TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087491
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023202190
出願日
2023-11-29
発明の名称
座標回転処理装置、位相限定相関演算装置およびそれらの方法、プログラム
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G06F
17/14 20060101AFI20250603BHJP(計算;計数)
要約
【課題】2つの入力ベクトルの偏角の差を新たな偏角とし、それら入力ベクトルに依存しない大きさ(強さ)を有する出力ベクトルを得る回路を小規模で実現する座標回転処理装置、位相限定相関演算装置およびそれらの方法とプログラムを提供する。
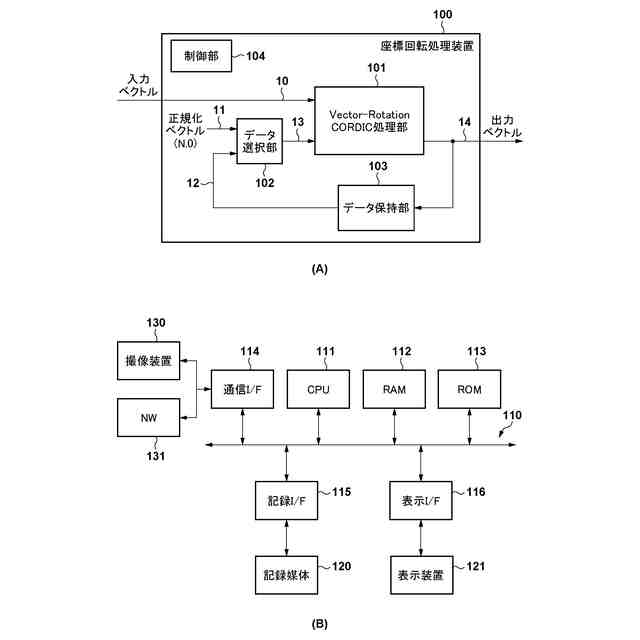
【解決手段】二つの画像の対応付けのための位相限定相関演算装置に利用することができる座標回転処理装置100であって、CORDIC処理部101は、第1入力ベクトルに基づくベクトルと直交座標が(N,0)で表される正規化ベクトルを入力して、第1入力ベクトルの偏角を有する正規化第1ベクトルを得る第1位相処理と、CORDIC処理部に、第2入力ベクトルと正規化第1ベクトルに基づくベクトルを入力して、第1入力ベクトルと第2入力ベクトルの偏角の差を偏角とする出力ベクトルを得る第2位相処理と、を行う。
【選択図】図1
特許請求の範囲
【請求項1】
2つのベクトルの入力に応じて、前記2つのベクトルのうちの一方のベクトルを他方のベクトルの偏角だけ回転した偏角と、前記一方のベクトルの大きさにスケーリング係数を乗じた大きさとを有するベクトルを出力するCORDIC処理部と、
前記CORDIC処理部を用いて、第1入力ベクトルと、直交座標が(N,0)で表される正規化ベクトルとから、前記第1入力ベクトルの偏角と前記正規化ベクトルの大きさに前記スケーリング係数を乗じた大きさとを有する正規化第1ベクトルを生成する第1位相処理手段と、
前記CORDIC処理部を用いて、第2入力ベクトルと前記正規化第1ベクトルとから、前記正規化第1ベクトルを前記第2入力ベクトルの偏角だけ回転した偏角と前記正規化第1ベクトルの大きさに前記スケーリング係数を乗じた大きさとを有する出力ベクトルを生成する第2位相処理手段と、を備えることを特徴とする座標回転処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記スケーリング係数は前記CORDIC処理部の回転回数に依存した係数であり、回転回数をiとすると(1+2
