TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041415
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148707
出願日
2023-09-13
発明の名称
作業機械を制御するためのシステムおよび方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/20 20060101AFI20250318BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の自動制御において、目標経路を簡易に設定する。
【解決手段】システムは、作業機械を制御するためのシステムであって、センサとコントローラとを備える。センサは、作業機械の位置を検出する。コントローラは、複数の面で構成された目標地形を示す目標地形データを取得する。コントローラは、複数の面から、作業の対象となる複数の作業面を選択する。コントローラは、複数の作業面をグループ化して目標面として決定する。コントローラは、目標面の辺に沿うように目標経路を決定する。コントローラは、作業機械の位置を取得する。コントローラは、作業機械の位置に基づいて、作業機械が目標経路に沿って走行するように作業機械を制御する。
【選択図】図11
特許請求の範囲
【請求項1】
作業機械を制御するためのシステムであって、
前記作業機械の位置を検出するセンサと、
コントローラと、
を備え、
前記コントローラは、
複数の面で構成された目標地形を示す目標地形データを取得し、
前記複数の面から、作業の対象となる複数の作業面を選択し、
前記複数の作業面をグループ化して目標面として決定し、
前記目標面の辺に沿うように目標経路を決定し、
前記作業機械の位置を取得し、
前記作業機械の位置に基づいて、前記作業機械が前記目標経路に沿って走行するように前記作業機械を制御する、
システム。
続きを表示(約 1,100 文字)
【請求項2】
