TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081127
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194682
出願日
2023-11-15
発明の名称
歩行型作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
F02D
29/00 20060101AFI20250520BHJP(燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備)
要約
【課題】操作の煩わしさがない状態で、エネルギー消費の抑制と騒音の低減が可能な歩行型作業機が要望されていた。
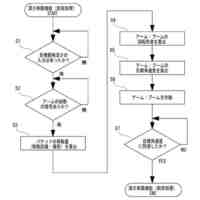
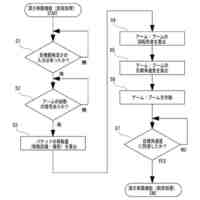
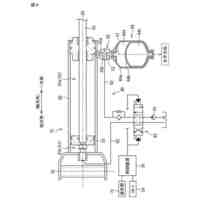
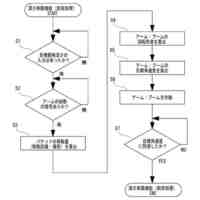
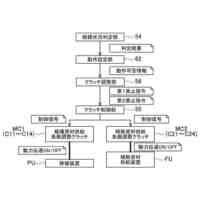
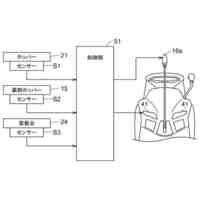
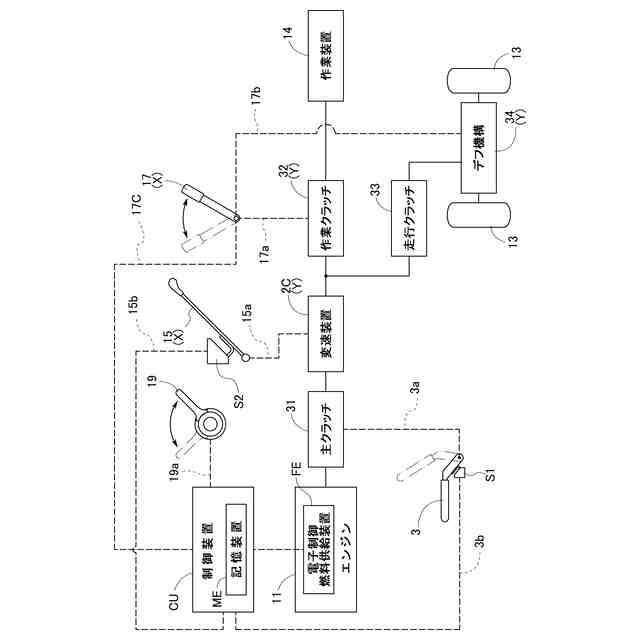
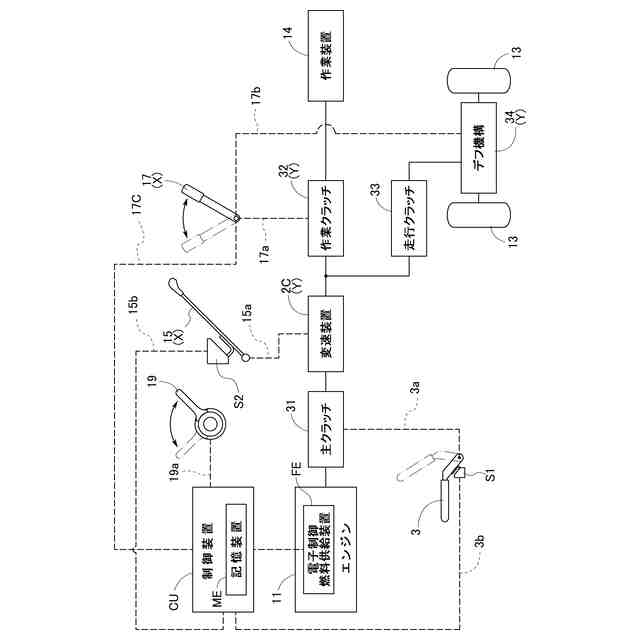
【解決手段】出力回転を変更可能な駆動源11と、駆動源11から伝動下手側への動力伝達を入り切り可能な主クラッチ31と、人為操作により駆動源11の目標速度を設定可能な速度設定手段19と、主クラッチ31が入り状態であるか切り状態であるかを検知するクラッチ検知手段S1と、駆動源の作動を制御する制御装置CUと、が備えられ、制御装置CUは、クラッチ検知手段S1の検出結果に基づいて、入り状態が検出されると、目標速度になるように駆動源11の作動を制御し、切り状態が検出されると、目標速度よりも低速の設定速度になるように駆動源11の作動を制御する。
【選択図】図3
特許請求の範囲
【請求項1】
出力回転を変更可能な駆動源と、
前記駆動源から伝動下手側への動力伝達を入り切り可能な主クラッチと、
人為操作により前記駆動源の目標速度を設定可能な速度設定手段と、
前記主クラッチが入り状態であるか切り状態であるかを検知するクラッチ検知手段と、
前記駆動源の作動を制御する制御装置と、が備えられ、
前記制御装置は、
前記クラッチ検知手段の検出結果に基づいて、前記入り状態が検出されると、前記目標速度になるように前記駆動源の作動を制御し、前記切り状態が検出されると、前記目標速度よりも低速の設定速度になるように前記駆動源の作動を制御する歩行型作業機。
続きを表示(約 370 文字)
【請求項2】
前記主クラッチを入り切り操作可能な人為操作式の操作具が備えられ、