-2i
)1/2で表される、ことを特徴とする請求項1に記載の座標回転処理装置。
【請求項3】
前記第1位相処理手段は、前記第1入力ベクトルと前記正規化ベクトルを前記CORDIC処理部に入力して前記第1入力ベクトルの偏角の方向へ回転された前記正規化第1ベクトルを取得し、前記第2位相処理手段は、前記第2入力ベクトルと前記正規化第1ベクトルの共役のベクトルを前記CORDIC処理部に入力することにより、前記第1入力ベクトルと前記第2入力ベクトルの偏角の差を偏角とする前記出力ベクトルを得ることを特徴とする請求項1に記載の座標回転処理装置。
【請求項4】
前記第1位相処理手段は、前記第1入力ベクトルと前記正規化ベクトルを前記CORDIC処理部に入力して前記第1入力ベクトルの偏角と逆の方向へ回転された前記正規化第1ベクトルを取得し、前記第2位相処理手段は、前記第2入力ベクトルと前記正規化第1ベクトルを前記CORDIC処理部に入力して前記第2入力ベクトルの偏角と同じ方向へ回転された前記出力ベクトルを取得することにより、前記第1入力ベクトルと前記第2入力ベクトルの偏角の差を偏角とする前記出力ベクトルを得ることを特徴とする請求項1に記載の座標回転処理装置。
【請求項5】
前記第1入力ベクトルまたは前記第2入力ベクトルの更新に応じて前記第1位相処理手段と前記第2位相処理手段のそれぞれが処理を実行して前記出力ベクトルを生成するように制御する制御手段をさらに備えることを特徴とする請求項1に記載の座標回転処理装置。
【請求項6】
前記第1位相処理手段が前記第1入力ベクトルの入力に応じて処理を実行し、前記第1位相処理手段が処理を実行した後は、前記第2位相処理手段が前記第2入力ベクトルの入力または前記第2入力ベクトルの更新に応じて処理を実行して前記出力ベクトルを生成するように制御する制御手段をさらに備えることを特徴とする請求項1に記載の座標回転処理装置。
【請求項7】
前記正規化第1ベクトルを表す直交座標データから、2つの軸のデータのうちの一方の軸のデータを用いて他方の軸のデータを用いずに前記正規化第1ベクトルを表す圧縮データを生成し保持部に保持する圧縮手段と、
前記保持部に保持された前記圧縮データの前記一方の軸のデータに基づいて前記直交座標データの前記他方の軸のデータを生成することにより、前記正規化第1ベクトルを復元して前記第2位相処理手段に提供するベクトル生成手段と、を更に備えることを特徴とする請求項1に記載の座標回転処理装置。
