TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025008219
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023110187
出願日
2023-07-04
発明の名称
衝突検知方法及び衝突検知システム
出願人
株式会社ユーシン精機
代理人
弁理士法人西浦特許事務所
主分類
H02P
29/00 20160101AFI20250109BHJP(電力の発電,変換,配電)
要約
【課題】電気フィルタやタイマを用いることなく、ノイズや加減速の影響を実質的に無くして、しかも「不測の衝突」を従来よりも早く検知できる衝突検知方法及びシステムを提供する。
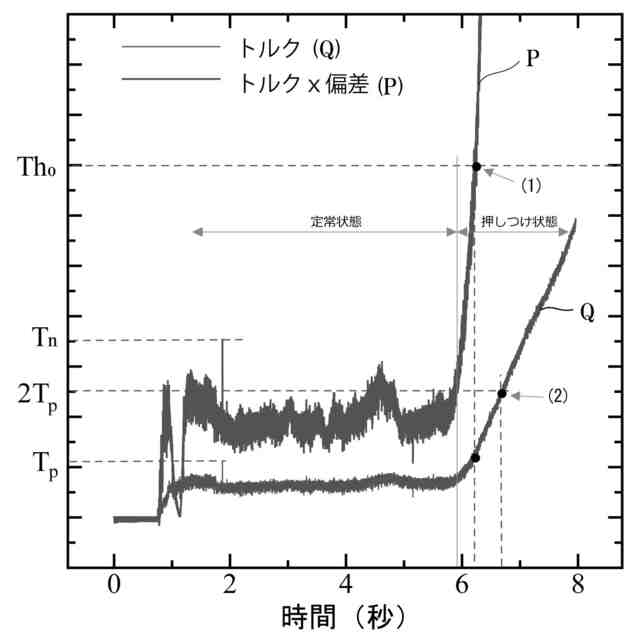
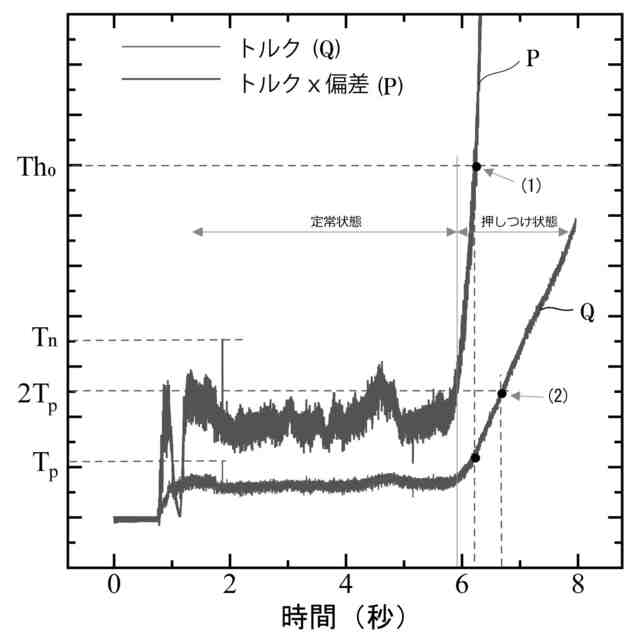
【解決手段】衝突が発生した直後の所定期間内にモータのトルクと相関関係を持つ第1のパラメータQと第1のパラメータとは異なるがトルクと相関関係を持つ第2のパラメータXを、予め定めた乗算式P=Q×Xに入力して得た演算値Pを予め定めた閾値Th0と比較する。演算値Pが閾値Th0を超えると、不測の衝突が発生したと判定する。
【選択図】 図5
特許請求の範囲
【請求項1】
モータを駆動源として位置を変更する支持部に支持された可動部を備えた機械装置において、前記可動部が被衝突物と不測の衝突をしたことを検知する衝突検知方法であって、
前記衝突が発生した直後の所定期間内において、前記モータのトルクと相関関係を持つ第1のパラメータと該第1のパラメータとは異なるが前記トルクと相関関係を持つ第2のパラメータを、予め定めた乗算式に入力して得た演算値を予め定めた閾値と比較し、
前記演算値が前記閾値を超えると、前記不測の衝突が発生したと判定することを特徴とする衝突検知方法。
続きを表示(約 1,000 文字)
【請求項2】
前記第1のパラメータ及び前記第2のパラメータのうち1以下の値になるパラメータは、パラメータ値を逆数にして前記乗算式に入力することにより前記演算値を求める請求項1に機作の衝突検知方法。
【請求項3】
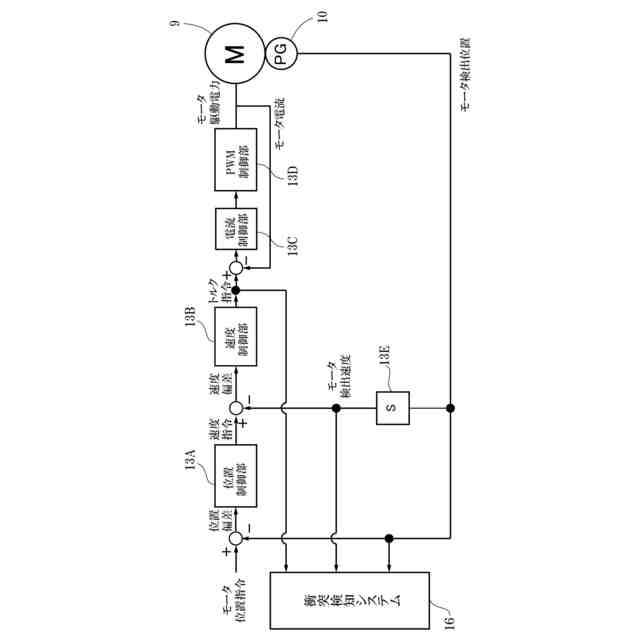
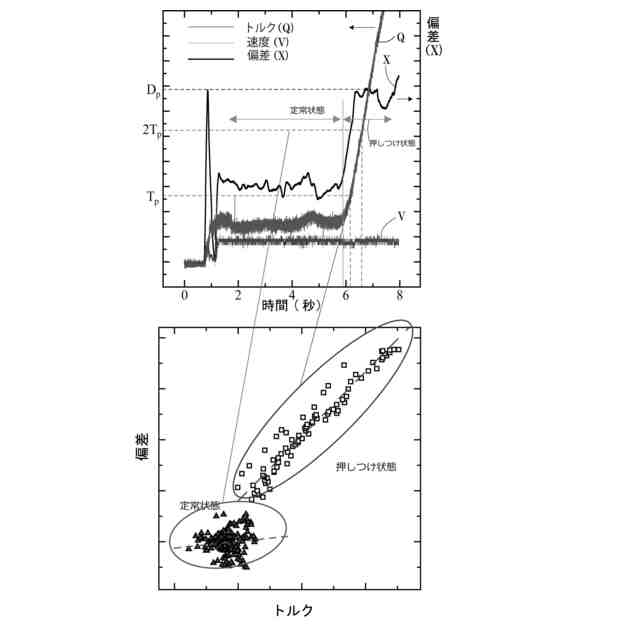
前記第1のパラメータは、前記モータの駆動部にフィードバックされるトルクに関するパラメータであり、前記第2のパラメータは前記モータの駆動部に与えられた位置指令値と前記可動部の位置を検出して得た検出位置との位置偏差である請求項1に記載の衝突検知方法。
【請求項4】
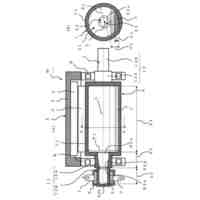
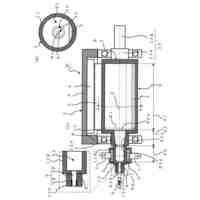
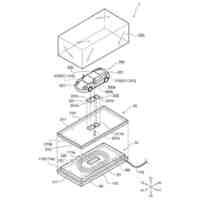
前記機械装置は、成形品取出機であり、前記可動部は前記成形品取出機の取出ヘッドであり、且つ前記支持部は前記取出ヘッドを支持する支持アームであり、
前記閾値は、前記成形品取出機において、前記取出ヘッドにより成形品を取り出すための動作工程を設定するティーチング作業で許容される衝突により得られる前記演算値よりも大きな値である請求項1に記載の可動部の衝突検知方法。
【請求項5】
前記演算値をPとし、前記第1のパラメータをQとし、前記第2のパラメータをXとしたときに、前記乗算式はP=Q×Xである請求項4に記載の衝突検知方法。