前記クラッチ検知手段は、前記操作具がクラッチ入り位置あるいはクラッチ切り位置に操作されたことを検出する検知スイッチである請求項1に記載の歩行型作業機。
【請求項3】
前記駆動源は、電子制御燃料供給装置を備えるエンジンである請求項1又は2に記載の歩行型作業機。
【請求項4】
前記エンジンの始動を指令する始動指令手段が備えられ、
前記制御装置は、前記始動指令手段にて前記エンジンの始動が指令されたとき、前記クラッチ検知手段にて前記切り状態が検出されると、前記エンジンの始動を許容し、前記クラッチ検知手段にて前記切り状態が検出されると、前記エンジンの始動を牽制するように構成されている請求項3に記載の歩行型作業機。
発明の詳細な説明
【技術分野】
【0001】
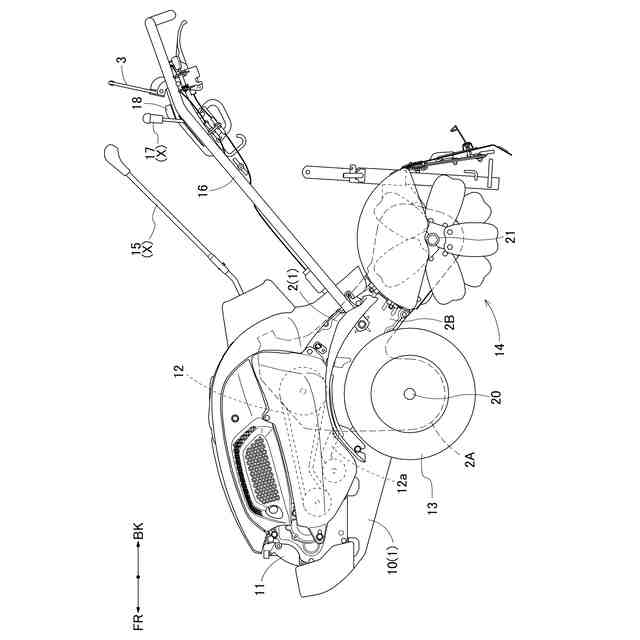
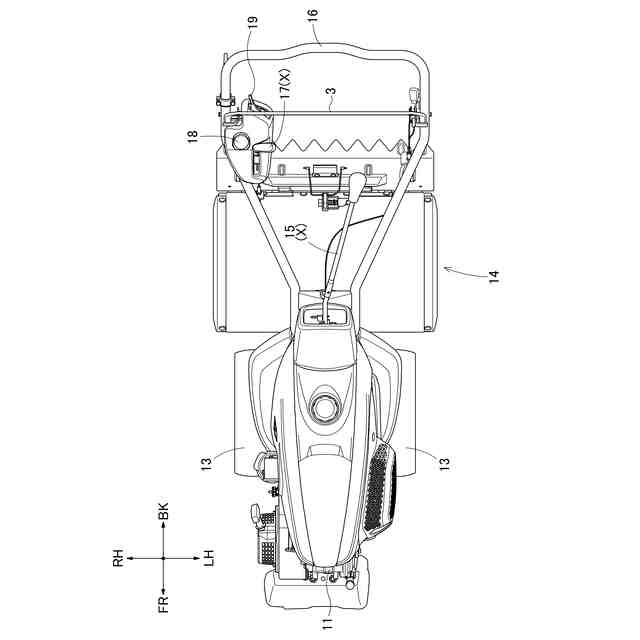
本発明は、例えば、歩行型管理機あるいは歩行型田植機等の歩行型作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
歩行型作業機は、駆動源としてエンジンが搭載され、エンジンから伝動下手側への動力伝達を入り切り可能な主クラッチが設けられ、操縦ハンドルの近くに、主クラッチを入切操作するための主クラッチレバー、エンジン回転を調整するスロットルレバー等、が設けられる。そして、主クラッチを入切操作にかかわらず、エンジンの出力回転はスロットルレバーにて設定される目標速度になるように調整される構成となっていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-170654号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
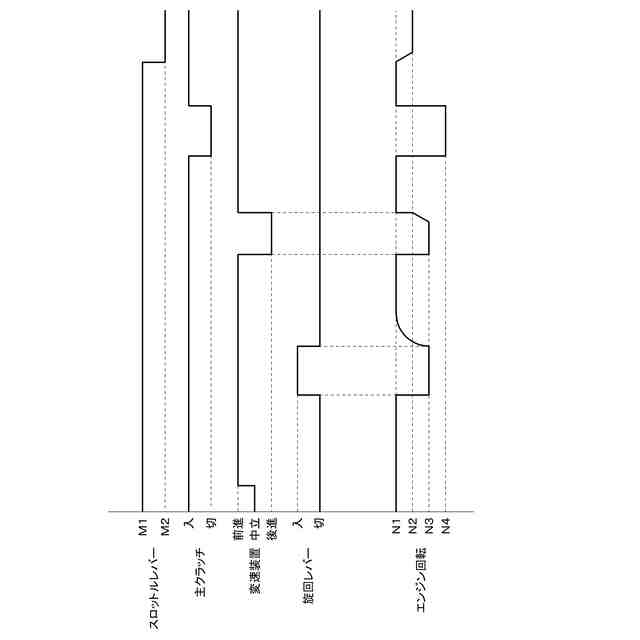
上記従来構成では、スロットルレバーの設定値としては、作業走行を実行するときは、駆動負荷が大きいので、エンジンの出力回転は最大出力に近い高い出力回転が設定されるのが一般的である。作業を中断しているときは、主クラッチを切り操作しているが、このような主クラッチの切り状態であっても、エンジンの出力回転は上述した高い出力回転が維持されることになる。この中断状態が長く続くと、エンジンの燃料(エネルギー)が無駄に消費されると共に、大きな駆動音が騒音となる不利がある。
【0005】
そこで、オペレータは、中断が長くなるときは、スロットルレバーを操作してエンジンの出力回転を低減させることになる。しかし、中断した後に作業を再開するような場合には、スロットルレバーを元の状態に復帰させる操作が必要となる。そして、特に、このような中断が繰り返し行われる場合には、スロットルレバーを低減させる操作と、元に復帰させる操作とを、繰り返し行わなければならず、操作の煩わしさがある。
【0006】