【請求項8】
前記直交座標データの2つの軸のデータのうち値が小さい方のデータの軸が前記一方の軸のデータとして用いられることを特徴とする請求項7に記載の座標回転処理装置。
【請求項9】
前記ベクトル生成手段は、前記一方の軸のデータから前記他方の軸のデータを生成するために、前記正規化第1ベクトルの強度を半径とする円軌道の関数、または、前記円軌道の近似関数、または、ルックアップテーブル、を用いることを特徴とする請求項7に記載の座標回転処理装置。
【請求項10】
ベクトルを表す直交座標データの、それぞれが浮動小数で表現される第1のデータと第2のデータの指数部を共通化することにより、指数部が共通化された直交座標データを前記CORDIC処理部に提供する共通化手段を更に備える、ことを特徴とする請求項1に記載の座標回転処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、座標回転処理装置、位相限定相関演算装置およびそれらの方法、プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から通信分野、画像・映像信号処理分野において、二つの信号や画像の対応付け(マッチング、位置合わせ)を行う技術がある。例えば、特許文献1のようにステレオビジョンにおける左側と右側の二つの画像における対象物の位置合わせをおこなうことにより測距や3次元計測が可能となる。また特許文献2のように登録されたマーカー画像を撮影画像から探索し位置合わせすることによって、例えばリソグラフィ装置の基板の位置決めが実施される。近年では、上述の計測精度や位置合わせ精度を向上するために撮像した画像の画素(ピクセル)よりも高精度なサブピクセル精度で、撮像対象や撮影条件に依存しないロバストな位置合わせの要求が高まっている。その要求に応えるために、位相限定相関関数を用いる手法が知られている(特許文献1ならびに非特許文献1)。
【0003】
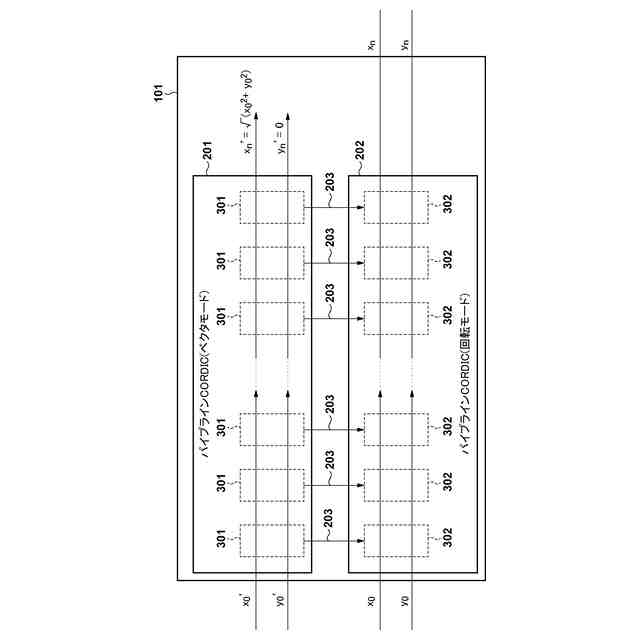
一方、位相限定相関関数を用いる手法は、二次元離散的フーリエ変換に要する計算量ならびに、二つの画像に対する位相演算(ベクトル演算)に要する計算量が多くなる。軽量なベクトル演算の手法として、ビットシフトと加減算の繰り返しのみで座標回転を実現することが可能な「CORDIC」と呼ばれる座標データ回転演算器が非特許文献2に開示されている。また、特許文献3及び特許文献4には、ベクタモードのCORDIC及び回転モードのCORDICが開示されている。ベクタモードのCORDICは、直交座標を極座標に変換し、二次元座標の原点からの距離(絶対値)を出力する。回転モードのCORDICは、ベクタモードで得られた偏角情報を回転角として入力し、他の直交座標を回転角だけ回転した直交座標を出力する。
