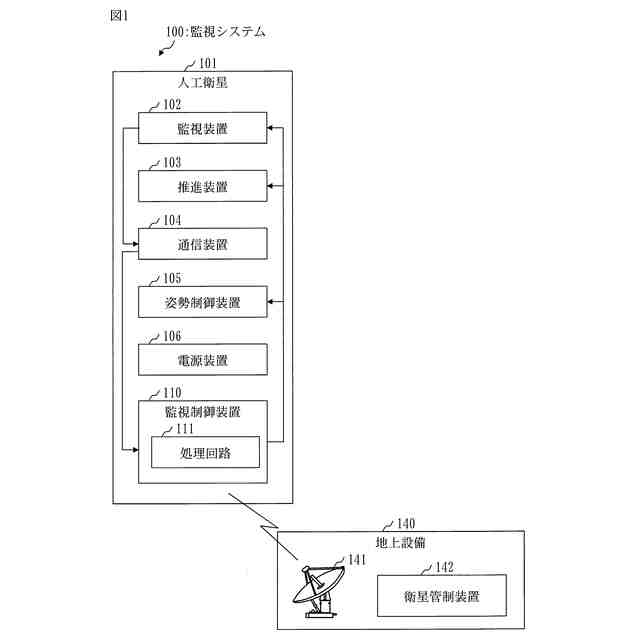
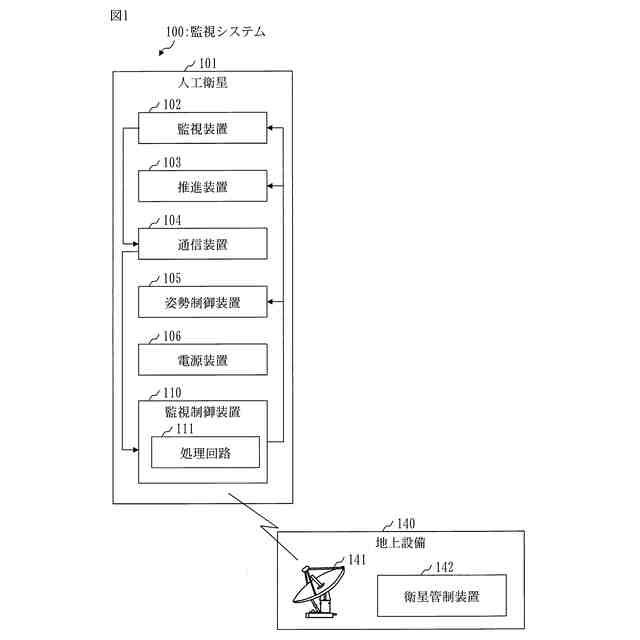
実施の形態1における監視システム100および地上設備140の構成図。
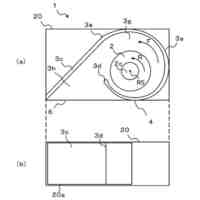
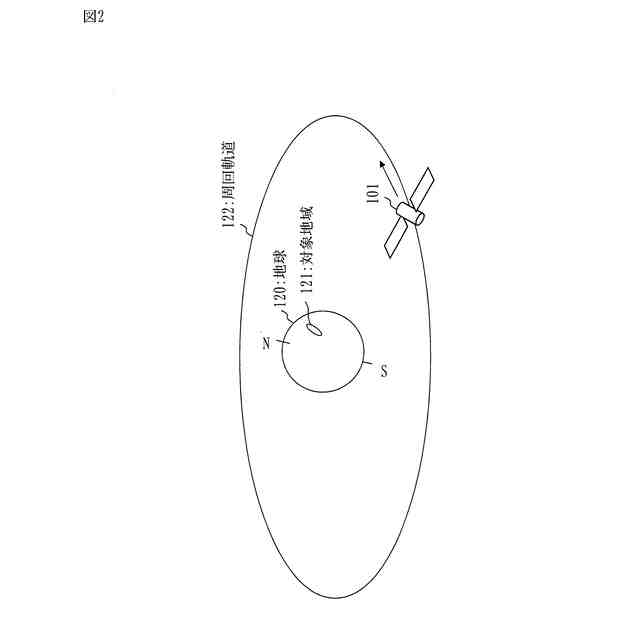
実施の形態1における周回軌道122を示す図。
実施の形態1における衛星速度と衛星高度の関係図。
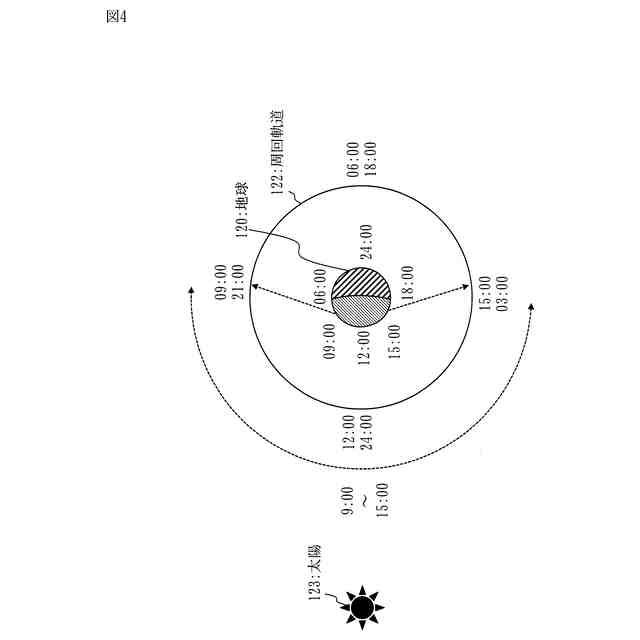
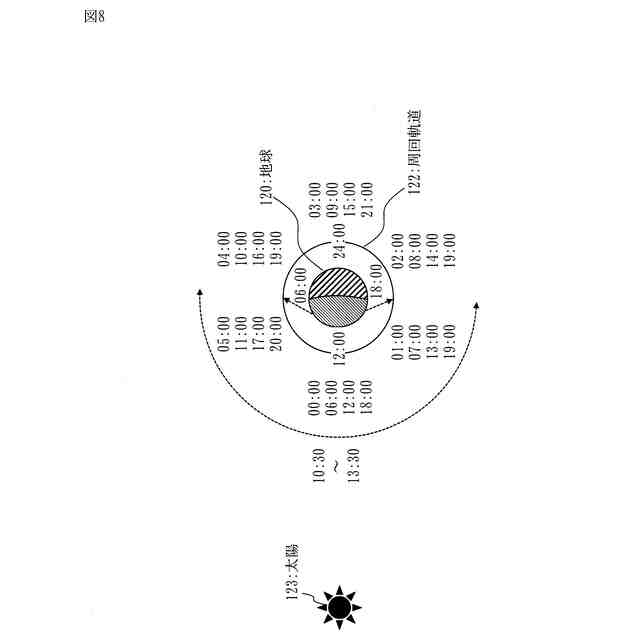
実施の形態1における周回軌道122と監視時間の関係図。
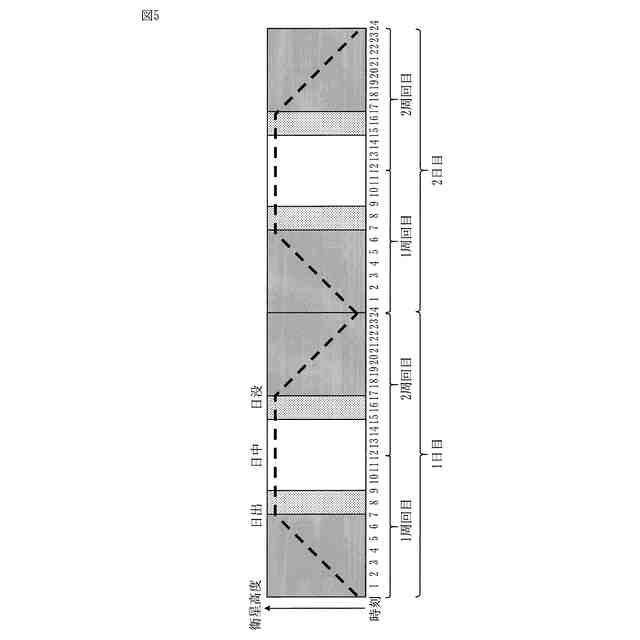
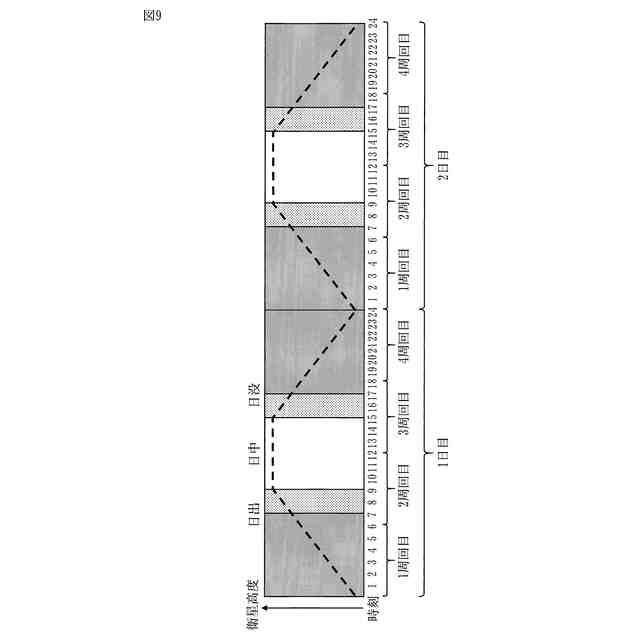
実施の形態1における衛星高度の変化を示す図。
実施の形態2における周回軌道122と監視時間の関係図。
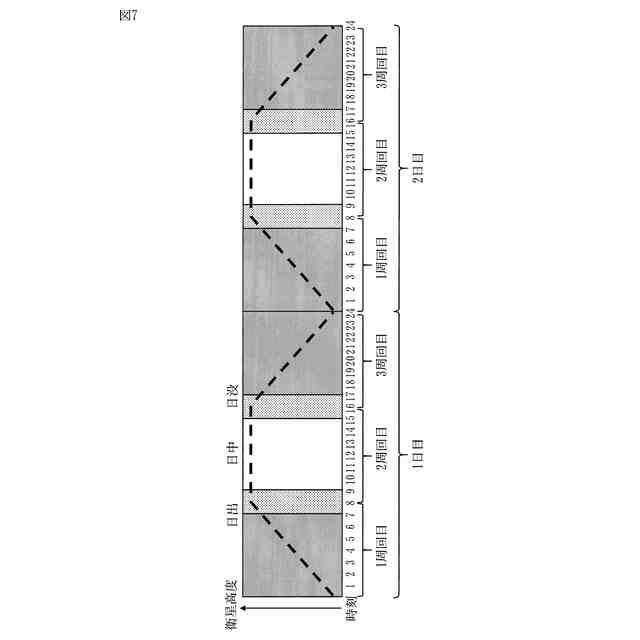
実施の形態2における衛星高度の変化を示す図。
実施の形態3における周回軌道122と監視時間の関係図。
実施の形態3における衛星高度の変化を示す図。
実施の形態4における周回軌道122と監視時間の関係図。
実施の形態4における衛星高度の変化を示す図。
実施の形態5における周回軌道122と監視時間の関係図。
実施の形態5における周回軌道122と人工衛星101と太陽123の関係図。
実施の形態5における周回軌道122と監視時間の関係図。