そこで、操作の煩わしさがない状態で、エネルギー消費の抑制と騒音の低減が可能な歩行型作業機が要望されていた。
【課題を解決するための手段】
【0007】
本発明に係る歩行型作業機の特徴構成は、出力回転を変更可能な駆動源と、前記駆動源から伝動下手側への動力伝達を入り切り可能な主クラッチと、人為操作により前記駆動源の目標速度を設定可能な速度設定手段と、前記主クラッチが入り状態であるか切り状態であるかを検知するクラッチ検知手段と、前記駆動源の作動を制御する制御装置と、が備えられ、前記制御装置は、前記クラッチ検知手段の検出結果に基づいて、前記入り状態が検出されると、前記目標速度になるように前記駆動源の作動を制御し、前記切り状態が検出されると、前記目標速度よりも低速の設定速度になるように前記駆動源の作動を制御する点にある。
【0008】
本発明によれば、クラッチ検知手段の検出結果に基づいて、主クラッチが入り状態であれば目標速度で駆動され、主クラッチが切り状態であれば低速の設定速度で駆動されるように、駆動源の作動が制御される。
【0009】
その結果、主クラッチの入り切り操作を行うだけで、作業状態においては、高速駆動により能率よく作業が行われ、作業を中断しているときには、駆動音が小さくかつエネルギー消費を少なくかつ駆動音を小さくすることができる。
【0010】
従って、操作の煩わしさがない状態で、エネルギー消費の抑制と騒音の低減が可能な歩行型作業機を提供できるに至った。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
25日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
25日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
田植機
27日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
田植機
17日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
25日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
10日前
株式会社クボタ
作業機
25日前
株式会社クボタ
作業車
17日前
株式会社クボタケミックス
管継手
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
コンバイン
23日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
作物収穫機
20日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
圃場作業車
12日前
株式会社クボタ
多目的車両
5日前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