【請求項6】
モータを駆動源として位置を変更する支持部に支持された可動部を備えた機械装置において、前記可動部が被衝突物と衝突したことを検知する衝突検知システムであって、
前記衝突が発生した直後の所定期間内に前記モータのトルクと相関関係を持つ第1のパラメータを取得する第1のパラメータ取得部と、
前記衝突が発生した直後の所定期間内に前記トルクと相関関係を持ち且つ前記第1のパラメータとは異なる第2のパラメータを取得する第2のパラメータ取得部と、
前記第1のパラメータと前記第2のパラメータを予め定めた乗算式に入力して演算値を得る演算部と、
前記演算値を予め定めた閾値と比較し、前記演算値が前記閾値を超えると、不測の衝突が発生したと判定する判定部とを備えたことを特徴とする衝突検知システム。
【請求項7】
前記機械装置は、成形品取出機であり、前記可動部は前記成形品取出機の取出ヘッドであり、且つ前記支持部は前記取出ヘッドを支持する支持アームであり、
前記閾値は、前記取出ヘッドにより成形品を取り出すための動作工程を設定するティーチング作業で許容される衝突により得られる前記演算値よりも大きな値である請求項6に記載の可動部の衝突検知システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータを駆動源として位置を変更する支持部に支持された可動部を備えた機械装置において、可動部が被衝突物と不測の衝突をしたことを検知する衝突検知方法及びシステムに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
産業用ロボットのアーム等が周辺機材等の障害物に意図せずに衝突をする(不測の衝突をする)と、周辺機材やロボットを損傷してしまうことが考えられる。そこで、従来、ロボットと障害物との衝突を早期に検出して、衝突が生じた場合にはロボットを自動停止させる技術が提案されている。
【0003】
例えば、特開平1-230107号公報(特許文献1)には、サーボモータへ出力されるトルク指令値をロボットの動作状態を示すパラメータとして、このトルク指令値を所定周期で検出し、前周期で検出されたトルク指令値と今周期で検出されたトルク指令値の差が所定値以上となったときに、被駆動体に衝突したと判定して、サーボモータの回転を停止させる技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平1-230107号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、ロボットの動作状態の変化を算出するパラメータを検出するセンサや、サーボアンプでは、電気ノイズが発生するために、動作状態量が大きく変化する。また、ギアの噛みこみなどによって発生する機械的な特性(機械的ノイズ特性)や、ロボットの急な加減速(手動操作時のインチング初動等)により、動作状態量が大きく変化することもある。したがって、従来の技術では、動作状態量に対する所定値(閾値)を低く設定することにより、衝突の検知を早めようとすると、上記の動作状態の変化まで「不測の衝突」として誤検知し、ロボットを非常停止してしまう。ロボットの種類によっては、軽微な衝突であっても性能劣化や事故の原因となる場合がありうるため、ロボットが非常停止した場合には、その都度点検等の対策を施す必要があり、生産計画を乱してしまうことがある。
【0006】
これを避けるためには、ノイズを考慮し、所定値(閾値)を高く設定することが考えられるが、その結果、不測の衝突の検知は遅れることになる。