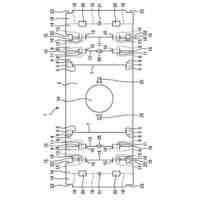
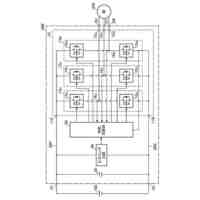
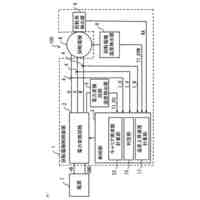
実施の形態7における衛星コンステレーション130の構成図。
実施の形態7における衛星コンステレーション130の構成図。
実施の形態7における衛星コンステレーション130の動きを示す図。
実施の形態7における衛星コンステレーション130の動きを示す図。
実施の形態7における衛星コンステレーション130の動きを示す図。
実施の形態7における軌道高度と緯度の関係を示すグラフ。
実施の形態8における周回軌道122を示す図。
実施の形態9における周回軌道122を示す図。
実施の形態10における周回軌道122を示す図。
実施の形態11における周回軌道122を示す図。
実施の形態11における周回軌道122を示す図。
実施の形態11における周回軌道122を示す図。
【発明を実施するための形態】
【0009】
実施の形態および図面において、同じ要素または対応する要素には同じ符号を付している。説明した要素と同じ符号が付された要素の説明は適宜に省略または簡略化する。
【0010】
実施の形態1.
監視システム100について、図1から図5に基づいて説明する。
監視システム100は、地球の地物または宇宙空間の物体などの監視対象を監視時間帯の自由度が高くて好ましい観測条件で宇宙から監視するためのシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
吸音体
27日前
三菱電機株式会社
冷蔵庫
13日前
三菱電機株式会社
電子機器
14日前