前記コントローラは、前記複数の面のなかから、互いに隣接する面の間の角度が閾値以下である面を、前記複数の作業面として選択する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、
前記複数の面のなかから少なくとも1つを、基準面として選択し、
前記基準面を起点として互いに隣接する面の間の角度が前記閾値以下である面を、順次、前記複数の作業面の少なくとも1つとして選択する、
請求項2に記載のシステム。
【請求項4】
前記基準面を選択するために操作可能な第1入力装置をさらに備え、
前記コントローラは、前記第1入力装置の操作に基づいて、前記基準面を選択する、
請求項3に記載のシステム。
【請求項5】
前記目標面は、第1の辺と、前記第1の辺の反対に位置する第2の辺とを含み、
前記コントローラは、前記第1の辺と前記第2の辺とのうち、前記基準面に近い方に沿うように前記目標経路を決定する、
請求項3に記載のシステム。
【請求項6】
前記閾値を設定するために操作可能な第2入力装置をさらに備え、
前記コントローラは、前記第2入力装置の操作に基づいて、前記閾値を設定する、
請求項2に記載のシステム。
【請求項7】
前記作業機械は、作業機を含み、
前記コントローラは、前記作業機の左端、又は、右端が前記目標経路に沿って移動するように、前記作業機械を制御する、
請求項1に記載のシステム。
【請求項8】
前記複数の面は、平場面を構成する複数の第1の面と、前記平場面に対して傾斜した法面を構成する複数の第2の面とを含む、
請求項1に記載のシステム。
【請求項9】
作業機械を制御するための方法であって、
複数の面で構成された目標地形を示す目標地形データを取得することと、
前記複数の面から、作業の対象となる複数の作業面を選択することと、
前記複数の作業面をグループ化して目標面として決定することと、
前記目標面の辺に沿うように目標経路を決定することと、
前記作業機械の位置を取得することと、
前記作業機械の位置に基づいて、前記作業機械が前記目標経路に沿って走行するように前記作業機械を制御すること、
を備える方法。
【請求項10】
前記複数の面のなかから、互いに隣接する面の間の角度が閾値以下である面を、前記複数の作業面として選択することを備える、
