TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080597
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193854
出願日
2023-11-14
発明の名称
歩行型作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
33/08 20060101AFI20250519BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業を行っているときに、作業装置の駆動負荷が急激に減少した場合に、煩わしさなく操作の安定性を確保することが可能な歩行型作業機が要望されていた。
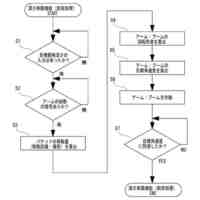
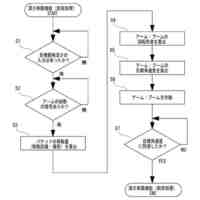
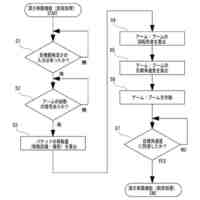
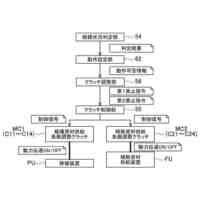
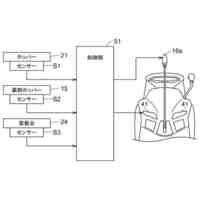
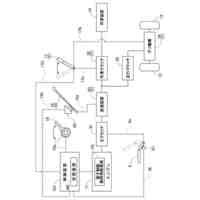
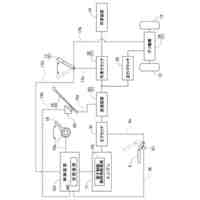
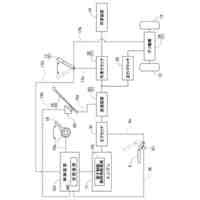
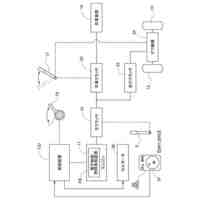
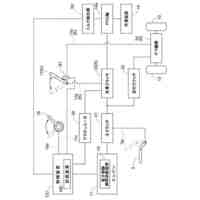
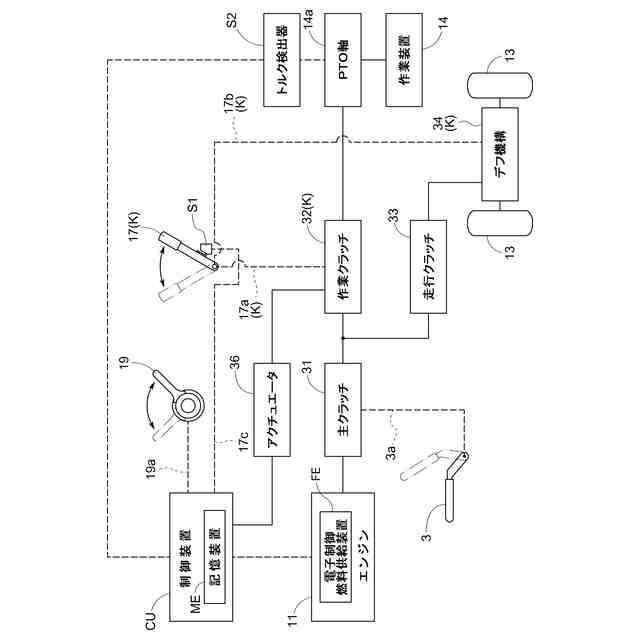
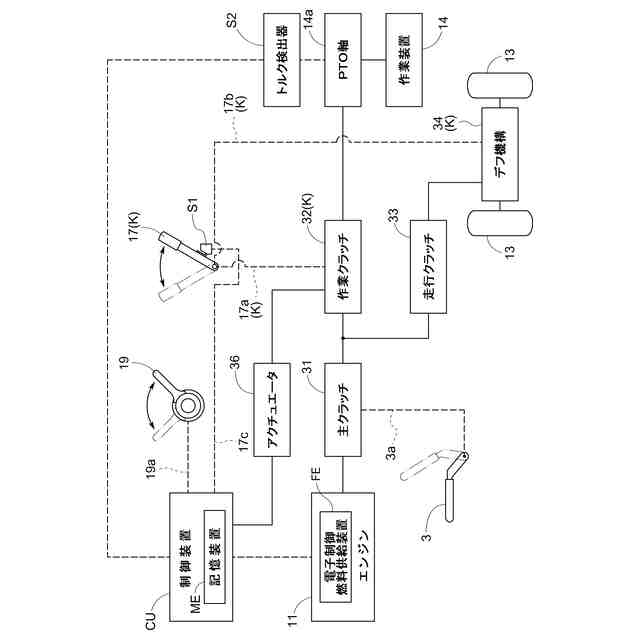
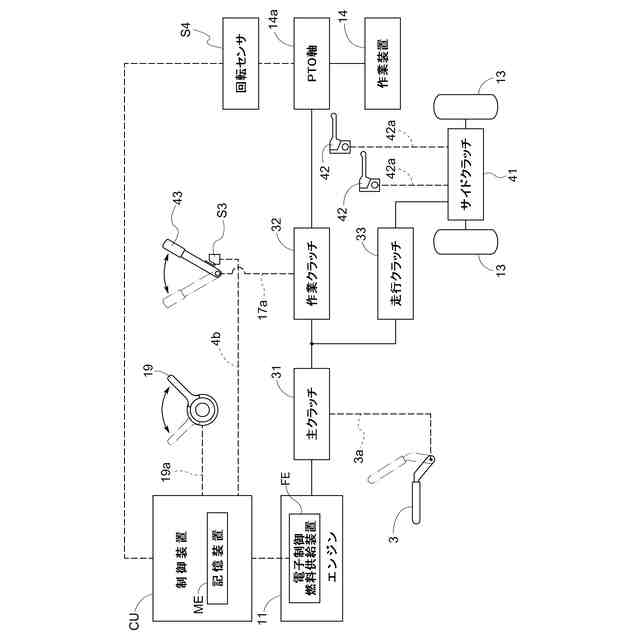
【解決手段】作業装置14と、作業装置14を駆動する駆動源11と、作業装置14が作業を行っている作業状態であるか否かを検出する作業状態検出手段S1と、作業装置14の負荷の大きさを検出する負荷検出手段S2と、作業装置14の駆動状態を制御する制御装置CUと、が備えられ、制御装置CUは、作業状態検出手段S1にて作業状態が検出されている状態において、負荷検出手段S2にて検出される負荷が設定量以下になると、作業装置14の駆動速度を減速する、あるいは、駆動停止させる。
【選択図】図3
特許請求の範囲
【請求項1】
作業装置と、
前記作業装置を駆動する駆動源と、
前記作業装置が作業を行っている作業状態であるか否かを検出する作業状態検出手段と、
前記作業装置の負荷の大きさを検出する負荷検出手段と、
前記作業装置の駆動状態を制御する制御装置と、が備えられ、
前記制御装置は、前記作業状態検出手段にて作業状態が検出されている状態において、前記負荷検出手段にて検出される負荷が設定量以下になると、前記作業装置の駆動速度を減速する、あるいは、駆動停止させる歩行型作業機。
続きを表示(約 780 文字)
【請求項2】
前記駆動源から前記作業装置への動力伝達を入り切りするクラッチが備えられ、
前記制御装置は、前記負荷が設定量以下になると、前記クラッチを切り操作する請求項1に記載の歩行型作業機。
【請求項3】