【先行技術文献】
【特許文献】
【0004】
特開2010-071922号公報
特開2017-015994号公報
特許第3283504号公報
特開2017-123057号公報
【非特許文献】
【0005】
長嶋聖、青木孝文、樋口龍雄、小林孝次、「位相限定相関法に基づくサ ブピクセル画像マッチングの高性能化」、計測自動制御学会東北支部 第218回研究集 会(2004.10.9)、資料番号218-15
J. E. Volder. "The CORDIC trigonometric computing technique", IRE Transactions on Electronic Computers, EC-8:330-334, 1959.
【発明の概要】
【発明が解決しようとする課題】
【0006】
位相限定相関演算では二つの入力ベクトルの偏角の差を新たな偏角とする、正規化された出力ベクトルを生成する必要がある。特許文献3では、そのような出力ベクトルを生成する構成について何等示唆していない。また、特許文献4では、2つの入力ベクトルの偏角の差を持つ出力ベクトルを得ることはできるが、正規化された出力ベクトルを得るために正規化処理を行う回路(絶対値算出と除算を行う回路)が必要となり、回路規模が大きくなる。
【0007】
本発明は、2つの入力ベクトルの偏角の差を新たな偏角とし、それら入力ベクトルに依存しない大きさ(強さ)を有する出力ベクトルを得る回路を小規模で実現することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様による座標回転処理装置は、
2つのベクトルの入力に応じて、前記2つのベクトルのうちの一方のベクトルを他方のベクトルの偏角だけ回転した偏角と、前記一方のベクトルの大きさにスケーリング係数を乗じた大きさとを有するベクトルを出力するCORDIC処理部と、
前記CORDIC処理部を用いて、第1入力ベクトルと、直交座標が(N,0)で表される正規化ベクトルとから、前記第1入力ベクトルの偏角と前記正規化ベクトルの大きさに前記スケーリング係数を乗じた大きさとを有する正規化第1ベクトルを生成する第1位相処理手段と、