三菱電機株式会社
送風装置
25日前
三菱電機株式会社
梱包装置
10日前
三菱電機株式会社
照明装置
14日前
三菱電機株式会社
照明装置
18日前
三菱電機株式会社
半導体装置
28日前
三菱電機株式会社
半導体装置
17日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
電気掃除機
28日前
三菱電機株式会社
遠心送風機
27日前
三菱電機株式会社
飛しょう体
27日前
三菱電機株式会社
加熱調理器
28日前
三菱電機株式会社
制御システム
13日前
三菱電機株式会社
貯湯式給湯機
17日前
三菱電機株式会社
電力変換装置
17日前
三菱電機株式会社
給湯システム
11日前
三菱電機株式会社
照明システム
18日前
三菱電機株式会社
電力変換装置
5日前
三菱電機株式会社
電力変換装置
21日前
三菱電機株式会社
電力変換装置
11日前
三菱電機株式会社
非可逆回路素子
28日前
三菱電機株式会社
誘導加熱調理器
27日前
三菱電機株式会社
電磁ピンセット
13日前
三菱電機株式会社
燃料電池システム
4日前
三菱電機株式会社
照明制御システム
5日前
三菱電機株式会社
回転電機制御装置
20日前
三菱電機株式会社
燃料電池システム
6日前
三菱電機株式会社
無線通信システム
6日前
三菱電機株式会社
回転電機及び固定子
6日前
三菱電機株式会社
半導体素子駆動装置
26日前
三菱電機株式会社
監視装置および監視方法
24日前
三菱電機株式会社
掃除機および掃除システム
21日前
三菱電機株式会社
トレーラ走行経路出力装置
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