前記駆動源は、電子制御燃料供給装置を備えるエンジンであり、
前記制御装置は、前記負荷が設定量以下になると、前記エンジンの駆動速度を減速する、あるいは、前記エンジンを駆動停止させる請求項1に記載の歩行型作業機。
【請求項4】
旋回用作動状態と直進用作動状態とに切り換え可能な切換機構が備えられ、
前記作業状態検出手段は、前記切換機構が前記直進用作動状態にあるか否かによって前記作業状態を検出する請求項1から3のいずれか一項に記載の歩行型作業機。
【請求項5】
前記駆動源から前記作業装置への動力伝達を入り切り可能なクラッチが備えられ、
前記作業状態検出手段は、前記クラッチが入り状態であるか否かによって前記作業状態を検出する請求項1から3のいずれか一項に記載の歩行型作業機。
【請求項6】
前記作業状態検出手段は、前記駆動源からの動力を前記作業装置に伝達するPTO軸が回転しているか否かによって前記作業状態を検出する請求項1から3のいずれか一項に記載の歩行型作業機。
【請求項7】
前記負荷検出手段は、前記駆動源からの動力を前記作業装置に伝達するPTO軸の駆動トルクに基づいて負荷を検知する請求項1から3のいずれか一項に記載の歩行型作業機。
【請求項8】
前記負荷検出手段は、前記駆動源からの動力を前記作業装置に伝達するPTO軸の回転速度の変動に基づいて負荷を検知する請求項1から3のいずれか一項に記載の歩行型作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、歩行型管理機あるいは歩行型田植機等の歩行型作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
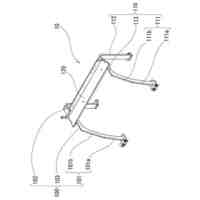
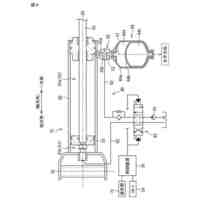
歩行型作業機の一例としての歩行型管理機では、駆動源としてエンジンが搭載され、エンジンから伝動下手側への動力伝達を入り切り可能なクラッチが設けられ、操縦ハンドルの近くに、クラッチを入切操作するためのクラッチレバー、エンジン回転を調整するスロットルレバー等、が設けられる。(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-170654号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
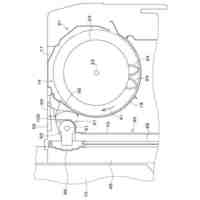
圃場にて歩行型管理機により農作業が行われる際、オペレータは、操縦ハンドルを持って操縦すると共に、走行する歩行型作業機と共に歩行しながら耕耘作業を行う。作業を行っているときに、作業装置が圃場面から浮き上がったり、作業装置が石等の硬い物に乗り上げて空回り状態になることがある。このような場合には、作業装置の駆動負荷が急激に減少するので、駆動速度が急上昇することがある。
【0005】
作業を行っているときには、エンジンの出力は最大出力に近い大きな値に調整されているので、上述したように駆動負荷が急激に減少すると、作業装置の速度が急上昇して高速で回転し続けて、オペレータによる運転操作が不安定になるおそれがある。オペレータが、スロットルレバーを操作してエンジンの出力を低減させることで、作業装置の速度を低減できるが操作が煩雑となる。
【0006】