前記CORDIC処理部を用いて、第2入力ベクトルと前記正規化第1ベクトルとから、前記正規化第1ベクトルを前記第2入力ベクトルの偏角だけ回転した偏角と前記正規化第1ベクトルの大きさに前記スケーリング係数を乗じた大きさとを有する出力ベクトルを生成する第2位相処理手段と、を備える。
【発明の効果】
【0009】
本発明によれば、2つの入力ベクトルの偏角の差を新たな偏角とし、それら入力ベクトルに依存しない大きさ(強さ)を有する出力ベクトルを得る回路を小規模で実現することができる。
【図面の簡単な説明】
【0010】
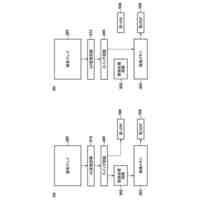
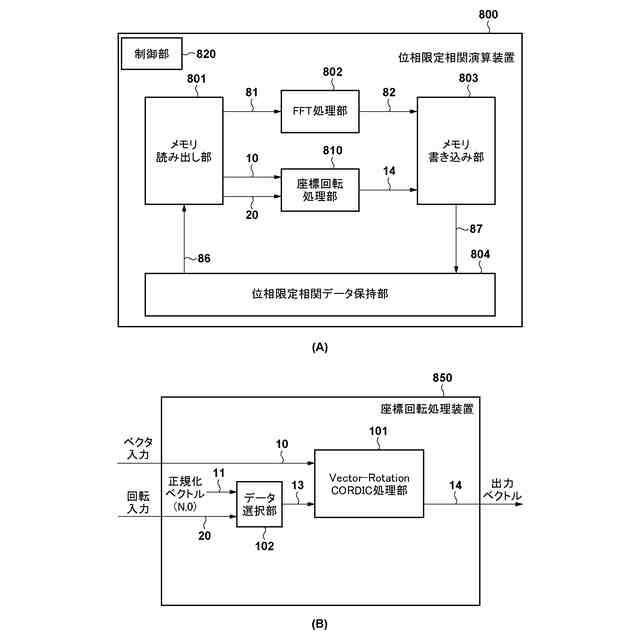
(A)、(B)は、第1実施形態の座標回転処理装置の構成例を説明する図。
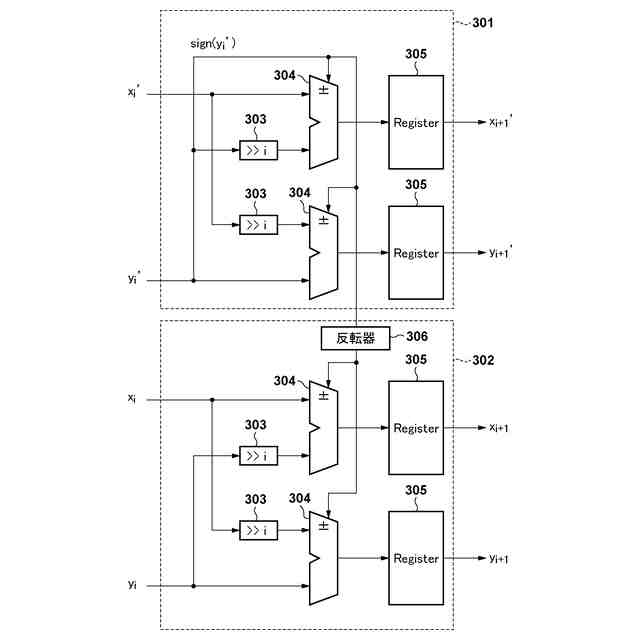
Vector-RotationCORDIC処理部の構成例を示すブロック図。
CORDIC処理部を構成する座標回転演算ユニットの構成例を示すブロック図。
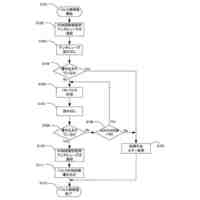
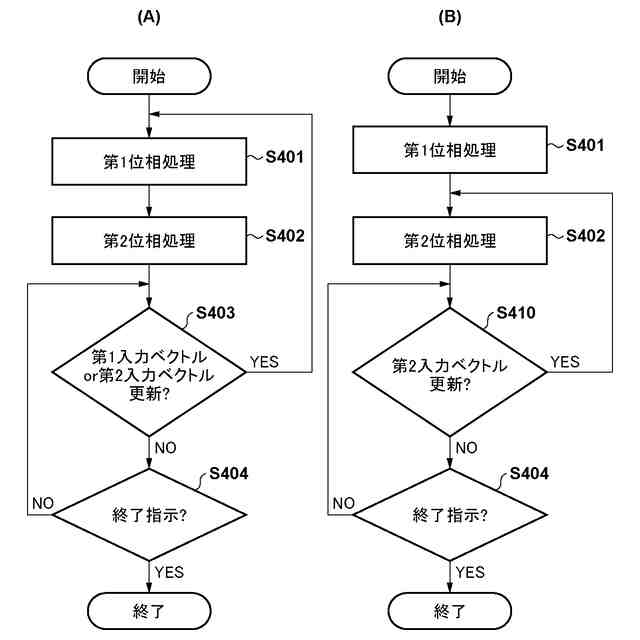
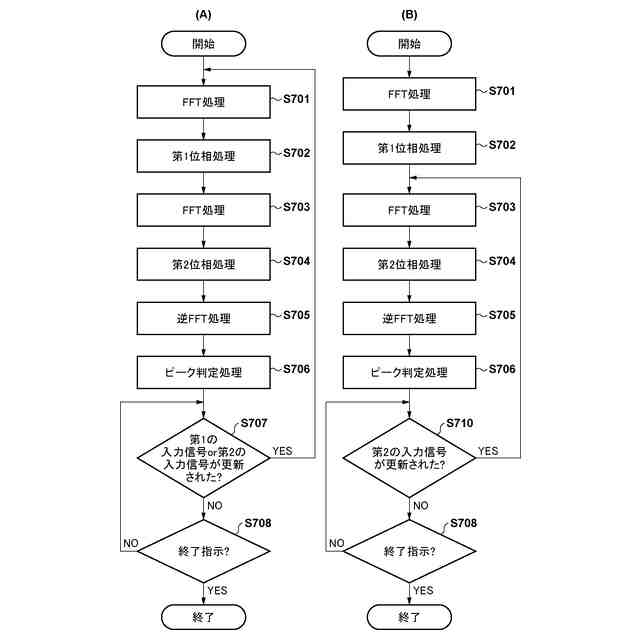
(A)は第1実施形態の座標回転処理を示すフローチャート、(B)は第2実施形態の座標回転処理を示すフローチャート。
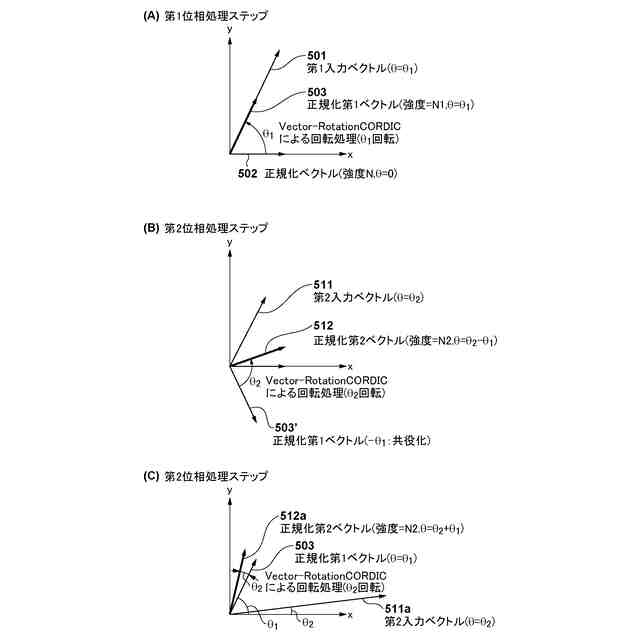
(A)は第1位相処理のベクトル処理を示す図、(B)及び(C)は第2位相処理のベクトル処理を示す図。
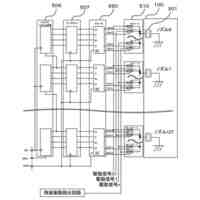
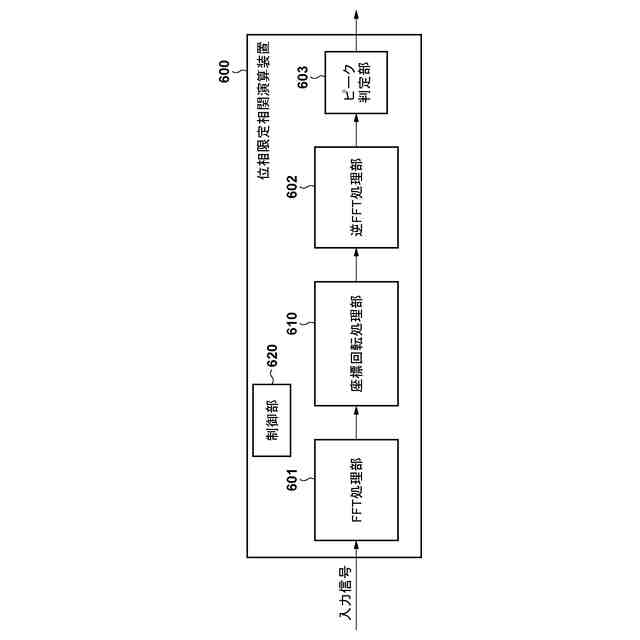
第3実施形態の位相限定相関演算装置の構成例を示すブロック図。
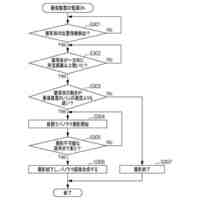
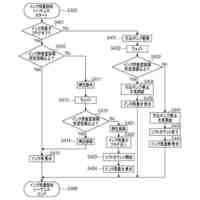
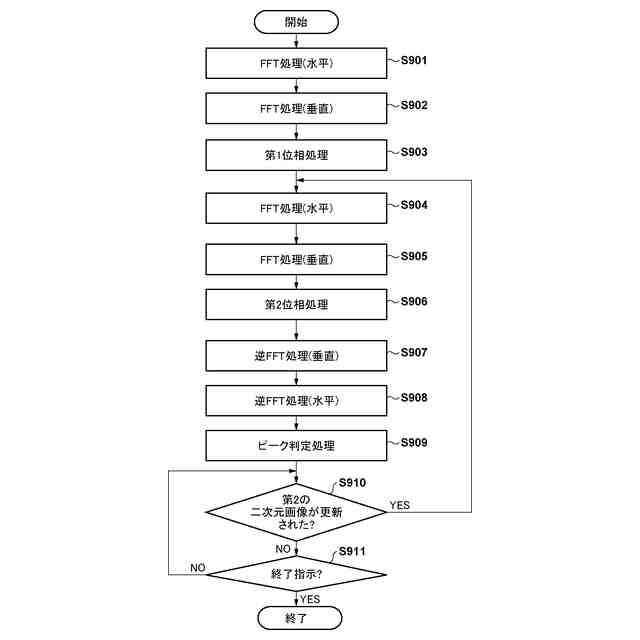
(A)、(B)は第3実施形態の位相限定相関演算処理を示すフローチャート。
(A)は第4実施形態の位相限定相関演算装置の構成例を示すブロック図、(B)は第4実施形態の座標回転処理部の構成例を示すブロック図。
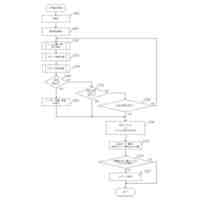
