TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085475
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199376
出願日
2023-11-24
発明の名称
モータ制御方法及びモータ制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
H02P
5/74 20060101AFI20250529BHJP(電力の発電,変換,配電)
要約
【課題】全ての車輪が駆動輪となり得る電動車両においても、スリップ制御を適切に実行する。
【解決手段】第1トルク指令値T
mf_f
*
及び第2トルク指令値T
mr_f
*
に基づいて第1駆動モータ21及び前記第2駆動モータ31のそれぞれの動作を制御するモータ制御方法を提供する。このモータ制御方法は、第1回転速度ω
mf
及び第1基本トルク指令値T
mf
*
に基づき、スリップ回転数制御を実行して第1トルク指令値T
mf_f
*
を算出する第1トルク指令値算出工程と、第2基本トルク指令値T
mr
*
に基づいて第2トルク指令値T
mr_f
*
を算出する第2トルク指令値算出工程と、を含む。特に第2トルク指令値算出工程では、電動車両10に作用する外乱の推定値である外乱推定値T^
dist
及び第1トルク指令値T
mf_f
*
によって第2基本トルク指令値T
mr
*
を制限することで、第2トルク指令値T
mr_f
*
を算出する。
【選択図】図6
特許請求の範囲
【請求項1】
複数の駆動モータにより複数の駆動輪を独立して駆動する電動車両において、第1駆動輪を駆動する第1駆動モータに対する第1トルク指令値及び第2駆動輪を駆動する第2駆動モータに対する第2トルク指令値を定め、前記第1トルク指令値及び前記第2トルク指令値に基づいて前記第1駆動モータ及び前記第2駆動モータのそれぞれの動作を制御するモータ制御方法であって、
前記第1駆動モータの回転速度である第1回転速度、及び前記第2駆動モータの回転速度である第2回転速度を取得する回転速度取得工程と、
前記第1駆動モータの基本トルク指令値である第1基本トルク指令値、及び前記第2駆動モータの基本トルク指令値である第2基本トルク指令値を算出する基本トルク算出工程と、
前記第1回転速度及び前記第1基本トルク指令値に基づき、スリップ回転数制御を実行して前記第1トルク指令値を算出する第1トルク指令値算出工程と、
前記第2基本トルク指令値に基づいて、前記第2トルク指令値を算出する第2トルク指令値算出工程と、を含み、
前記第2トルク指令値算出工程では、
前記電動車両に作用する外乱の推定値である外乱推定値及び前記第1トルク指令値によって前記第2基本トルク指令値を制限することで、前記第2トルク指令値を算出する、
モータ制御方法。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載のモータ制御方法であって、
前記第2トルク指令値算出工程では、
前記外乱推定値から勾配抵抗成分が除去された値に相当する補正外乱推定値を算出し、
前記補正外乱推定値及び前記第1トルク指令値によって前記第2基本トルク指令値を制限することで、前記第2トルク指令値を算出する、
モータ制御方法。
【請求項3】
請求項2に記載のモータ制御方法であって、
前記第2トルク指令値算出工程では、