そこで、作業を行っているときに、作業装置の駆動負荷が急激に減少した場合に、煩わしさなく操作の安定性を確保することが可能な歩行型作業機が要望されていた。
【課題を解決するための手段】
【0007】
本発明に係る歩行型作業機の特徴構成は、作業装置と、前記作業装置を駆動する駆動源と、前記作業装置が作業を行っている作業状態であるか否かを検出する作業状態検出手段と、前記作業装置の負荷の大きさを検出する負荷検出手段と、前記作業装置の駆動状態を制御する制御装置と、が備えられ、前記制御装置は、前記作業状態検出手段にて作業状態が検出されている状態において、前記負荷検出手段にて検出される負荷が設定量以下になると、前記作業装置の駆動速度を減速する、あるいは、駆動停止させる点にある。
【0008】
本発明によれば、作業装置が作業を行っている作業状態において、作業装置の負荷が設定量以下にまで減少すると、自動的に、作業装置の駆動速度が減速するか、あるいは、作業装置の駆動が停止される。その結果、例えば、作業装置が圃場面から浮き上がったり、硬い物の接当して空回りするような状況になれば、作業装置が高速で回転し続けることがなく、オペレータによる運転操作が不安定になることを回避できる。
【0009】
従って、作業を行っているときに、作業装置の駆動負荷が急激に減少した場合に、煩わしさなく操作の安定性を確保することが可能な歩行型作業機が提供できるに至った。
【0010】
本発明においては、前記駆動源から前記作業装置への動力伝達を入り切りするクラッチが備えられ、前記制御装置は、前記負荷が設定量以下になると、前記クラッチを切り操作すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
24日前
株式会社クボタ
作業機
24日前
株式会社クボタ
作業機
24日前
株式会社クボタ
作業機
24日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
作業機
9日前
株式会社クボタ
田植機
16日前
株式会社クボタ
田植機
26日前
株式会社クボタ
作業車
16日前
株式会社クボタ
コンバイン
22日前
株式会社クボタ
作物収穫機
19日前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
圃場作業車
11日前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
多目的車両
4日前
株式会社クボタ
乗用型田植機
11日前
株式会社クボタ
歩行型作業機
25日前
株式会社クボタ
歩行型作業機
25日前
株式会社クボタ
歩行型作業機
25日前
株式会社クボタ
電動作業車両
18日前
株式会社クボタ
電動作業車両
4日前
株式会社クボタ
歩行型作業機
26日前
株式会社クボタ
電動作業車両
24日前
株式会社クボタ
電動作業車両
11日前
株式会社クボタ
歩行型作業機
26日前
株式会社クボタ
歩行型作業機
26日前
株式会社クボタ
歩行型作業機
11日前
株式会社クボタ
嫌気性処理方法
2日前
株式会社クボタ
排気ガス再循環装置
22日前
株式会社クボタ
自動走行制御システム
16日前
株式会社クボタ
自動走行制御システム
16日前
株式会社クボタ
燃料噴射装置およびエンジン
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