請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を制御するためのシステムおよび方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、作業機械を自動的に制御して、地形が目標となる形状(以下、目標地形と呼ぶ)となるように、掘削などの作業を行わせる技術が知られている。このような作業機械の自動制御では、コントローラは、作業機械が目標経路に沿って走行するように、作業機械を制御する。例えば、特許文献1では、コントローラは、第1作業機械のための第1作業パスを決定する。第1作業パスは、第1作業エリアにおいて、所定の作業方向に延びている。第1作業機械は、第1作業パスに従って走行しながら作業機によって地形を掘削するように自動制御される。
【先行技術文献】
【特許文献】
【0003】
特開2022-097268号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械の作業による目標地形は、上記のように直線的な単純な形状に限らず、湾曲した複雑な形状である場合がある。その場合、自動制御の目標経路を設定することは容易ではない。本開示の目的は、作業機械の自動制御において、目標経路を簡易に設定することにある。
【課題を解決するための手段】
【0005】
本開示の一態様に係るシステムは、作業機械を制御するためのシステムであって、センサとコントローラとを備える。センサは、作業機械の位置を検出する。コントローラは、複数の面で構成された目標地形を示す目標地形データを取得する。コントローラは、複数の面から、作業の対象となる複数の作業面を選択する。コントローラは、複数の作業面をグループ化して目標面として決定する。コントローラは、目標面の辺に沿うように目標経路を決定する。コントローラは、作業機械の位置を取得する。コントローラは、作業機械の位置に基づいて、作業機械が目標経路に沿って走行するように作業機械を制御する。
【0006】