前記第2回転速度、前記第1トルク指令値、及び前記第2トルク指令値のフィードバック値に基づいて前記外乱推定値を算出し、
前記電動車両の駆動時に、前記補正外乱推定値を前記外乱推定値以下の値に定め、
前記電動車両の回生時に、前記補正外乱推定値を前記外乱推定値以上の値に定める、
モータ制御方法。
【請求項4】
請求項3に記載のモータ制御方法であって、
前記第2トルク指令値算出工程では、
前記電動車両の駆動時に、前記外乱推定値が0以上ならば前記補正外乱推定値を0に定め、前記外乱推定値が0未満ならば前記外乱推定値をそのまま前記補正外乱推定値とし、
前記電動車両の回生時に、前記外乱推定値が0以上ならば前記外乱推定値をそのまま前記補正外乱推定値とし、前記外乱推定値が0未満ならば前記補正外乱推定値を0に定める、
モータ制御方法。
【請求項5】
請求項2に記載のモータ制御方法であって、
前記第2トルク指令値算出工程では、
前記電動車両に作用する勾配抵抗を取得し、
前記第2回転速度、前記第1トルク指令値、前記第2トルク指令値のフィードバック値、及び前記勾配抵抗に基づいて、前記補正外乱推定値を算出する、
モータ制御方法。
【請求項6】
請求項1に記載のモータ制御方法であって、
前記第2トルク指令値算出工程では、
前記第2回転速度、前記第1トルク指令値、及び前記第2トルク指令値のフィードバック値に基づいて前記外乱推定値を算出し、
前記外乱推定値及び前記第1トルク指令値に基づいてトルク制限値を算出し、
前記第1トルク指令値、前記第2基本トルク指令値、及び前記トルク制限値の内の最も小さい値を前記第2トルク指令値として算出する、
モータ制御方法。
【請求項7】
複数の駆動モータにより複数の駆動輪を独立して駆動する電動車両において、第1駆動輪を駆動する第1駆動モータに対する第1トルク指令値及び第2駆動輪を駆動する第2駆動モータに対する第2トルク指令値を定め、前記第1トルク指令値及び前記第2トルク指令値に基づいて前記第1駆動モータ及び前記第2駆動モータのそれぞれの動作を制御するモータ制御装置であって、
前記第1駆動モータの回転速度である第1回転速度、及び前記第2駆動モータの回転速度である第2回転速度を取得する回転速度取得部と、
前記第1駆動モータの基本トルク指令値である第1基本トルク指令値、及び前記第2駆動モータの基本トルク指令値である第2基本トルク指令値を算出する基本トルク算出部と、
前記第1回転速度及び前記第1基本トルク指令値に基づき、スリップ回転数制御を実行して前記第1トルク指令値を算出する第1トルク指令値算出部と、
前記第2基本トルク指令値に基づいて、前記第2トルク指令値を算出する第2トルク指令値算出部と、を有し、
前記第2トルク指令値算出部は、
前記電動車両に作用する外乱の推定値である外乱推定値及び前記第1トルク指令値によって前記第2基本トルク指令値を制限することで、前記第2トルク指令値を算出する、
モータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御方法及びモータ制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、電動の駆動モータによって車輪(駆動輪)を駆動する電動車両において、スリップ状態を抑制する技術が知られている。