第4実施形態の位相限定相関演算処理を示すフローチャート。
第5実施形態の位相限定相関演算装置の構成例を示すブロック図。
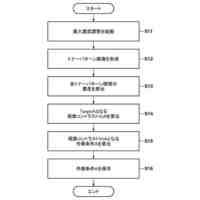
第5実施形態の位相限定相関演算処理を示すフローチャート。
(A)、(B)は、第5実施形態の位相限定相関演算処理の他の例を示すフローチャート。
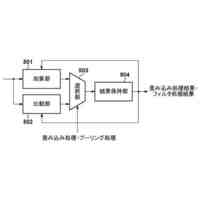
第6実施形態の座標回転処理装置の構成例を示すブロック図。
(A)は第6実施形態のベクトルデータ圧縮処理を説明する図、(B)と(C)は第7実施形態のベクトルデータ圧縮処理を説明する図。
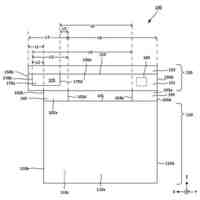
第8実施形態の座標回転処理装置の構成例を示すブロック図。
第8実施形態における固定小数化データ処理を説明する図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
顕微鏡
3日前
キヤノン株式会社
移動体
2日前
キヤノン株式会社
記録装置
19日前
キヤノン株式会社
通信装置
19日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
光学装置
9日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
記憶装置
2日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
清掃装置
1か月前
キヤノン株式会社
撮像装置
18日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
処理装置
2日前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
通信装置
1か月前
キヤノン株式会社
光学センサ
8日前
キヤノン株式会社
光走査装置
24日前
キヤノン株式会社
光走査装置
11日前
キヤノン株式会社
液体供給装置
12日前
キヤノン株式会社
画像処理装置
12日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像処理装置
1か月前
キヤノン株式会社
液体吐出装置
1か月前
キヤノン株式会社
画像表示装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