本開示の他の態様に係る方法は、作業機械を制御するための方法であって、複数の面で構成された目標地形を示す目標地形データを取得することと、複数の面から、作業の対象となる複数の作業面を選択することと、複数の作業面をグループ化して目標面として決定することと、目標面の辺に沿うように目標経路を決定することと、作業機械の位置を取得することと、作業機械の位置に基づいて、作業機械が目標経路に沿って走行するように作業機械を制御すること、を備える。
【発明の効果】
【0007】
本開示によれば、目標地形を構成する複数の面から選択された複数の作業面が、グループ化され、目標面として決定される。そして、目標面の辺に沿うように、目標経路が決定される。それにより、目標経路を簡易に設定することができる。
【図面の簡単な説明】
【0008】
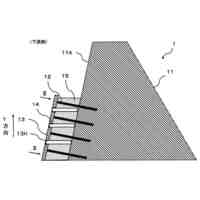
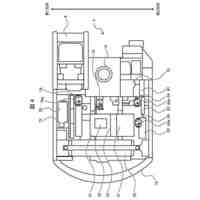
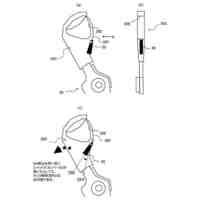
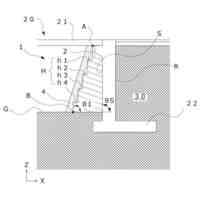
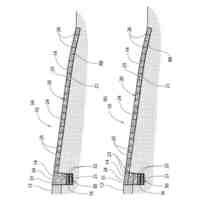
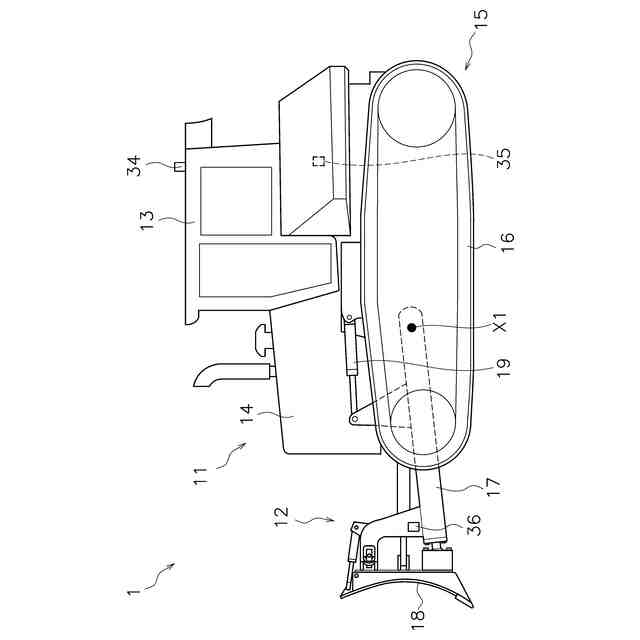
実施形態に係る作業機械を示す側面図である。
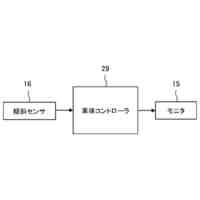
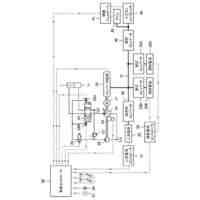
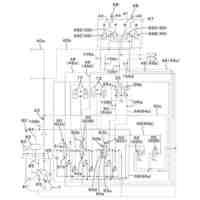
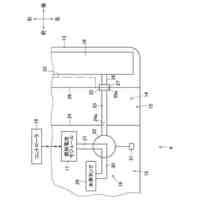
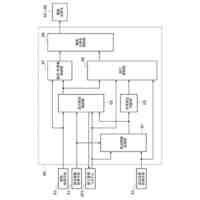
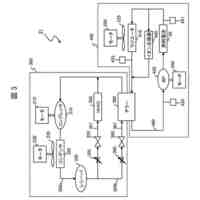
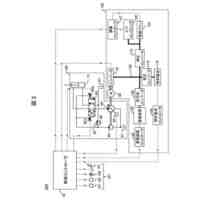
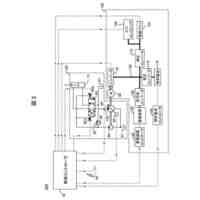