例えば、特許文献1では、駆動モータの回転速度及び駆動モータによって駆動されない従動輪の速度(車速推定値相当)を用いて駆動輪のスリップ状態を検出し、駆動輪のスリップが検出されたときにスリップ制御用指令トルクを算出して駆動モータの出力を制限し、スリップを抑制するスリップ制御が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-158337号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1では、スリップしていない従動輪の回転数を用いて駆動輪のスリップ状態を検出してスリップ制御を行う。しかしながら、全ての車輪が駆動輪となるタイプの電動車両(いわゆる4WDの電動車両)の場合においては、全ての駆動輪がスリップする状態となることが想定される。この場合には、車速に適切に相関した車輪速を取得することができず、スリップ状態を適切に検出することが困難となる。
【0005】
したがって、本発明の目的は、全ての車輪が駆動輪となり得る電動車両においても、スリップ制御を適切に実行し得るモータ制御方法及びモータ制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、複数の駆動モータにより複数の駆動輪を独立して駆動する電動車両において、第1駆動輪を駆動する第1駆動モータに対する第1トルク指令値及び第2駆動輪を駆動する第2駆動モータに対する第2トルク指令値を定め、第1トルク指令値及び第2トルク指令値に基づいて第1駆動モータ及び第2駆動モータのそれぞれの動作を制御するモータ制御方法が提供される。
【0007】
このモータ制御方法は、第1駆動モータの回転速度である第1回転速度、及び第2駆動モータの回転速度である第2回転速度を取得する回転速度取得工程と、第1駆動モータの基本トルク指令値である第1基本トルク指令値、及び第2駆動モータの基本トルク指令値である第2基本トルク指令値を算出する基本トルク算出工程と、第1回転速度及び第1基本トルク指令値に基づき、スリップ回転数制御を実行して第1トルク指令値を算出する第1トルク指令値算出工程と、第2基本トルク指令値に基づいて、第2トルク指令値を算出する第2トルク指令値算出工程と、を含む。
【0008】
特に、第2トルク指令値算出工程では、電動車両に作用する外乱の推定値である外乱推定値及び第1トルク指令値によって第2基本トルク指令値を制限することで、第2トルク指令値を算出する。
【発明の効果】
【0009】
本発明によれば、全ての車輪が駆動輪となり得る電動車両においても、スリップ制御を適切に実行することができる。
【図面の簡単な説明】
【0010】
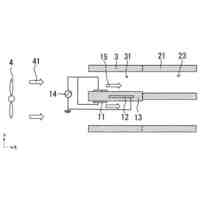
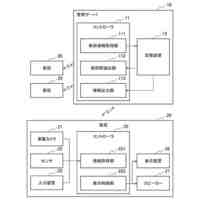
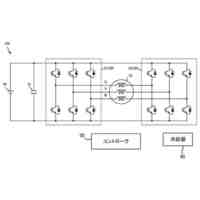
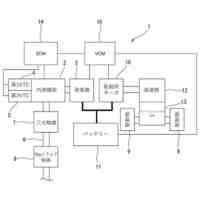
図1は、電動車両のシステム構成の一例を示す概略構成図である。
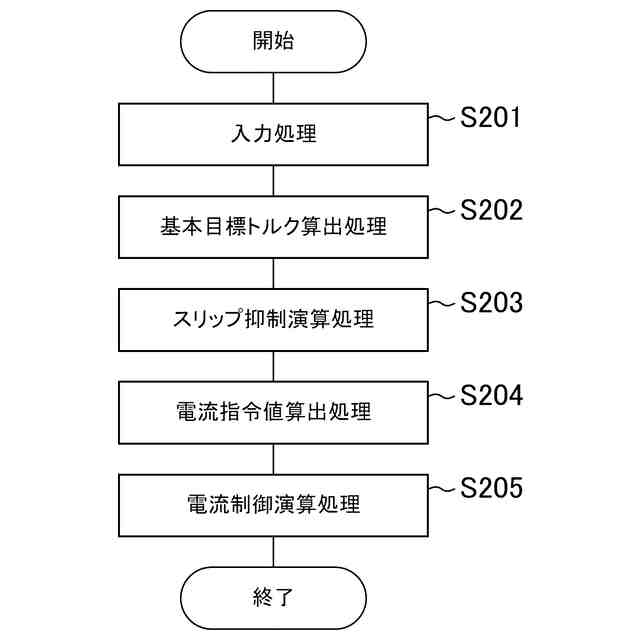
図2は、モータ制御全体の流れを示すフローチャートである。
図3は、アクセル開度-トルクテーブルの一例を示す図である。
図4は、トルク配分演算部の詳細を示すブロック図である。
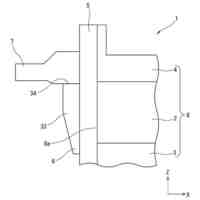
図5は、電動車両の運動方程式で用いるパラメータを示す説明図である。