【0007】
また、ノイズや急な加減速の影響を除去するために、電気フィルタやタイマを用いることも考えられるが、これらを用いると時間遅れが発生し、これも不測の衝突の検知の遅れを生じさせる原因となる。
【0008】
本発明の目的は、電気フィルタやタイマを用いることなく、ノイズや加減速の影響を実質的に無くして、しかも「不測の衝突」を従来よりも早く検知できる衝突検知方法及びシステムを提供することにある。
【課題を解決するための手段】
【0009】
本発明は、モータを駆動源として位置を変更する支持部に支持された可動部を備えた機械装置において、可動部が被衝突物と不測の衝突をしたことを検知する衝突検知方法である。本発明の衝突検知方法では、衝突が発生した直後の所定期間内において、モータのトルクと相関関係を持つ第1のパラメータと該第1のパラメータとは異なるがトルクと相関関係を持つ第2のパラメータを、予め定めた乗算式に入力して得た演算値を予め定めた閾値と比較し、演算値が閾値を超えると、不測の衝突が発生したと判定する。
【0010】
第1のパラメータと第2のパラメータは、それぞれ衝突が発生した直後の所定期間内において、トルクと相関関係を有するパラメータである。ここで「直後の所定期間」とは、第1のパラメータ及び第2のパラメータがトルクと相関関係を有する期間内の期間である。パラメータによっては、衝突が発生し直後の所定期間を経過した後に、トルクと相関関係がなくなるものもあるし、トルクと相関関係を有し続けるものもある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
17日前
個人
高圧電気機器の開閉器
4日前
キヤノン電子株式会社
モータ
16日前
キヤノン電子株式会社
モータ
24日前
日星電気株式会社
ケーブル組立体
1か月前
コーセル株式会社
電源装置
25日前
トヨタ自動車株式会社
モータ
16日前
株式会社アイドゥス企画
減反モータ
4日前
株式会社デンソー
回転機
1か月前
株式会社kaisei
発電システム
1か月前
個人
二次電池繰返パルス放電器用印刷基板
1か月前
株式会社ミツバ
回転電機
1か月前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
非接触受電装置
1か月前
矢崎総業株式会社
電源回路
3日前
株式会社ダイヘン
インバータ装置
1か月前
トヨタ自動車株式会社
固定子の加熱装置
27日前
トヨタ自動車株式会社
ステータの製造装置
17日前
日産自動車株式会社
ロータシャフト
11日前
日産自動車株式会社
ロータシャフト
11日前
ローム株式会社
モータドライバ回路
11日前
山洋電気株式会社
モータ
1か月前
矢崎総業株式会社
ワイヤーハーネス
1か月前
個人
非対称鏡像力を有する4層PWB電荷搬送体
11日前
株式会社TMEIC
電力変換装置
1か月前
株式会社明治ゴム化成
ワイヤレス給電用部品
26日前
トヨタ紡織株式会社
ロータの製造装置
25日前
京商株式会社
模型用非接触電力供給システム
4日前
株式会社アイシン
電力変換装置
16日前
株式会社マキタ
電動作業機
24日前
個人
電線盗難防止方法及び電線盗難防止装置
24日前
株式会社デンソー
ステータ及びモータ
1か月前
トヨタ自動車株式会社
可変界磁ロータ
19日前
株式会社ダイフク
非接触給電設備
1か月前
大阪瓦斯株式会社
充放電中継装置
17日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