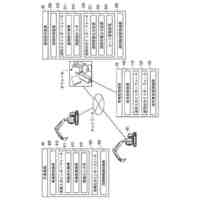
作業機械の駆動系と制御システムとの構成を示すブロック図である。
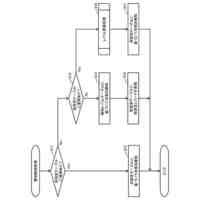
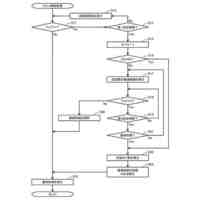
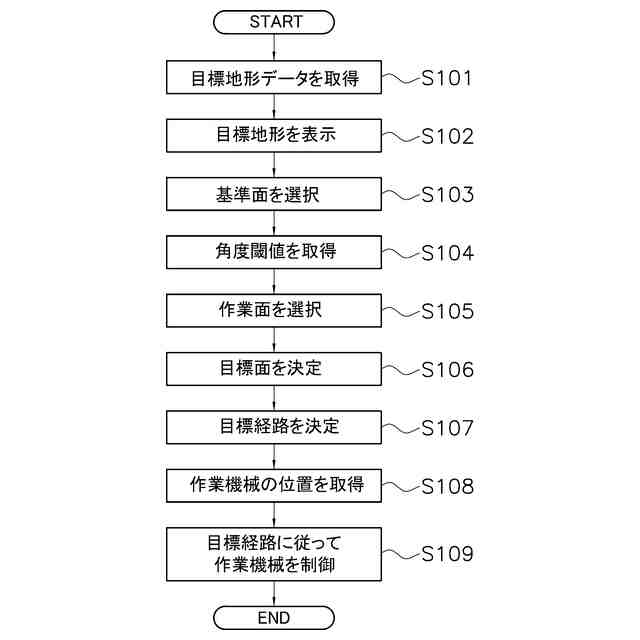
自動制御の処理を示すフローチャートである。
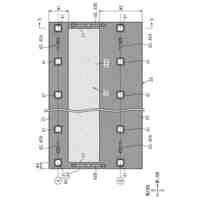
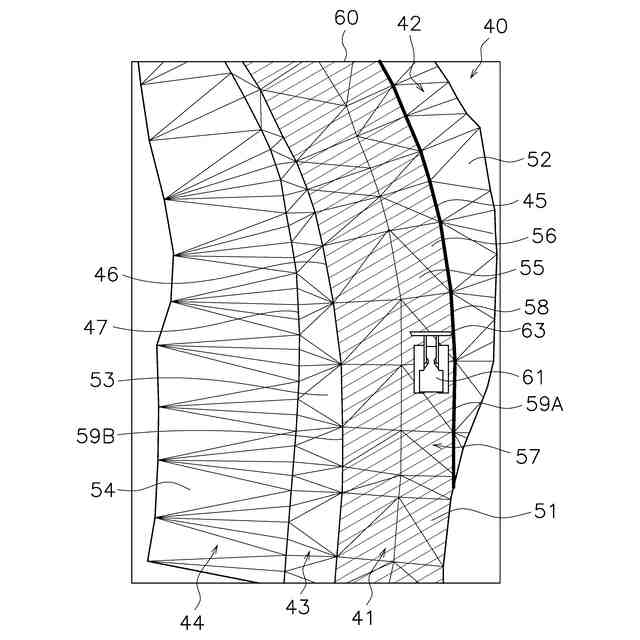
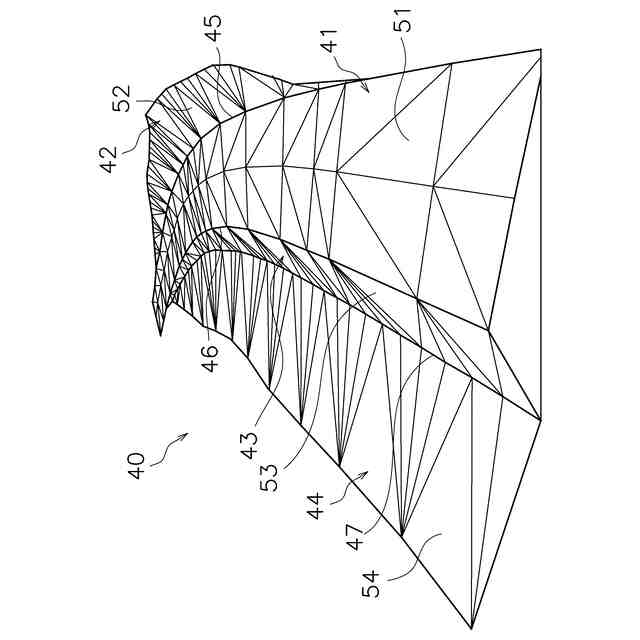
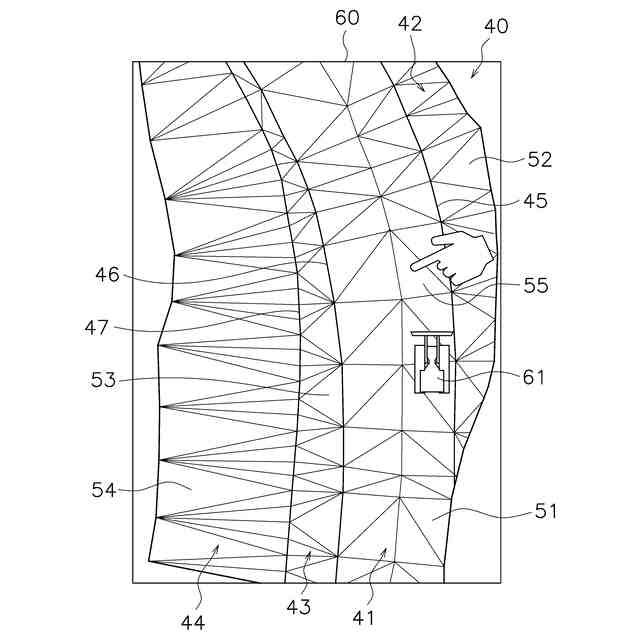
目標地形の一例を示す図である。
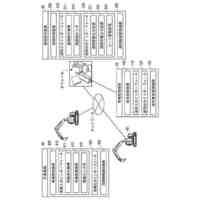
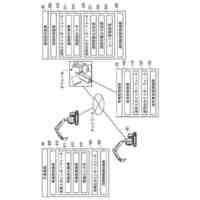
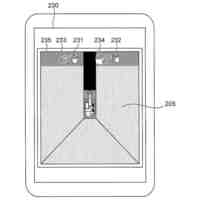
目標経路の設定画面の一例を示す図である。
目標経路の設定画面の一例を示す図である。
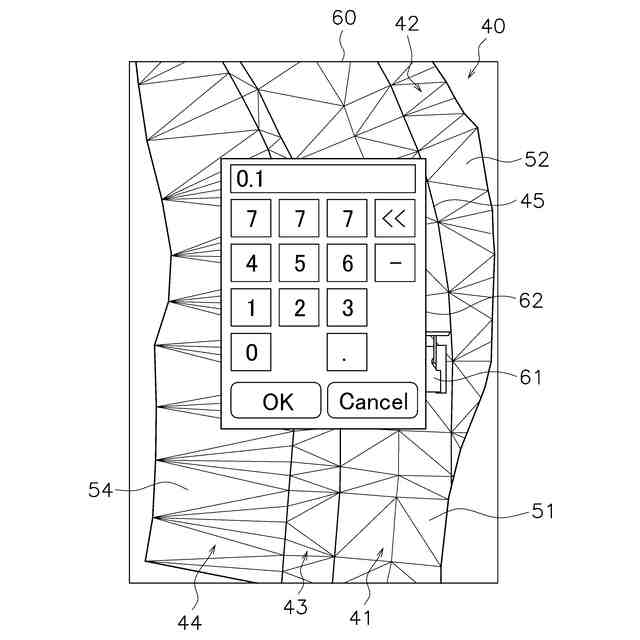
角度閾値の入力画面の一例を示す図である。
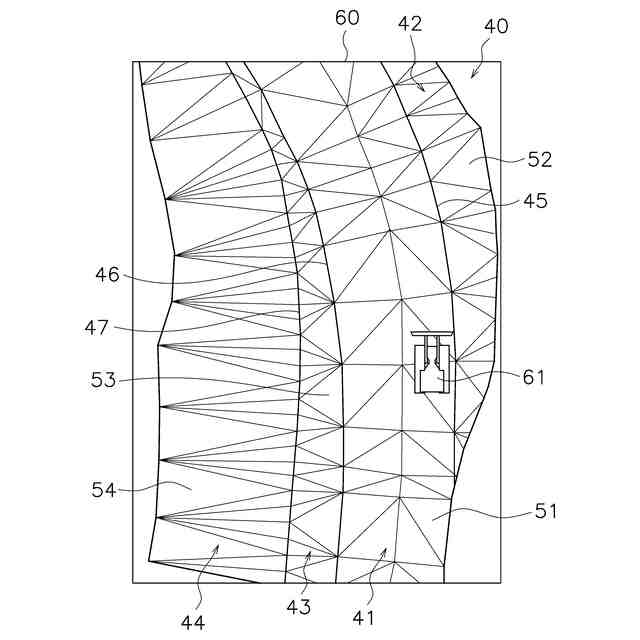
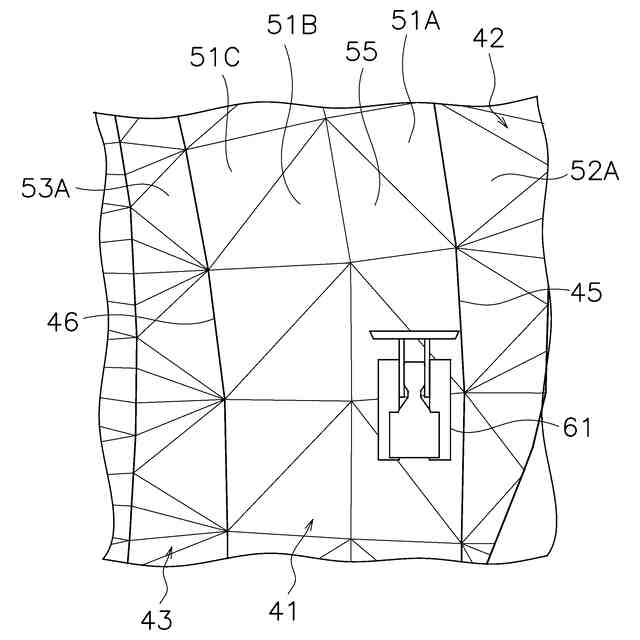
設定画面における目標地形の拡大図である。
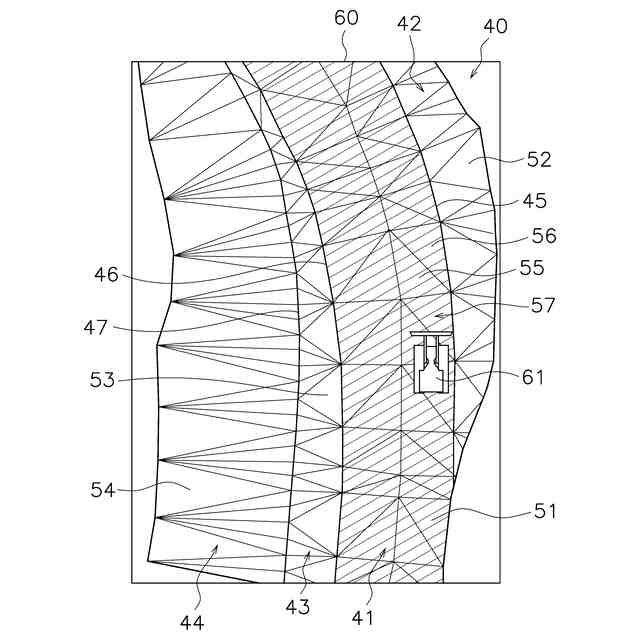
設定画面において選択された複数の作業面及び目標面の一例を示す図である。
設定画面において選択された複数の作業面及び目標面の一例を示す図である。
設定画面において設定された目標経路の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、実施形態に係る作業機械について、図面を参照しながら説明する。図1は、実施形態に係る作業機械1を示す側面図である。本実施形態に係る作業機械1は、ブルドーザである。作業機械1は、車体11と作業機12とを備えている。
【0010】
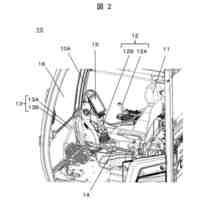
車体11は、運転室13と、駆動源室14と、走行装置15とを含む。運転室13には、図示しない運転席が配置されている。駆動源室14は、運転室13の前方に配置されている。走行装置15は、車体11の下部に設けられている。走行装置15は、左右一対の履帯16を含む。なお、図1では、左側の履帯16のみが図示されている。履帯16が回転することによって、作業機械1が走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
基礎構造
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
株式会社クボタ
作業機
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
株式会社本久
砂防堰堤構造及び砂防堰堤構築方法
1日前
東電設計株式会社
鉄塔基礎構造
1日前
株式会社日立建機ティエラ
建設機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
2日前
コベルコ建機株式会社
操作装置および操作システム
2日前
コベルコ建機株式会社
操作装置および操作システム
2日前
コベルコ建機株式会社
操作装置および操作システム
2日前
株式会社イノアック住環境
被覆部材および被覆工法
1日前
日立建機株式会社
周囲監視システム、および、それを備える作業機械
1日前
鹿島建設株式会社
締固め特性測定方法
今日
高知県公立大学法人
河床洗堀防止護床構造及びその施工方法
1日前
株式会社アクティオ
センサー取付用ブラケット、センサーケーブルユニット、およびセンサーユニット交換方法
1日前
エム・エムブリッジ株式会社
護岸構造物及び護岸構造
1日前
他の特許を見る

 特許ウォッチ
特許ウォッチ