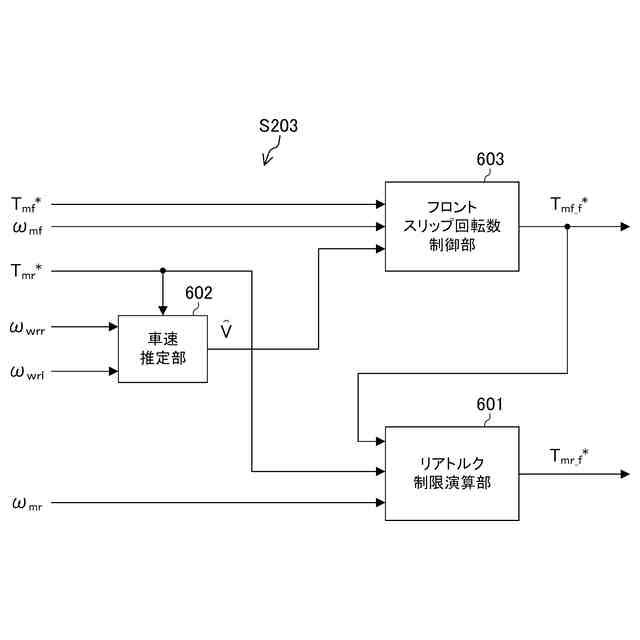
図6は、スリップ抑制演算処理の詳細を示すブロック図である。
図7は、リアトルク制限演算部の詳細を示すブロック図である。
図8は、第1実施形態による外乱推定演算部の詳細を示すブロック図である。
図9は、第1実施形態による外乱トルク制限部における処理を示すフローチャートである。
図10は、制限トルク算出部の詳細を示すブロック図である。
図11は、第1実施形態によるトルク制限部における処理を示すフローチャートである。
図12は、車速推定部における処理を示すフローチャートである。
図13は、第2実施形態による外乱推定演算部の詳細を示すブロック図である。
図14は、第3実施形態によるリアトルク制限演算部の詳細を示すブロック図である。
図15は、第3実施形態による外乱推定演算部の詳細を示すブロック図である。
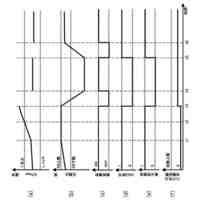
図16は、比較例による制御結果を示すタイムチャートである。
図17は、実施例による制御結果を示すタイムチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
蓄電池
3日前
日産自動車株式会社
発電機
1か月前
日産自動車株式会社
冷却装置
10日前
日産自動車株式会社
内燃機関
27日前
日産自動車株式会社
内燃機関
27日前
日産自動車株式会社
二次電池
16日前
日産自動車株式会社
駆動装置
13日前
日産自動車株式会社
内燃機関
12日前
日産自動車株式会社
診断装置
12日前
日産自動車株式会社
冷却装置
12日前
日産自動車株式会社
車両構造
20日前
日産自動車株式会社
全固体電池
10日前
日産自動車株式会社
熱交換装置
13日前
日産自動車株式会社
車両用シート
23日前
日産自動車株式会社
電池モジュール
16日前
日産自動車株式会社
電池モジュール
6日前
日産自動車株式会社
燃料電池スタック
27日前
日産自動車株式会社
パレット搬送装置
24日前
日産自動車株式会社
パレット搬送装置
24日前
日産自動車株式会社
発電膜及び発電方法
6日前
日産自動車株式会社
全固体電池の製造方法
23日前
日産自動車株式会社
ウォッシャタンク構造
17日前
日産自動車株式会社
蓄熱材及び排気ガス浄化触媒
1か月前
日産自動車株式会社
車両制御方法及び車両制御装置
4日前
日産自動車株式会社
情報表示方法及び情報表示装置
25日前
日産自動車株式会社
情報処理方法及び情報処理装置
24日前
日産自動車株式会社
配車管理装置及び配車管理方法
5日前
日産自動車株式会社
情報処理装置及び情報処理方法
23日前
日産自動車株式会社
調湿装置及び車載用空調システム
25日前
日産自動車株式会社
電池制御システム及び電池制御方法
26日前
日産自動車株式会社
情報提供方法及び情報提供システム
23日前
日産自動車株式会社
モータ制御方法及びモータ制御装置
10日前
日産自動車株式会社
モータ制御方法及びモータシステム
23日前
日産自動車株式会社
内燃機関の制御方法および制御装置
18日前
日産自動車株式会社
車両の制御方法及び車両の制御装置
3日前
日産自動車株式会社
内燃機関の制御方法および制御装置
18日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